+++
title = “Překryv snímků”
description = “Překryv snímků (podélný a příčný překryv) je procento plochy snímku, které je sdíleno mezi po sobě jdoucími a sousedními fotografiemi ve fotogrammetrickém měření. Typické požadavky jsou 75–80 % podélného překryvu a 60–70 % příčného překryvu pro mapování a inspekci infrastruktury.”
keywords = [“překryv snímků”, “podélný překryv”, “příčný překryv”, “fotogrammetrický překryv”, “letecký překryv”, “dronový překryv”, “procento překryvu”, “požadavek na překryv”, “podélný přesah”, “příčný přesah”, “inspekce překryvu”]
shortDescription = “Překryv snímků je procento sdílené plochy mezi po sobě jdoucími (podélný překryv) a sousedními (příčný překryv) leteckými snímky. Je to jediný nejdůležitější parametr určující kvalitu 3D rekonstrukce ve fotogrammetrii.”
glossaryDescription = “Překryv snímků ve fotogrammetrii označuje procento redundantní plochy snímku sdílené mezi po sobě jdoucími fotografiemi pořízenými podél letové dráhy a mezi fotografiemi v sousedních letových liniích. Podélný překryv (také nazývaný podélný přesah nebo překryv podél dráhy) je překryv mezi po sobě jdoucími snímky ve směru letu. Příčný překryv (také nazývaný boční nebo laterální překryv) je překryv mezi snímky v sousedních letových pásech. Adekvátní překryv snímků zajišťuje, že každý bod na zemi je zachycen z více pozic kamery, což je základní požadavek pro automatizovanou 3D rekonstrukci pomocí Structure from Motion (SfM), generování hustého mračna bodů a tvorbu ortofotomozaiček.”
showCTA = true
ctaHeading = “Potřebujete profesionální leteckou inspekci?”
ctaDescription = “TarmacView poskytuje expertní dronové fotogrammetrické služby s optimalizovaným překryvem snímků pro inspekci vozovek, infrastruktury a letištního majetku. Kontaktujte nás pro návrh zakázkového měření.”
ctaPrimaryText = “Kontaktujte nás”
ctaPrimaryURL = “/contact/”
ctaSecondaryText = “Domluvit demo”
ctaSecondaryURL = “/demo/”
[[faq]]
question = “Co je překryv snímků ve fotogrammetrii?”
answer = “Překryv snímků ve fotogrammetrii je procento plochy sdílené mezi dvěma nebo více leteckými snímky. Vyjadřuje se dvěma parametry: podélný překryv (podélný přesah) — překryv mezi po sobě jdoucími snímky ve směru letu, a příčný překryv (boční přesah) — překryv mezi snímky v sousedních letových liniích. Pro spolehlivou 3D rekonstrukci je standardem podélný překryv 75–85 % a příčný překryv 60–70 %. Každý bod na zemi se musí objevit alespoň na třech snímcích pro přesnou triangulaci.”
[[faq]]
question = “Jaký je rozdíl mezi podélným a příčným překryvem?”
answer = “Podélný překryv (podélný přesah / překryv podél dráhy) je procento překryvu mezi dvěma po sobě jdoucími snímky pořízenými podél stejné letové linie. Obvykle se nastavuje na 75–85 % pro fotogrammetrii. Příčný překryv (boční / laterální / příčný přesah) je překryv mezi snímky ze sousedních letových linií v misi s mřížkovým letem, obvykle nastavovaný na 60–70 %. Podélný překryv zajišťuje, že každý bod podél letové dráhy je zachycen na více po sobě jdoucích snímcích, zatímco příčný překryv zajišťuje pokrytí napříč šířkou měřené oblasti bez mezer mezi letovými pásy.”
[[faq]]
question = “Jaký je doporučený překryv snímků pro mapování dronem?”
answer = “Doporučený překryv snímků pro fotogrammetrické mapování dronem je 75–85 % podélného překryvu a 60–75 % příčného překryvu. Pro členitý terén, městské oblasti s vysokými budovami nebo vysoce přesné 3D modelování zvyšte podélný překryv na 85–90 % a příčný překryv na 70–80 %. Pro jednoduchý rovinatý terén a základní tvorbu ortofotomozaiček mohou postačovat minima 60 % podélného a 30 % příčného překryvu, ačkoli to riskuje selhání rekonstrukce.”
[[faq]]
question = “Co se stane, když je překryv snímků příliš nízký?”
answer = “Nedostatečný překryv snímků způsobuje mezery v pokrytí mračnem bodů, selhání párování spojovacích bodů, sníženou přesnost modelu a oblasti, kde fotogrammetrický software nedokáže rekonstruovat 3D geometrii. Na rovných nebo málo texturovaných površích, jako je vozovka, způsobuje nízký překryv „krvácení” okrajů a díry v ortofotomozaičce. Pod 60 % podélného překryvu riziko úplného selhání rekonstrukce výrazně narůstá, zejména na uniformních površích s málo výraznými prvky."
