Degradace – Snížená kvalita – Údržba
Degradace označuje jakékoliv snížení kvality, výkonu nebo integrity systému či produktu. V letectví i dalších odvětvích má degradace dopad na bezpečnost, spoleh...
8 min čtení
Aviation
Maintenance
+4
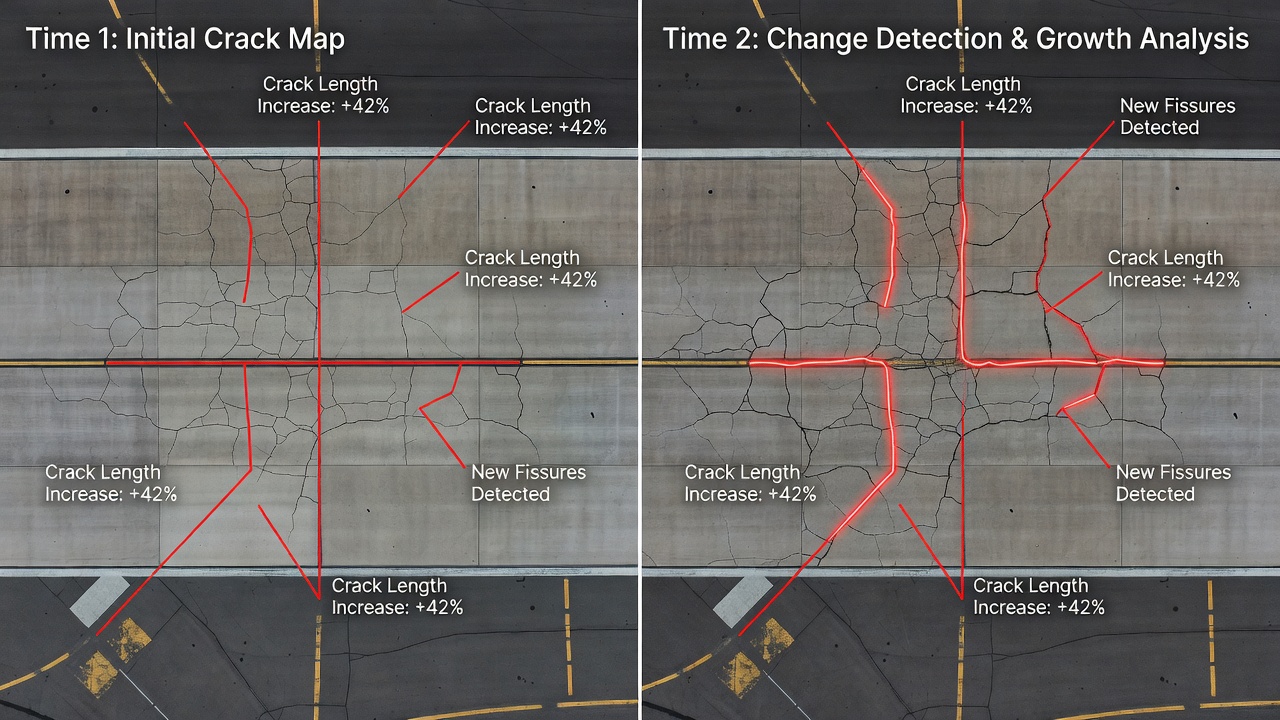
Detekce změn porovnává koregistrované snímky nebo mračna bodů stejné konstrukce pořízené v různých časech za účelem identifikace nových, zhoršujících se nebo opravených vad — trhlin, které se rozrostly, odštěpků, které se zvětšily, koroze, která se rozšířila. Umožňuje kvantitativní sledování deteriorace v čase pro monitorování infrastruktury.
Detekce změn je proces identifikace rozdílů ve stavu konstrukce, povrchu nebo prostředí porovnáváním pozorování pořízených v různých časových okamžicích. V kontextu monitorování stavební infrastruktury detekce změn systematicky porovnává koregistrované snímky, ortomoziky nebo 3D mračna bodů stejného aktiva — dráhy, mostovky, vozovky nebo budovy — pořízené během opakovaných měření, aby identifikovala nové vady, kvantifikovala progresi stávající deteriorace a ověřila účinnost údržbových zásahů. Na rozdíl od jednorázové inspekce, která zachycuje pouze momentální snímek aktuálního stavu, odhaluje detekce změn časový rozměr deteriorace: které trhliny aktivně rostou, které odštěpky se zvětšují, kde se šíří koroze a jaké deformace se kumulují.
Základním účelem detekce změn je transformovat data o stavu infrastruktury ze statických snímků do dynamických časových záznamů. Jedna inspekce odpovídá na otázku “jaký je aktuální stav?” Detekce změn odpovídá na provozně relevantnější otázku “jak se stav mění?” Tento rozdíl je kritický pro správu infrastrukturních aktiv, protože deteriorace je dynamický proces. Trhlina, která zůstala stabilní o šířce 0,3 mm po dobu tří let, představuje jinou prioritu údržby než trhlina, která ve stejném období narostla z 0,3 mm na 1,5 mm, přestože obě trhliny vypadají při jedné inspekci identicky. Detekce změn kvantifikuje tuto rychlost deteriorace, což umožňuje plánování údržby na základě stavu, rozpočtové prognózování a hodnocení rizik, která jsou z pouhých statických inspekcí nemožná.
V oblasti správy letištních vozovek podle ICAO Annex 14 — Letiště, Svazek I je provozovatel letiště povinen udržovat vozovky ve stavu, který zabraňuje poškození letadel a je prostý uvolněného materiálu. Zatímco periodické vizuální inspekce splňují základní požadavky na shodu, ICAO Doc 9157 (Příručka pro projektování letišť, Část 3: Vozovky) a norma ASTM D5340 pro index stavu letištních vozovek (PCI) zdůrazňují význam sledování trendů deteriorace v čase. Detekce změn poskytuje kvantitativní základ pro analýzu trendů, což umožňuje provozovatelům letišť identifikovat vozovky s akcelerující rychlostí deteriorace dříve, než dosáhnou kritického stavu. Tato metodika přímo podporuje cíle Globálního plánu letecké navigace ICAO (GANP) pro odolnost infrastruktury a optimalizaci údržby založenou na riziku.
Koncept detekce změn pochází z dálkového průzkumu a geoprostorové analýzy, kde byl vyvinut pro monitorování změn ve využití půdy, sledování odlesňování a analýzu městského rozvoje pomocí satelitních snímků. Tyto základní metody — rozdílová analýza snímků, analýza hlavních komponent a porovnávání po klasifikaci — byly adaptovány a rozšířeny pro infrastrukturní aplikace, kde je měřítko změn mnohem menší (milimetry až centimetry namísto metrů až kilometrů) a požadavky na přesnost jsou odpovídajícím způsobem vyšší. Moderní detekce změn infrastruktury pracuje s přesností sub-milimetru pro měření trhlin a sub-centimetru pro monitorování deformací.
Spolehlivá detekce změn zásadně závisí na přesnosti registrace snímků — procesu geometrického zarovnání dvou nebo více snímků stejné scény tak, aby odpovídající pixely představovaly stejné fyzické místo na konstrukci. Bez přesné registrace bude jakékoli porovnání mezi snímky obsahovat falešné signály změn na okrajích objektů, texturních rozhraních a povrchových prvcích, které jsou pouze nesprávně zarovnány, nikoli fyzicky změněny. Chyby registrace i o jeden pixel mohou vytvářet falešné artefakty změn, které překryjí skutečné signály vad, zejména u malých vad, jako jsou trhliny, které mohou být v typických snímcích infrastruktury široké pouze 2–5 pixelů.
Vztah mezi přesností registrace a minimální detekovatelnou změnou je řízen poměrem signálu k šumu detekčního systému. U metod detekce změn založených na pixelech se chyby registrace projevují jako aditivní šum v rozdílovém snímku. Výzkum konzistentně prokazuje, že sub-pixelová přesnost registrace — typicky lepší než 0,5 pixelu střední kvadratické chyby (RMSE) — je vyžadována pro spolehlivou detekci malých změn vad. Při velikosti pixelu v terénu (GSD) 1 mm na pixel (typické pro přesné měření drah) to odpovídá toleranci geometrického zarovnání 0,5 mm. Dosáhnout této tolerance při opakovaných měřeních prováděných s odstupem měsíců nebo let vyžaduje konzistentní metodiky měření, stabilní sítě pozemních kontrolních bodů a robustní registrační algoritmy.