[[faq]]
question = “Co se stane, když je překryv snímků příliš vysoký?”
answer = “Nadměrný překryv (nad 90 % podélný nebo 80 % příčný) zvyšuje dobu letu, počet snímků, spotřebu baterie, dobu zpracování a požadavky na úložiště bez proporcionálního zlepšení přesnosti. Zpracování měření s 95% překryvem namísto 80 % může zvýšit dobu zpracování o 300–500 % při méně než 5% zlepšení přesnosti. Další snímky vnášejí redundantní data, která zpomalují každou fázi fotogrammetrického pipeline bez smysluplného přínosu.”
[[faq]]
question = “Jaký je minimální překryv pro fotogrammetrické zpracování?”
answer = “Absolutní minimum podélného překryvu pro fotogrammetrii je 60 %, přičemž většina fotogrammetrických softwarů vyžaduje alespoň 70 % pro spolehlivé zpracování. Pod 60 % se párování spojovacích bodů stává nespolehlivým a software není schopen konzistentně triangulovat pozice kamery. Minimální příčný překryv je 30 %, i když 60 % je silně doporučeno. Tato minima se liší podle textury povrchu — vzorované nebo texturované povrchy mohou fungovat při nižším překryvu, zatímco uniformní povrchy, jako je asfalt, vyžadují vyšší překryv.”
[[faq]]
question = “Jak výška letu ovlivňuje překryv snímků?”
answer = “Procento překryvu snímků se vypočítává na základě pozemního pokrytí každého snímku, které se zvyšuje s výškou. Software pro plánování letu však vypočítává překryv na základě výšky nad úrovní terénu (AGL). Při letu nad terénem s proměnlivou nadmořskou výškou nebo vysokými stavbami může být skutečný překryv na úrovni terénu výrazně menší, než bylo plánováno. Například let plánovaný ve výšce 100 m AGL se 75% překryvem bude mít menší skutečný překryv nad 30 m vysokou budovou, protože vzdálenost kamery od budovy je pouze 70 m.”
[[faq]]
question = “Jak se vypočítává překryv snímků?”
answer = “Procento překryvu snímků se vypočítává jako: Překryv (%) = (1 - (vzdálenost mezi středy snímků / rozměr stopy snímku)) × 100. Pro podélný překryv se používá rozměr stopy snímku ve směru letu. Pro příčný překryv je to rozměr stopy snímku napříč směrem letu. V praxi software pro plánování letu tento výpočet automatizuje. Interval spouštění kamery a rychlost letu se nastavují tak, aby bylo dosaženo požadovaného podélného překryvu, zatímco vzdálenost mezi letovými liniemi nastavuje příčný překryv.”
[[faq]]
question = “Jaký překryv je potřeba pro inspekci mostů?”
answer = “Inspekce mostů dronem vyžaduje vyšší překryv než standardní mapování kvůli složité geometrii a potřebě detekovat malé vady, jako jsou praskliny. Doporučený překryv pro fotogrammetrii mostů je 80–85 % podélný a 70–80 % příčný pro palubu mostu. U vertikálních prvků (nosníky, opěry, pilíře) se používají orbitální lety s šikmými snímky s překryvem 70–80 %. Výzkum Federálního úřadu pro dálnice (FHWA) ukazuje, že 80% podélný překryv se 70% příčným překryvem vytváří kompletní 3D modely mostů vhodné pro detekci trhlin o šířce až 0,3 mm.”
[[faq]]
question = “Jak mohu překryv ověřit po letu dronem?”
answer = “Ověření překryvu po letu lze provést prohlídkou stop snímků v softwaru pro plánování letu (DroneDeploy, Pix4Dcapture, UGCS) nebo kontrolou zprávy o kvalitě fotogrammetrie po zpracování. Většina fotogrammetrických softwarů (Agisoft Metashape, Pix4Dmapper, DJI Terra) generuje zprávu o kvalitě zobrazující pozice kamer, rozložení spojovacích bodů a oblasti slabé rekonstrukce. Vizuální kontrola ortofotomozaičky na švy, duchování nebo mezery také odhalí problémy s překryvem. Varovné signály zahrnují oblasti s méně než 3 překrývajícími se snímky nebo vysokou reprojekční chybou.”
+++
Překryv snímků je procento celkové plochy snímku sdílené mezi dvěma nebo více po sobě jdoucími leteckými snímky. Je to jediný nejdůležitější akviziční parametr ve fotogrammetrii, který přímo určuje, zda automatizovaná 3D rekonstrukce uspěje nebo selže. Bez dostatečného překryvu nemohou algoritmy Structure from Motion (SfM) najít spolehlivé spojovací body mezi snímky, nelze triangulovat pozice kamer a výsledné mračno bodů nebo ortofotomozaička obsahuje mezery, deformace a chyby měření.