Registrace založená na příznacích identifikuje výrazné, opakovatelné příznaky v referenčním i cílovém snímku, vytváří korespondence mezi těmito příznaky a počítá geometrickou transformaci, která mapuje cílový snímek do souřadnicového systému referenčního snímku. Tento přístup je nejpoužívanější metodou pro detekci změn infrastruktury, protože je robustní vůči změnám osvětlení, mírným rozdílům v úhlu pohledu a sezónním změnám vzhledu povrchu, které nepředstavují konstrukční deterioraci.
Registrační pipeline začíná detekcí příznaků pomocí algoritmů navržených pro opakovatelnost za různých zobrazovacích podmínek. Scale-Invariant Feature Transform (SIFT) zůstává nejpoužívanějším detektorem pro registraci infrastruktury, identifikuje klíčové body v místech s vysokým prostorovým gradientem, které jsou robustní vůči změnám měřítka a rotaci. Speeded-Up Robust Features (SURF) poskytuje rychlejší výpočet se srovnatelným výkonem pro mnoho aplikací. Pro povrchy vozovek, kde je textura relativně jednotná, nabízejí orientované FAST a rotované BRIEF (ORB) příznaky a AKAZE příznaky alternativy s různými kompromisy mezi výpočetní efektivitou a robustností přiřazování. Typická 20megapixelová ortomozika 500metrového úseku dráhy poskytuje 10 000–50 000 detekovatelných příznaků v závislosti na textuře vozovky, rozteči spár a povrchových značeních.
Přiřazování příznaků vytváří korespondenci mezi detekovanými příznaky v referenčním a cílovém snímku pomocí podobnosti deskriptorových vektorů, typicky měřené jako euklidovská nebo Hammingova vzdálenost mezi deskriptorovými vektory. Počáteční sada přiřazení nevyhnutelně obsahuje odlehlé hodnoty — nesprávné korespondence vznikající z opakujících se vzorů, podobných texturních oblastí nebo nejednoznačnosti příznaků. Odmítání odlehlých hodnot používá RANSAC (Random Sample Consensus) nebo jeho varianty (MLESAC, MSAC) k iterativnímu odhadu transformačního modelu při současné klasifikaci přiřazení jako vnitřních nebo odlehlých hodnot na základě jejich konzistence s odhadovaným modelem. Práh RANSAC 2–3 pixelů v rozlišení ortomoziky je typický pro detekci změn infrastruktury, přičemž odmítá přiřazení, jejichž zbytková chyba tuto hodnotu přesahuje.
Model geometrické transformace je vybrán na základě očekávané deformace mezi měřeními. Pro opakovaná měření dronem prováděná s konzistentními letovými parametry a RTK polohováním je typicky dostačující podobnostní transformace (posun, rotace, jednotné měřítko) nebo afinní transformace (šest parametrů: dva posuny, dvě měřítka, dvě zkosení). Pro měření s významnými perspektivními rozdíly nebo terénní variabilitou může být vyžadována projektivní transformace (osm parametrů, také nazývaná homografie) nebo polynomická transformace (vyššího řádu, typicky 2. nebo 3. řádu pro rozsáhlá měření). Transformace se počítá z vnitřních korespondencí pomocí metody nejmenších čtverců, přičemž zbytková RMSE slouží jako primární metrika kvality. RMSE registrace pod 0,5 pixelu je cílem pro vysoce kvalitní detekci změn; RMSE nad 1 pixel indikuje potřebu zlepšených kontrolních bodů nebo výběru transformačního modelu.
Registrace založená na intenzitě pracuje přímo s hodnotami intenzity pixelů namísto diskrétních příznaků, optimalizuje transformační parametry tak, aby maximalizovala metriku podobnosti vypočtenou přes překrývající se oblast snímku. Tento přístup je výhodný, když obsah snímku postrádá dostatečné výrazné příznaky pro spolehlivé přiřazování příznaků — například čerstvě položené betonové povrchy, rovnoměrně texturovaný asfalt nebo povrchy pokryté vodou či nečistotami. Metody založené na intenzitě se také používají pro dolaďování po počáteční registraci založené na příznacích, čímž se dosahuje sub-pixelové přesnosti potřebné pro vysoce citlivou detekci změn.
Optimalizační proces iterativně transformuje cílový snímek, počítá metriku podobnosti vůči referenčnímu snímku a upravuje transformační parametry pro zlepšení metriky. Mezi běžné metriky podobnosti patří:
Normalizovaná křížová korelace (NCC) počítá korelační koeficient mezi odpovídajícími intenzitami pixelů po normalizaci každého obrazového okna na nulový průměr a jednotkovou směrodatnou odchylku. Hodnoty NCC se pohybují od -1 do +1, přičemž hodnoty blízké 1 indikují silné zarovnání. NCC je robustní vůči lineárním rozdílům intenzit mezi snímky, což ji činí vhodnou pro měření s různým nastavením expozice nebo malými změnami osvětlení.
Vzájemná informace (MI) měří statistickou závislost mezi rozděleními intenzit obou snímků na základě informační entropie. MI je zvláště robustní vůči nelineárním rozdílům intenzit mezi snímky, jako jsou ty způsobené různými typy senzorů, sezónními změnami vegetace nebo podmínkami suchého versus mokrého povrchu. MI mezi dvěma dokonale zarovnanými snímky stejné scény je maximalizována, když má sdružené rozdělení intenzit minimální entropii — tj. vztah mezi intenzitami je co nejvíce předvídatelný.
Součet čtverců rozdílů (SSD) a Součet absolutních rozdílů (SAD) jsou nejjednodušší metriky, které přímo počítají pixelový rozdíl intenzit. Předpokládají, že odpovídající pixely ve dvou snímcích by měly mít po geometrickém zarovnání identické intenzity, což je předpoklad, který v praxi málokdy platí kvůli variacím osvětlení, expozice a odezvy senzoru. SSD a SAD se typicky používají pouze pro vícepohledové stereo přiřazování v rámci jednoho měřického cyklu, nikoli pro mezidobou detekci změn.
Optimalizační algoritmy pro registraci založenou na intenzitě zahrnují gradientní sestup, Powellovu metodu a Levenbergův-Marquardtův algoritmus. Multi-resolution (od hrubé k jemné) strategie jsou standardem, začínají se zmenšenými snímky pro odhad přibližného zarovnání a postupně zpřesňují ve vyšších rozlišeních. Pro detekci změn infrastruktury dosahuje registrace založená na intenzitě typicky přesnosti 0,1–0,3 pixelu po dolaďování ve srovnání s 0,3–0,8 pixelu pro metody založené pouze na příznacích.
Georeferencovaná registrace využívá zaměřené pozemní kontrolní body (GCP) a přesné pozice kamer z RTK (Real-Time Kinematic) nebo PPK (Post-Processed Kinematic) GNSS k přímému stanovení geometrického vztahu mezi snímky a souřadnicemi v reálném světě. Každý snímek je opatřen geotagem s pozicí kamery (X, Y, Z) a orientací (omega, phi, kappa) z palubního GNSS/IMU a tato informace je zpřesňována během fotogrammetrického zpracování pomocí GCP zaměřených s centimetrovou přesností.
Klíčovou výhodou georeferencované registrace pro detekci změn je, že opakovaná měření jsou inherentně zarovnána do stejného souřadnicového systému, což významně redukuje problém registrace. Namísto výpočtu párových transformací mezi měřickými cykly je každé měření zpracováno nezávisle na výrobu ortomozik a mračen bodů ve společném referenčním souřadnicovém systému (typicky WGS84 s lokálním transverzálním Mercatorovým zobrazením). Zbývající nesouosost mezi měřeními je pak korigována pomocí zbytkové transformace odhadnuté ze stabilních prvků viditelných v obou datových sadách — značení vozovek, světel na drahách, těsnění spár nebo vyhrazených měřických terčů.
Norma ISO 19157 pro kvalitu geografických informací specifikuje požadavky na polohovou přesnost geoprostorových dat, které se přímo vztahují na georeferencovanou detekci změn. Pro monitorování infrastruktury jsou typické cíle přesnosti horizontální RMSE lepší než 3 cm a vertikální RMSE lepší než 5 cm u měření vozovek. Pokud je těchto přesností dosaženo pomocí fotogrammetrie založené na GCP nebo RTK polohování dronu, je zbytková chyba registrace mezi opakovanými měřeními typicky 1–3 pixely při GSD 1 mm, která je pak dále redukována jemnou registrací na sub-pixelovou úroveň.
ICAO Annex 15 — Letecké informační služby stanovuje požadavky na kvalitu leteckých dat, které ovlivňují návrh měření pro detekci změn. Data z měření používaná pro správu letištních vozovek musí splňovat definované úrovně přesnosti, rozlišení a integrity odpovídající kritičnosti dat. U aplikací detekce změn, kde data z měření ovlivňují rozhodnutí o údržbě týkající se bezpečnosti drah, jsou požadavky na kvalitu dat odpovídajícím způsobem přísné, vyžadující dokumentované ověření přesnosti pomocí nezávislých kontrolních bodů a komplexní metadata.
Rozdílová analýza snímků je nejpřímější a výpočetně nejefektivnější metoda detekce změn. Po registraci se počítá pixelový rozdíl mezi referenčním snímkem a cílovým snímkem: Difference(x, y) = I_cíl(x, y) - I_reference(x, y). Pro černobílé snímky s 8bitovými hodnotami intenzity (0–255) se rozdílový snímek pohybuje od -255 do +255, typicky přeškálovaný na 0–255 pro vizualizaci. Oblasti beze změny produkují hodnoty blízké nule (v závislosti na šumu senzoru a malé změně osvětlení), zatímco oblasti s fyzickou změnou produkují významné kladné nebo záporné odchylky.
Kritickým parametrem v rozdílové analýze snímků je práh změny — velikost rozdílu, nad kterou je pixel klasifikován jako změněný. Volba vhodného prahu vyžaduje vyvážení míry detekce (správné identifikace skutečných změn) a míry falešných poplachů (nesprávné klasifikace nezměněných pixelů jako změněných). Optimální práh závisí na poměru signálu k šumu zobrazovacího systému, přesnosti registrace a velikosti sledovaných změn. Mezi běžné přístupy k výběru prahu patří:
Prahování směrodatnou odchylkou nastavuje práh na k × σ, kde σ je směrodatná odchylka rozdílového snímku v oblastech známých jako nezměněné a k je násobitel typicky mezi 2 a 5. Práh 3σ odpovídá přibližně 99,7% spolehlivosti, že pixelový rozdíl přesahující tuto hodnotu představuje skutečnou změnu, za předpokladu normálně distribuovaného šumu.
Otsuova metoda počítá práh, který minimalizuje vnitrotřídní rozptyl mezi pixely změny a beze změny, čímž se automaticky přizpůsobuje statistickým vlastnostem každého rozdílového snímku. Tato metoda je účinná, když změněná oblast tvoří střední zlomek celkového snímku (5–30 %).
Bayesovské prahování modeluje rozdílový snímek jako směs dvou rozdělení — pixely beze změny sledující úzké Gaussovo rozdělení se středem v nule a pixely změny sledující širší rozdělení s možným nenulovým středem. Algoritmus Expectation-Maximization (EM) odhaduje parametry obou rozdělení a optimální práh je vypočten z průsečíku obou rozdělení.
Rozdílová analýza snímků je nejúčinnější pro detekci změn vzhledu povrchu: nové trhliny (tmavé lineární prvky na světlé vozovce), zabarvení z netěsností nebo chemických úniků, růst vegetace a povrchové zabarvení z iniciace koroze. Je méně účinná pro kvantifikaci geometrických změn, které neprodukují silné rozdíly intenzity — například rozšiřování trhliny, kde byla trhlina již viditelná v referenčním snímku a nárůst šířky vytváří pouze jemné posuny hran.
Analýza hlavních komponent (PCA) aplikovaná na detekci změn transformuje vícečasová obrazová data do nového souřadnicového systému, kde se informace o změnách koncentruje do specifických komponent. Pro dvojici snímků (referenční a cílový) je PCA počítána na kombinované datové matici, čímž vznikají dvě hlavní komponenty. První hlavní komponenta zachycuje společnou informaci — pixely, které jsou si mezi oběma snímky podobné. Druhá hlavní komponenta zachycuje zbytkový rozdíl — informaci o změně.
Výhodou PCA oproti jednoduché rozdílové analýze je, že automaticky dekoreluje data, čímž odděluje signály změn od systematických rozdílů v celkovém jasu, kontrastu a odezvě senzoru. To činí PCA robustnější vůči změnám osvětlení mezi měřeními. PCA obraz změny (typicky druhá hlavní komponenta) často odhaluje jemné změny, které by byly při přímé rozdílové analýze pohřbeny v šumu.
Pro vícečasovou analýzu se třemi nebo více měřickými cykly rozšiřuje koncept PCA Multivariate Alteration Detection (MAD). MAD hledá lineární transformace vícečasových dat, které maximalizují korelaci mezi transformovanými pásmy, a poté identifikuje změny jako odchylky od této korelační struktury. Komponenty MAD jsou řazeny sestupně podle obsahu informace o změně, což umožňuje analytikovi zaměřit se na nejvýznamnější signály změn. Iterativně převážená MAD (IR-MAD) zlepšuje robustnost iterativním snižováním váhy pixelů identifikovaných jako změněné v předchozích iteracích, čímž zpřesňuje model pozadí beze změny.
Metody strojového učení pro detekci změn výrazně pokročily s dostupností velkých trénovacích datových sad a architektur hlubokého učení. Tyto metody se učí mapování z dvojic snímků na mapy změn přímo z označených příkladů, namísto spoléhání na ručně vytvořené prahy nebo statistické modely. Pro monitorování infrastruktury jsou relevantní tři hlavní kategorie ML detekce změn:
Klasifikace na úrovni pixelů zpracovává každý pixel nezávisle, klasifikuje jej jako změněný nebo nezměněný na základě příznaků extrahovaných z odpovídajících pixelů v obou snímcích plus kontextu okolí. Mezi příznaky mohou patřit spektrální rozdíly, texturní míry (GLCM, Gaborovy filtry), lokální prostorové statistiky a víceúrovňové reprezentace. Běžnými volbami jsou klasifikátory Random Forest, Support Vector Machines (SVM) a Gradient Boosting. Trénování vyžaduje označené mapy změn pro reprezentativní sadu povrchů infrastruktury a typů vad.
Patch-based hluboké učení používá konvoluční neuronové sítě (CNN) pracující na obrazových výřezech centrovaných na každém pixelu. Siamese síťová architektura zpracovává referenční a cílový výřez prostřednictvím dvou identických CNN větví se sdílenými váhami, poté porovnávací modul (zřetězení, diference nebo korelace) spojuje reprezentace příznaků a klasifikační hlava produkuje pravděpodobnost změny pro centrální pixel. Architektury založené na UNet s přeskakovacími spoji jsou zvláště účinné pro detekci změn, protože zachovávají prostorové rozlišení a zároveň integrují víceúrovňový kontext. Trénovací datové sady pro detekci změn infrastruktury musí zahrnovat reprezentativní příklady každého typu vady (trhliny, odštěpky, koroze, zabarvení) za různého osvětlení a povrchových podmínek.
Detekce změn založená na objektech (OBIA) nejprve segmentuje snímek na smysluplné objekty — jednotlivé panely vozovky, segmenty trhlin, oblasti odštěpků — a poté porovnává objekty v čase namísto pixelů. Tento přístup je zvláště vhodný pro monitorování infrastruktury, protože vady jsou přirozeně objektům podobné: odštěpek je souvislá oblast, trhlina je lineární prvek, skvrny koroze jsou prostorově koherentní. Detekce změn založená na objektech počítá změny vlastností objektů (plocha, obvod, tvar, průměrná intenzita) a klasifikuje objekty jako stabilní, rostoucí, zmenšující se nebo nové. Objektový přístup inherentně redukuje šum z izolovaných pixelových artefaktů a poskytuje informace o změnách v pojmech přímo relevantních pro hodnocení stavu infrastruktury — plocha nového odštěpkování, délka prodloužení trhliny, procentuální nárůst pokrytí korozí.
| Metoda | Typická přesnost | Silné stránky | Omezení |
|---|---|---|---|
| Rozdílová analýza snímků | 60–75% pixelová přesnost | Jednoduchá, rychlá, interpretovatelná | Citlivá na osvětlení, vyžaduje optimální práh |
| PCA / MAD | 70–85% pixelová přesnost | Robustní vůči změnám jasu | Vyžaduje multispektrální nebo vícečasová data |
| Random Forest / SVM | 75–88% pixelová přesnost | Zpracovává nelineární vztahy | Potřebuje označená trénovací data, omezená generalizace |
| CNN (siamese UNet) | 85–95% pixelová přesnost | Vysoká přesnost, učí se prostorový kontext | Vyžaduje velká trénovací data, výpočetně náročné |
| OBIA | 80–92% objektová přesnost | Metriky změn odpovídají sémantice vad | Závislost na kvalitě segmentace, složitý pracovní postup |
Detekce změn trhlin je nejběžnější a provozně nejdůležitější aplikací časové analýzy pro monitorování infrastruktury. Růst trhlin — nárůst šířky, délky nebo hustoty trhlin v čase — je primárním indikátorem aktivní deteriorace betonových a asfaltových konstrukcí. Detekce změn trhlin musí pracovat s citlivostí sub-milimetru, protože měřené rozdíly jsou často menší než samotná trhlina: trhlina, která byla v základním měření široká 0,5 mm a v následném měření je široká 1,2 mm, představuje změnu 0,7 mm, která musí být spolehlivě detekována proti obrazovému šumu a nejistotě registrace.
Detekce změn trhlin na úrovni pixelů používá diferenciální mapování trhlin, kde se porovnávají mapy pravděpodobnosti trhlin z každého měřického cyklu. Mapa pravděpodobnosti trhlin — generovaná modelem hlubokého učení pro segmentaci trhlin nebo konvenčním algoritmem detekce trhlin — přiřazuje každému pixelu hodnotu mezi 0 (žádná trhlina) a 1 (určitá trhlina). Mapa změn je pixelový rozdíl pravděpodobnosti trhlin mezi cykly, s kladnými hodnotami indikujícími nové nebo rozšířené trhliny a zápornými hodnotami indikujícími zhojené nebo utěsněné trhliny. Morfologické filtrování odstraňuje izolované změněné pixely a analýza souvislých komponent seskupuje změněné pixely do diskrétních objektů změn.
Kvantitativní měření změny šířky trhliny vyžaduje lokalizaci hran s přesností sub-pixelu. Pro každý segment trhliny v síti trhlin jsou okraje trhliny extrahovány v sub-pixelovém rozlišení pomocí metod, jako je detekce stupňovitých hran (proložení odezvy hrany skokovou funkcí a nalezení sub-pixelového průchodu nulou), detekce hran založená na momentech (výpočet pozice hrany z obrazových momentů) nebo modely aktivních kontur (snakes), které se vyvíjejí tak, aby odpovídaly hranicím trhliny. Šířka v každém bodě podél trhliny se vypočítá jako vzdálenost mezi dvěma sub-pixelovými pozicemi hran měřená kolmo k ose trhliny. Změna šířky je pak rozdíl mezi cykly v jednotlivých bodech a průměrný nárůst šířky po délce segmentu trhliny je souhrnná statistika. Pro měření letištních vozovek s GSD 1 mm je změna šířky trhliny 0,2–0,3 mm spolehlivě detekovatelná pomocí sub-pixelových metod s přesností lokalizace hran 0,1 pixelu.
Prodloužení délky trhliny měří nárůst celkové délky sítě trhlin. To vyžaduje vektorizaci skeletonu trhliny v každém cyklu jako sady lomených čar a následné přiřazení segmentů trhlin mezi cykly pomocí kritérií prostorového překryvu a blízkosti. Nové prodloužení trhliny se objevuje jako segmenty trhlin v následném měření, které se nepřekrývají s žádným segmentem trhliny v základním měření, ale jsou připojeny ke stávajícím trhlinám. Rychlost růstu trhliny — mm za měsíc nebo mm za rok — se vypočítá vydělením celkového nárůstu délky časovým intervalem mezi měřeními. U dálničních a letištních vozovek se typické rychlosti růstu trhlin pohybují od 0,5–5 mm za měsíc v závislosti na dopravním zatížení, environmentálních podmínkách a konstrukční kapacitě vozovky.
Detekce nových trhlin identifikuje pixely nebo objekty trhlin, které se objevily v následném měření, ale chyběly v základním měření. Vyžaduje to rozlišení skutečných nových trhlin od falešně pozitivních výsledků způsobených nesprávným zarovnáním registrace, rozdíly v osvětlení nebo artefakty povrchové vlhkosti. Detekční proces obvykle zahrnuje následující kroky:
Generování základní masky trhlin pomocí validovaného modelu detekce trhlin se známou mírou falešně pozitivních výsledků. Základní maska by měla konzervativně přeznamenávat spíše než podsegmentovávat — zahrnutí nejistých kandidátů na trhliny snižuje šanci, že budou vynechány nové trhliny, které byly částečně viditelné v základním měření.
Generování následné masky trhlin pomocí stejného modelu detekce trhlin a zpracovatelských parametrů aplikovaných na koregistrovanou následnou ortomoziku. Konzistentní aplikace detekčního algoritmu je nezbytná; změny v detekčním modelu nebo zpracovatelských parametrech mezi cykly by vnesly nefyzické signály změn.
Výpočet masky změn identifikací pixelů, které jsou trhlinou v následné masce, ale netrhlina v základní masce. Morfologické otevření (eroze následovaná dilatací) odstraňuje izolovaný pixelový šum a tenké artefakty na okrajích trhlin způsobené sub-pixelovou nesprávnou registrací.
Geometrické filtrování eliminuje objekty změn, které nesplňují kritéria geometrie trhliny — minimální délka (typicky >10 pixelů), minimální poměr stran (poměr délky k šířce >3) a propojení se stávajícími sítěmi trhlin. Izolované shluky pixelů, které netvoří lineární prvky, jsou klasifikovány jako artefakty netrhlina.
Validace proti manuální inspekci nebo pozemní pravděpodobnosti pro vzorek detekovaných změn za účelem kalibrace míry falešně pozitivních výsledků a úpravy detekčních parametrů.
Minimální detekovatelná šířka nové trhliny je přibližně GSD snímku — typicky 1–2 mm pro měření drah. Trhliny užší než GSD mohou být stále detekovatelné, pokud produkují měřitelný rozdíl intenzity (kontrast) ve snímku, ale spolehlivost detekce se snižuje u trhlin sub-pixelové šířky. Pipeline detekce změn trhlin v TarmacView dosahuje 90–95% míry detekce pro nové trhliny širší než 2 mm při GSD 1 mm, s mírou falešně pozitivních výsledků pod 5 % pro typické povrchy letištních vozovek.
Odštěpkování — fragmentace a oddělování povrchového materiálu z betonu nebo zdiva — vytváří viditelné prohlubně, obnažené kamenivo a ostré hrany na rozhraní mezi zdravým a poškozeným materiálem. Detekce změn odštěpků kvantifikuje nárůst plochy, hloubky a obvodu odštěpků v čase. Na rozdíl od detekce trhlin, která pracuje s lineárními prvky, vyžaduje detekce odštěpků přesné vymezení nepravidelných plošných prvků.
Detekce změn odštěpků používá porovnání založené na segmentaci mezi měřickými cykly. Hranice odštěpku v každé ortomozice je vymezena buď ručně inspektory, semi-automaticky pomocí interaktivních segmentačních nástrojů (grab cut, watershed nebo algoritmy aktivních kontur), nebo plně automaticky pomocí modelů hlubokého učení pro segmentaci (Mask R-CNN, DeepLab nebo UNet trénované na datových sadách odštěpků). Jakmile jsou hranice odštěpků extrahovány jako polygony v každém cyklu, jsou vypočteny metriky změny:
Změna plochy = Plocha_následná - Plocha_základní (typicky uváděna v cm² nebo m²). Rychlost růstu plochy = Změna plochy / časový interval (cm²/měsíc nebo m²/rok). Změna obvodu měří složitost hranice odštěpku, jak postupuje do dříve zdravého materiálu. Radiální růst měří maximální vzdálenost od původní hranice odštěpku k nové hranici v libovolném směru, což indikuje směr nejrychlejší deteriorace.
U betonových konstrukcí se rychlosti růstu odštěpků značně liší v závislosti na mechanismu příčiny. Odštěpky způsobené delaminací indukovanou korozí typicky rostou rychlostí 1–5 cm radiálního prodloužení za rok v agresivním prostředí. Odštěpky způsobené působením mrazu a tání vykazují sezónní vzorce růstu soustředěné v zimě a na jaře. Odštěpky způsobené nárazem nebo přetížením mají typicky náhlý nástup a mohou zůstat stabilní, pokud je příčina zatížení řešena.
Detekce změn koroze identifikuje oblasti, kde se korozní produkty (rez na oceli, oxidační zabarvení na betonu) objevily, rozšířily nebo zesílily mezi měřickými cykly. Koroze se projevuje charakteristickým zabarvením — oranžová, hnědá nebo červenohnědá na ocelových površích; rezavé zabarvení na betonových površích — které je detekovatelné ve snímcích viditelného spektra. Spektrální signatura koroze je odlišná od většiny ostatních povrchových prvků, což umožňuje poměrně robustní detekci.
Výpočet korozního indexu převádí RGB snímky na metriku citlivou na korozi. Mezi běžné indexy patří: poměr Červená/Zelená (zkorodované oblasti mají vyšší červenou odrazivost vzhledem k zelené); Normalizovaný korozní index NCI = (Červená - Zelená) / (Červená + Zelená); a Rezový index RI = (2 × Červená - Zelená - Modrá) normalizovaný intenzitou. Tyto indexy jsou prahovány pro vytvoření binárních map koroze v každém cyklu.
Změna pokrytí korozí je procentuální nárůst plochy zasažené korozí vzhledem k celkové ploše povrchu. U ocelových mostů a součástí je práh detekce změny typicky 1–2 % celkové plochy povrchu pro významnou progresi koroze. U betonových povrchů se zabarvením se používají menší plošné prahy (0,5–1 %), protože zabarvení je často více prostorově rozptýlené než důlková koroze na oceli.
Změna závažnosti koroze kategorizuje progresi koroze podle úrovně závažnosti dle norem jako ISO 4628-3 (Nátěrové hmoty — Hodnocení degradace nátěrů — Část 3: Stupeň rezivění) nebo SSPC-VIS 2 (Standard pro hodnocení stupně rezivění na lakovaných ocelových površích). Detekce změn přiřazuje úroveň závažnosti každé korozní skvrně v každém cyklu a označuje skvrny, které mezi měřeními postoupily na vyšší úroveň závažnosti. Úrovně závažnosti jsou založeny na procentu viditelné plochy povrchu zasažené rzí: Ri0 (0 %), Ri1 (<0,05 %), Ri2 (0,05–0,5 %), Ri3 (0,5–1 %), Ri4 (1–5 %), Ri5 (>5 %) dle ISO 4628-3.
Vzdálenost Cloud-to-Cloud (C2C) je nejjednodušší metoda pro porovnání dvou mračen bodů. Pro každý bod v referenčním mračnu se najde nejbližší soused v cílovém mračnu a vypočítá se mezi nimi euklidovská vzdálenost. Výsledkem je hodnota vzdálenosti pro každý bod, která může být vizualizována jako barevně kódovaná mapa vzdáleností, kde modrá značí žádnou změnu (téměř nulová vzdálenost) a červená značí velkou změnu.
Výhodami C2C jsou výpočetní efektivita (O(n log n) s kd-tree akcelerací) a koncepční jednoduchost. C2C má však zásadní omezení pro detekci změn infrastruktury. Za prvé, měří nejkratší vzdálenost k libovolnému bodu v cílovém mračnu, nikoli vzdálenost ve směru normály k povrchu, což může výrazně podcenit velikost deformace na nakloněných plochách. Za druhé, C2C je citlivá na rozdíly v hustotě bodů mezi mračny — mračno s vyšší hustotou bude systematicky vykazovat menší vzdálenosti nejbližších sousedů bez ohledu na fyzickou změnu. Za třetí, C2C neposkytuje interval spolehlivosti pro měření vzdálenosti, což ztěžuje rozlišení skutečné deformace od šumu měření.
Z těchto důvodů je C2C nejlépe použitelná jako rychlá screeningová metoda pro identifikaci oblastí potenciální změny, po níž následuje důkladnější analýza těchto oblastí pomocí sofistikovanějších metod. V praxi poskytuje C2C s prahem 2–3násobku úrovně šumu mračna bodů konzervativní screening detekce změn, který zachycuje většinu významných změn při minimalizaci falešně pozitivních výsledků ze šumu a variability hustoty.
M3C2 je v současnosti nejpokročilejší algoritmus pro detekci změn mračen bodů, vyvinutý autory Lague, Brodu a Leroux (2013) a široce přijatý v geomorfologii a monitorování infrastruktury. M3C2 řeší omezení C2C výpočtem vzdáleností ve směru lokální normály povrchu v měřítku odpovídajícím drsnosti povrchu, se statisticky rigorózními intervaly spolehlivosti.
Algoritmus M3C2 funguje následovně:
Výpočet normálového vektoru v každém bodě referenčního mračna proložením roviny lokálním okolím. Poloměr okolí (D/2) je zvolen tak, aby odpovídal měřítku analyzovaných povrchových prvků — menší poloměry pro jemné prvky, jako jsou trhliny, větší poloměry pro široké deformační vzorce. Pro monitorování infrastruktury se typické poloměry pohybují od 10 cm pro detailní analýzu trhlin do 1 m pro celkové hodnocení deformace.
Projekce a výpočet vzdálenosti ve směru normály. Pro každý bod v referenčním mračnu je válec o poloměru d (projekční měřítko) orientován podél normálového vektoru. Jsou identifikovány body z referenčního i cílového mračna, které spadají do tohoto válce. Vzdálenost mezi dvěma sadami bodů ve směru normály se vypočítá jako rozdíl mezi jejich průměrnými pozicemi podél normálového vektoru. Projekční měřítko d se typicky nastavuje na 2–5násobek průměrného rozestupu bodů, aby bylo zajištěno dostatečné množství bodů pro robustní výpočet průměru.
Odhad intervalu spolehlivosti pomocí lokální drsnosti mračna bodů a počtu bodů. Algoritmus M3C2 počítá 95% interval spolehlivosti (nebo libovolnou specifikovanou úroveň spolehlivosti) pro měření vzdálenosti v každém bodě, na základě směrodatné odchylky bodů uvnitř projekčního válce a počtu bodů. Změny menší než interval spolehlivosti nejsou statisticky významné a neměly by být interpretovány jako skutečná deformace. Tato vestavěná statistická kontrola kvality je klíčovou výhodou M3C2 oproti jednodušším metodám.
Víceúrovňová analýza umožňuje operátorovi analyzovat změny na více prostorových úrovních současně. Analýza v jemném měřítku (malé D/2 a d) detekuje malé prvky, jako je otevírání trhlin a hranice odštěpků. Analýza v hrubém měřítku (velké D/2 a d) detekuje široké deformace, jako je průhyb mostů a rozdílné sedání. Porovnání výsledků napříč měřítky může rozlišit povrchovou změnu (eroze, depozice, odštěpkování) od deformace (konstrukční posun, náklon, sedání).
Pro monitorování infrastruktury dosahuje M3C2 detekční citlivosti 0,5–2 mm pro mračna bodů z pozemního laserového skeneru s hustotami přesahujícími 500 bodů/m². Pro fotogrammetrická mračna bodů (která mají typicky vyšší šum než TLS data) je detekční citlivost 2–5 mm v závislosti na textuře povrchu, kvalitě snímku a geometrii měření. Algoritmus je implementován v open-source softwaru CloudCompare a je standardní metodou pro detekci změn mračen bodů v infrastrukturních aplikacích po celém světě.
| Metoda detekce změn mračen bodů | Typický detekční práh | Interval spolehlivosti | Nejlepší aplikace |
|---|---|---|---|
| C2C (Cloud-to-Cloud) | 2–5 mm | Není k dispozici | Rychlý screening, detekce velkých změn |
| C2M (Cloud-to-Mesh) | 1–3 mm | Částečný | Deformační analýza vůči referenčnímu povrchu |
| M3C2 | 0,5–2 mm (TLS), 2–5 mm (foto) | Ano (uživatelsky určený) | Kvantitativní monitorování deformací, rigorózní změna |
| PCA na příznacích mračna bodů | 2–10 mm | Statistický | Detekce vzorců změn, nejen velikosti |
DOD porovnává digitální modely reliéfu (DEM) nebo digitální modely povrchu (DSM) generované z mračen bodů v každém měřickém cyklu. Dva DEM jsou odečteny, čímž vzniká rozdílový rastr, kde každá hodnota pixelu představuje změnu nadmořské výšky v daném místě. DOD je výpočetně efektivní, protože pracuje s pravidelnými mřížkami namísto nestrukturovaných mračen bodů, a výsledky jsou snadno vizualizovatelné a interpretovatelné jako tepelné mapy změn nadmořské výšky.
Přesnost DOD závisí na kvalitě generování DEM — interpolace z nepravidelných mračen bodů do pravidelných mřížek přináší dodatečnou nejistotu. Úroveň detekce (LoD) pro DOD se vypočítá jako LoD = t × √(σ_základní² + σ_následná²), kde σ je nejistota nadmořské výšky každého DEM a t je Studentova hodnota t pro požadovanou úroveň spolehlivosti (typicky t = 1,96 pro 95% spolehlivost). DOD je nejvhodnější pro monitorování objemových změn — ztráta materiálu erozí nebo odštěpkováním, akumulace materiálu sedimentem nebo nečistotami a rozsáhlé sedání nebo zdvih. Je méně vhodný pro detekci jemných vad, kde jsou potřeba podrobnosti jednotlivých trhlin nebo odštěpků.
Optimální interval mezi opakovanými měřeními pro detekci změn závisí na rychlosti deteriorace, kritičnosti aktiva, regulatorních požadavcích a minimální detekovatelné změně měřicího systému. Základním principem je, že interval měření by měl být dostatečně krátký, aby očekávaná deteriorace za interval překročila detekční práh analýzy změn, ale dostatečně dlouhý, aby kumulativní změny byly provozně smysluplné a ekonomicky ospravedlnitelné.
Pro letištní vozovky v rámci rámců shody s ICAO Annex 14 je typická frekvence měření:
Roční měření pro všechny provozní vozovky (dráhy, pojezdové dráhy, odbavovací plochy) jako součást rutinního monitorování stavu. Roční měření stanovují základní rychlost deteriorace a identifikují oblasti vyžadující častější pozornost. ICAO Annex 14, Oddíl 10.2 vyžaduje, že “povrch vozovek musí být kontrolován v pravidelných intervalech” a že “frekvence kontrol musí být stanovena podle typu a objemu provozu a převládajících klimatických podmínek.”
Čtvrtletní měření pro vozovky ve špatném stavu (PCI < 40) nebo se známou aktivní deteriorací. Čtvrtletní detekce změn sleduje účinnost provizorní údržby a poskytuje včasné varování před rychlou deteriorací, která může vyžadovat konstrukční zásah.
Měsíční měření pro vozovky sledované pro kritické vady — trhliny poblíž okrajů vozovek, které by mohly vést k odštěpkování, oblasti aktivního sedání nebo úseky vozovek vystavené vysoce namáhavým operacím (např. konce drah, kde letadla zatáčejí a působí vysokým krouticím momentem).
Mimořádná měření po extrémních povětrnostních událostech (vydatné srážky, cykly mrazu a tání, extrémní teplo), po neobvyklých zatěžovacích událostech (přetížená letadla, tvrdá přistání) nebo po údržbových zásazích za účelem ověření účinnosti.
Pro mostní konstrukce se intervaly inspekcí řídí národními normami pro inspekci mostů (např. NBIS ve Spojených státech, DIN 1076 v Německu, BASt směrnice v Evropě). Rutinní vizuální inspekce jsou obvykle dvouleté, ale měření detekce změn pro známé vady mohou být prováděna v odlišných frekvencích:
Dvouletá měření pro mosty v dobrém stavu bez známých významných vad. Tato měření stanovují základní rychlosti deteriorace pro srovnání s budoucími měřeními.
Roční měření pro mosty se známými vadami pod dohledem — trhliny v kritických prvcích, koroze ocelových součástí, zranitelnost vymíláním nebo pohyb v ložiscích.
Čtvrtletní až pololetní měření pro mosty s aktivní deteriorací sledovanou pro rychlost progrese, ověření po opravě nebo mosty se zbývající životností pod 5 let.
Spolehlivá detekce změn při opakovaných měřeních vyžaduje pečlivou kontrolu parametrů sběru dat za účelem minimalizace nefyzikálních rozdílů mezi cykly. Mezi klíčové požadavky na konzistenci patří:
Velikost pixelu v terénu (GSD) by měla být konzistentní napříč měřeními v rozmezí 10–20 %. Významné změny GSD mění prostorové rozlišení, při kterém jsou vady měřeny, a mohou zavádět zdánlivé změny, které jsou čistě artefakty rozdílů v rozlišení. Konzistence GSD je dosažena létáním ve stejné výšce se stejným kamerovým senzorem ve všech měřických cyklech.
Podmínky osvětlení by měly být co nejkonzistentnější. Měření prováděná na přímém slunci vytvářejí silné stíny z trhlin a povrchové textury, které se liší od měření při zatažené obloze. Doporučeným postupem je provádět všechna opakovaná měření za podobných světelných podmínek — nejlépe při zatažené obloze s difuzním osvětlením, které minimalizuje stíny a poskytuje nejjednotnější vzhled povrchu pro detekci vad.
Vlhkost povrchu by měla být konzistentní. Mokré povrchy vozovek vypadají výrazně odlišně od suchých — trhliny se plní vodou a stávají se méně viditelnými, povrchové zabarvení vypadá tmavší a celková odrazivost klesá. Měření by měla být prováděna pouze tehdy, když je povrch vozovky suchý (minimálně 48 hodin od posledních srážek u betonu, 24 hodin u asfaltu).
Parametry kamery a senzoru — expoziční čas, clona, ISO, zaostřovací vzdálenost — by měly být konzistentní. Automatické nastavení expozice (auto-expozice, auto-ISO) by mělo být zakázáno ve prospěch pevného nastavení určeného během plánování měření, aby byla zajištěna konzistentní radiometrie snímků napříč cykly.
Letová dráha a překryv by měly sledovat stejný misijní plán ve všech měřických cyklech. Použití předprogramovaných letových plánů se stejnými waypointy, výškou, rychlostí a nastavením překryvu zajišťuje konzistentní pozorovací geometrii, což zjednodušuje registraci a snižuje geometrické rozdíly mezi měřeními.
Upozornění na změny převádějí kvantitativní měření změn na akční notifikace pro správce infrastruktury. Pravidla upozornění definují velikost změny, která spouští oznámení, kategorizovanou podle úrovně závažnosti pro podporu odpovídající prioritizace reakce. Konfigurace prahů závisí na typu vady, kritičnosti aktiva a provozním kontextu.
Pro upozornění na růst trhlin jsou prahy typicky založeny na nárůstu šířky trhliny:
Úroveň sledování — nárůst šířky trhliny o 0,3–0,5 mm mezi měřeními. Indikuje možné aktivní praskání. Není vyžadována okamžitá akce, ale doporučuje se zvýšená frekvence monitorování. Ověření pozemní inspekcí při příští plánované návštěvě.
Úroveň varování — nárůst šířky trhliny o 0,5–1,5 mm mezi měřeními. Indikuje potvrzené aktivní praskání. Doporučuje se inženýrské vyhodnocení k určení příčiny a posouzení konstrukčních důsledků. Naplánovat podrobnou inspekci do 30–60 dnů.
Úroveň alarmu — nárůst šířky trhliny přesahující 1,5 mm mezi měřeními (nebo jakákoli jednotlivá šířka trhliny přesahující 5 mm, dle směrnic závažnosti ASTM D5340). Indikuje rychle progredující deterioraci. Vyžadováno okamžité inženýrské vyhodnocení. Omezit zatížení, pokud je trhlina v kritickém konstrukčním prvku. Naplánovat opravu do 30 dnů.
Pro upozornění na růst odštěpků jsou prahy založeny na nárůstu plochy:
Úroveň sledování — nárůst plochy odštěpku o 10–25 % vůči základnímu stavu. Monitorovat při příštím měřicím cyklu.
Úroveň varování — nárůst plochy odštěpku o 25–50 % nebo hloubka odštěpku přesahující krycí vrstvu. Naplánovat podrobné posouzení. Vyhodnotit uvolněný materiál, který by se mohl stát FOD (cizí předměty) u letištních vozovek.
Úroveň alarmu — nárůst plochy odštěpku přesahující 50 % vůči základnímu stavu, nebo jakýkoli nový odštěpek přesahující 25 cm v maximálním rozměru na letištních vozovkách (dle směrnic ICAO pro cizí předměty). Vyžadována okamžitá pozemní inspekce. Odstranit uvolněný materiál. Naplánovat opravu do 7–14 dnů.
Pro upozornění na šíření koroze jsou prahy založeny na pokrytí a změně kategorie závažnosti:
Úroveň sledování — nárůst pokrytí korozí o 5–15 % postižené oblasti nebo progrese z Ri2 na Ri3 dle ISO 4628-3. Monitorovat při příštím měření.
Úroveň varování — nárůst pokrytí korozí o 15–30 % nebo progrese z Ri3 na Ri4. Inženýrské vyhodnocení stavu nátěru a integrity podkladu. Naplánovat přetření do 6–12 měsíců.
Úroveň alarmu — pokrytí korozí přesahující 30 % nebo progrese na Ri5. Okamžité vyhodnocení konstrukční kapacity. U ocelových mostních prvků posouzení ztráty průřezu pomocí ultrazvukového měření tloušťky. Naplánovat zásah do 1–3 měsíců.
Účinné upozorňování na změny pracuje na několika kaskádových úrovních, aby nedošlo k zahlcení správců infrastruktury notifikacemi a zároveň nedošlo k přehlédnutí kritických změn:
Úroveň 1 — Statistické upozornění se spouští, když velikost změny překročí statistický práh odvozený ze šumu měření. Toto je upozornění nejnižší úrovně, indikující, že pozorovaná změna je statisticky významná (přesahuje 95% interval spolehlivosti měřicího systému). Mnoho upozornění úrovně 1 se očekává při rutinním monitorování a nevyžadují okamžitou pozornost.
Úroveň 2 — Provozní upozornění se spouští, když velikost změny překročí předem definovaný práh, který zkušenost ukázala jako indikaci aktivní deteriorace vyžadující pozornost. Provozní upozornění jsou specifická pro každé aktivum a typ vady, kalibrovaná na základě historických dat deteriorace a záznamů údržby.
Úroveň 3 — Kritické upozornění se spouští, když velikost změny indikuje bezprostřední bezpečnostní riziko — rychlý růst trhliny v kritickém konstrukčním prvku, náhlé sedání mostního opěry nebo vznik odštěpku, který by mohl generovat FOD na aktivní dráze. Kritická upozornění vyžadují okamžité informování odpovědného personálu a urychlenou reakci v řádu hodin až dnů.
Rámec upozornění by měl také zahrnovat časovou konzistenci — změny, které přetrvávají nebo rostou napříč více měřickými cykly, dostávají vyšší prioritu než izolované změny, které neprogredují. Trhlina, která vykazuje růst o 0,4 mm v jednom měřicím intervalu, ale v dalším se stabilizuje, by měla být downgradována z Varování na Sledování, zatímco trhlina, která vykazuje konzistentní růst 0,3–0,5 mm v každém ze tří po sobě jdoucích měření, by měla být eskalována.
Data detekce změn poskytují empirický základ pro modely deteriorace, které predikují budoucí stavy a zbývající životnost. Integrace detekce změn s modelováním deteriorace transformuje reaktivní údržbu — opravu vad, když dosáhnou kritického stavu — na proaktivní plánování údržby založené na stavu, kde jsou zásahy plánovány na základě predikovaných trajektorií deteriorace.
Empirické křivky deteriorace jsou vyvíjeny vynesením výsledků detekce změn z více měřicích cyklů. Pro každý typ vady a konstrukční prvek je rychlost změny (růst šířky trhliny v mm/rok, růst plochy odštěpku v cm²/rok, nárůst pokrytí korozí v %/rok) vypočtena z časové řady měření. Tyto empirické rychlosti jsou pak použity k projektování budoucích stavů za předpokladu pokračující deteriorace pozorovanou rychlostí. Pro letištní vozovky je křivka deteriorace Indexu stavu vozovky (PCI) typicky modelována jako exponenciální pokles: PCI(t) = PCI_počáteční × exp(-k × t), kde k je konstanta rychlosti deteriorace odvozená z měření detekce změn napříč více měřicími cykly.
Pravděpodobnostní modely deteriorace zahrnují nejistotu jak v měření, tak v predikci. Detekce změn poskytuje nejen velikost změny, ale také interval spolehlivosti pro toto měření (z M3C2 nebo ze statistické analýzy změn). Tyto nejistoty se propagují do modelu deteriorace a vytvářejí meze spolehlivosti pro predikovaný budoucí stav. Markovův řetězec například používá data detekce změn k odhadu přechodových pravděpodobností mezi stavy, s intervaly spolehlivosti odrážejícími nejistotu měření v každém cyklu.
Predikce deteriorace pomocí strojového učení používá časovou sekvenci měření detekce změn jako příznaky pro predikci budoucího stavu. Rekurentní neuronové sítě (RNN) a sítě s dlouhou krátkodobou pamětí (LSTM) jsou zvláště vhodné pro tuto úlohu, protože se učí časové vzory přímo ze sekvence měření. Vstupní příznaky zahrnují časové řady šířky trhlin, časové řady plochy odštěpků, hodnoty PCI a environmentální kovariáty (teplotní cykly, srážky, události mrazu a tání). Výstupem modelu je predikovaný stav v budoucích časových bodech s přidruženými predikčními intervaly.
Detekce změn také umožňuje kvantitativní hodnocení účinnosti údržby prostřednictvím srovnání před a po. Když je vada opravena — trhlina utěsněna, odštěpek zalátán, koroze ošetřena — analýza detekce změn mezi měřením před opravou a prvním měřením po opravě ověří, že vada již není přítomna. Následná měření sledují, zda oprava zůstává účinná nebo zda se vada objevuje znovu.
Sledování trvanlivosti oprav v průběhu více měřicích cyklů poskytuje data o střední době do opětovného výskytu vad po různých metodách opravy. Tato data informují plánování údržby identifikací nejtrvanlivějších strategií oprav pro každý typ vady za specifických environmentálních a zatěžovacích podmínek. Pokud například detekce změn odhalí, že utěsnění trhlin na určitém úseku dráhy má medián doby recidivy 18 měsíců, zatímco drážkování a těsnění má medián doby recidivy 36 měsíců, jsou vyšší počáteční náklady drážkování a těsnění ospravedlněny prodlouženou životností.
Výkonnostně orientované smlouvy na údržbu používají data detekce změn k ověření, že dodavatelé údržby dosáhli specifikovaných výkonnostních výsledků. Smlouva může stanovit, že šířka trhliny v ošetřených oblastech nesmí po dobu nejméně 24 měsíců přesáhnout 125 % šířky po opravě. Měření detekce změn v 6, 12 a 24 měsících po opravě poskytují objektivní ověření shody, přičemž platba je vázána na prokázaný výkon, nikoli pouze na dokončení práce.
CloudCompare je primární open-source software pro detekci změn mračen bodů, implementující metody M3C2, C2C, C2M (Cloud-to-Mesh) a DOD. Podporuje formáty LAS, LAZ, PLY a další běžné formáty mračen bodů, poskytuje dávkové zpracování pro automatizované pipeline a zahrnuje vizualizační nástroje pro barevně kódované mapy změn. CloudCompare běží na Windows, macOS a Linux a je de facto standardem pro analýzu změn mračen bodů v monitorování infrastruktury.
Agisoft Metashape podporuje porovnávání ortomozik a DEM pro detekci změn prostřednictvím svého pracovního postupu pro výpočet rozdílů mezi zpracovanými projekty. Software poskytuje automatizovanou registraci snímků napříč měřeními pomocí společné sítě GCP a výsledné ortomoziky lze porovnávat pixelově nebo prostřednictvím vestavěného nástroje pro rozdíly DEM. Python API společnosti Metashape umožňuje skriptování pracovních postupů detekce změn pro dávkové zpracování více dvojic měření.
Pix4Dmapper a Pix4Dmatic zahrnují možnosti porovnávání ortomozik a DSM s automatickými reporty detekce změn, které zvýrazňují oblasti významného rozdílu nadmořské výšky. Kvalitní report Pix4D zahrnuje odhady přesnosti na úrovni pixelů, které informují o statistické významnosti detekovaných změn.
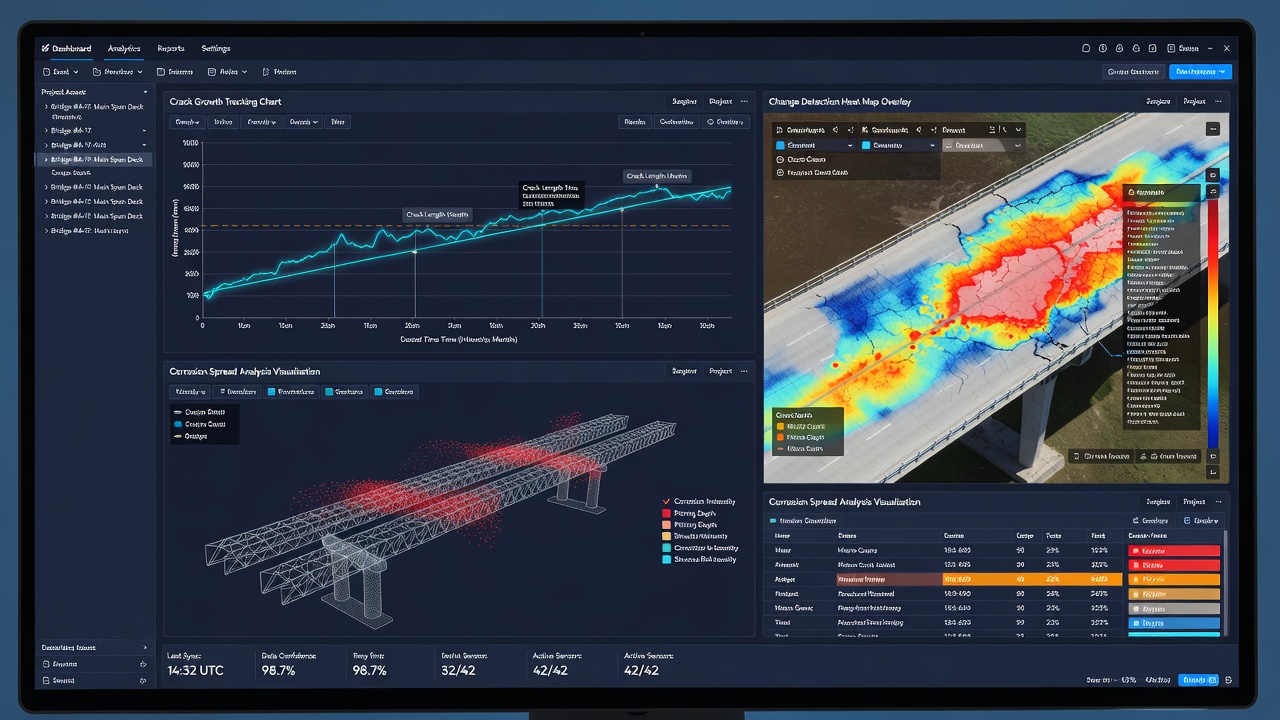
TarmacView poskytuje specializovanou detekci změn pro letištní vozovkovou infrastrukturu, porovnává ortomoziky a mapy trhlin napříč opakovanými měřeními s automatickou klasifikací změn. Platforma sleduje růst trhlin (šířku i délku), tvorbu nových trhlin, změny plochy odštěpků a trendy deteriorace PCI. Výsledky detekce změn jsou vizualizovány jako překryvné mapy na aktuální ortomozice s barevně kódovanou závažností změn a automatickým generováním upozornění pro změny přesahující konfigurovatelné prahy.
Plná automatizace detekce změn vyžaduje integrovanou pipeline, která zpracovává všechny kroky od importu dat po generování reportů:
Krok 1 — Import dat: Importovat nová data z měření (snímky, GNSS logy, souřadnice GCP) a načíst odpovídající data základního měření z databáze aktiv. Ověřit, že obě měření pokrývají stejnou oblast aktiva a splňují požadavky na kvalitu.
Krok 2 — Registrace: Provést automatizovanou registraci nové ortomoziky nebo mračna bodů k základní referenci. Pro ortomoziky použít registraci založenou na příznacích s SIFT nebo AKAZE příznaky následovanou jemnou registrací založenou na intenzitě. Pro mračna bodů aplikovat hrubou registraci pomocí GCP nebo ICP (Iterative Closest Point) následovanou jemnou registrací.
Krok 3 — Výpočet změn: Aplikovat vybranou metodu detekce změn — rozdílová analýza snímků pro změny intenzity, M3C2 pro deformaci mračna bodů, objektově orientované porovnání pro změny trhlin a odštěpků. Vypočítat statistiky změn s intervaly spolehlivosti.
Krok 4 — Klasifikace: Klasifikovat detekované změny podle typu (růst trhliny, nová trhlina, šíření odštěpku, koroze, deformace), úrovně závažnosti a prostorového umístění. Přiřadit každý objekt změny odpovídající součásti aktiva.
Krok 5 — Generování upozornění: Porovnat velikosti změn s konfigurovanými prahy pro každý typ vady a umístění. Generovat upozornění úrovně 1, 2 nebo 3 podle potřeby. Zaznamenat upozornění do systému správy aktiv s prostorovým odkazem, velikostí změny, intervalem spolehlivosti a časovým razítkem.
Krok 6 — Generování reportů: Vytvořit reporty detekce změn, které zahrnují mapy změn (překryv na aktuální ortomozice), souhrnné statistiky (celková změna délky trhlin, počet nových vad, trend PCI), detailní data změn pro jednotlivé vady (historie šířky trhliny, historie plochy odštěpku) a doporučené akce na základě úrovní upozornění.
Krok 7 — Aktualizace databáze: Aktualizovat databázi stavu aktiv o nové výsledky detekce změn. Připojit časové řady pro každou vadu a prvek aktiva. Aktualizovat křivky deteriorace o nový měřicí bod. Přepočítat predikovaný stav a zbývající životnost, pokud jsou integrovány modely deteriorace.
Automatizovaná detekce změn vyžaduje systematické zajištění kvality, aby bylo zajištěno, že hlášené změny jsou skutečné a nikoli artefakty chyb zpracování:
Kontrola kvality registrace: RMSE registrace mezi měřeními musí být pod projektovým prahem (typicky 0,5 pixelu pro ortomoziky, 0,5 cm pro mračna bodů). Pokud je kvalita registrace nedostatečná, jsou výsledky detekce změn označeny pro manuální revizi.
Screening falešně pozitivních výsledků: Výsledky detekce změn jsou prověřovány proti známým indikátorům nezměněnosti: oblasti stojaté vody (detekované pomocí blízké infračervené nebo termální snímky), oblasti nedávné údržby (zaznamenané v systému správy aktiv) a oblasti se známou povrchovou kontaminací (úniky oleje, nahromadění gumy na dráhách).
Kontrola časové konzistence: Změny, které se objeví v jednom měřicím intervalu, ale nejsou potvrzeny v následujících měřeních, jsou označeny jako potenciálně přechodné — povrchové skvrny, které se smyjí, vlhkostní vzory, které se mění s počasím, nebo nečistoty, které jsou odstraněny. Přetrvávající změny dostávají vyšší hodnocení spolehlivosti.
Vzorek manuální revize: Statisticky platný vzorek detekovaných změn je pro každý měřicí cyklus přezkoumán kvalifikovaným inspektorem. Velikost vzorku je vypočtena tak, aby bylo dosaženo 95% spolehlivosti, že míra falešně pozitivních výsledků automatizovaného systému je pod přijatelným prahem (typicky 5–10 % pro upozornění úrovně sledování, 1–2 % pro upozornění úrovně alarmu).
Detekce změn transformuje inspekci infrastruktury ze statického snímku stavu do dynamického časového záznamu deteriorace, oprav a konstrukčního chování. Přesnou koregistrací snímků a mračen bodů z opakovaných měření kvantifikuje detekce změn jemnou, milimetrovou progresi trhlin, odštěpků, koroze a deformací, které by byly v jedné inspekci neviditelné, ale akumulované v čase určují životnost aktiva.
Metodika integruje rigorózní geometrickou registraci — založenou na příznacích, intenzitě nebo georeferencovanou pomocí GCP — se statistickou analýzou změn, která odděluje skutečnou deterioraci od šumu měření. Výběr metody detekce změn závisí na typu vady a požadované citlivosti: rozdílová analýza snímků pro změny vzhledu povrchu, M3C2 pro deformaci mračna bodů, objektově orientované porovnání pro změny geometrie trhlin a odštěpků a metody strojového učení pro automatickou klasifikaci s vysokou přesností.
Pro letištní vozovky, mosty a kritickou infrastrukturu poskytuje detekce změn datový základ pro údržbu založenou na stavu, modelování deteriorace a alokaci rozpočtu na základě rizika. Umožňuje správcům infrastruktury identifikovat akcelerující deterioraci dříve, než dosáhne kritických úrovní, ověřit účinnost údržbových zásahů a optimalizovat načasování a rozsah opravných činností. Integrace detekce změn s automatizovanými zpracovatelskými pipeline, rámci upozornění a modely deteriorace vytváří systém řízení stavu s uzavřenou smyčkou, který neustále zlepšuje kvalitu rozhodování o údržbě prostřednictvím empirických důkazů o rychlostech deteriorace a trvanlivosti oprav.
TarmacView implementuje detekci změn jako klíčovou schopnost své platformy pro inspekci letištních vozovek, umožňující automatizované sledování růstu trhlin, šíření odštěpků a trendů stavu v rámci po sobě jdoucích průzkumů dronem. Platforma aplikuje rigorózní registraci a statistickou kontrolu kvality, aby zajistila, že hlášené změny jsou skutečné a akční, a poskytuje správcům infrastruktury kvantitativní důkazy pro plánování údržby a reportování shody podle norem ICAO Annex 14 a ASTM D5340.
TarmacView umožňuje automatizovanou detekci změn při opakovaných průzkumech letištních vozovek, mostů a infrastruktury pomocí dronů. Sledujte růst trhlin, zvětšování odštěpků a trendy deteriorace s kvantitativní přesností. Identifikujte změny včas a optimalizujte plánování údržby.
Degradace označuje jakékoliv snížení kvality, výkonu nebo integrity systému či produktu. V letectví i dalších odvětvích má degradace dopad na bezpečnost, spoleh...
Detekce trhlin na bázi AI využívá počítačové vidění — konvoluční neuronové sítě, vision transformery a modely sémantické segmentace — k automatické identifikaci...
Komplexní slovník zahrnující klíčové pojmy a procesy spojené s posuzováním škod, hodnocením rozsahu poškození a údržbou, včetně průmyslových standardů, reportov...