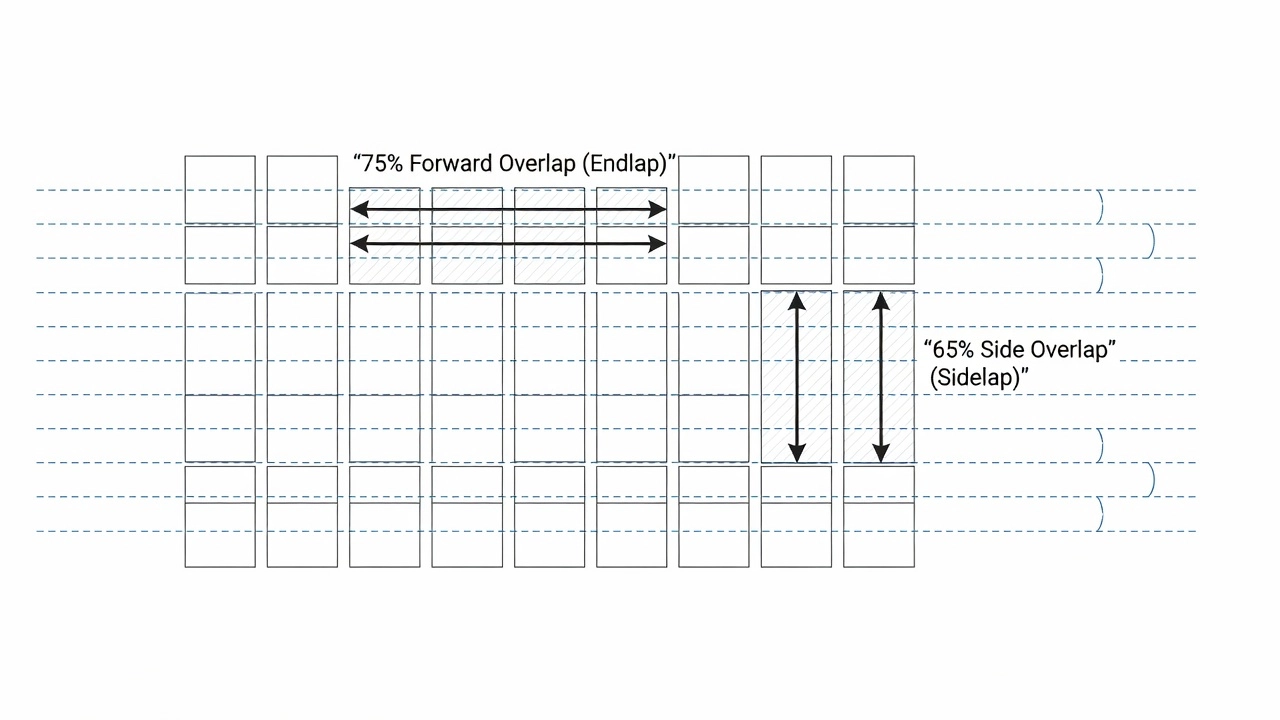
Překryv se vyjadřuje jako dva nezávislé parametry: podélný překryv (také nazývaný podélný přesah nebo překryv podél dráhy), což je překryv mezi po sobě jdoucími snímky ve směru letu, a příčný překryv (také nazývaný boční přesah, laterální překryv nebo překryv napříč dráhou), což je překryv mezi snímky v sousedních letových liniích letících vedle sebe. Oba parametry musí být nezávisle nakonfigurovány v softwaru pro plánování letu a jsou ovlivněny výškou letu, geometrií senzoru kamery, rychlostí nad zemí a intervalem spouštění kamery.
Matematický princip, který je základem překryvu snímků, je fotogrammetrický požadavek, že každý bod na zemi musí být viditelný alespoň na dvou, a ideálně na třech nebo více snímcích z různých pozic kamery. Tato multiview geometrie umožňuje triangulaci pomocí epipolárních linií — jádro automatizované fotogrammetrie — kde jsou 3D souřadnice libovolného bodu vypočteny nalezením jeho odpovídající polohy pixelu na více překrývajících se snímcích a řešením průsečíku paprsků z každé pozice kamery přes tento pixel.
Definice podélného překryvu (podélného přesahu)
Podélný překryv je procento plochy snímku, které je sdíleno mezi dvěma po sobě jdoucími snímky pořízenými postupně podél jedné letové linie. Vyjadřuje se jako procento podélného rozměru snímku (rozměru stopy snímku ve směru letu). Pokud po sobě jdoucí snímky sdílejí 80 % své podélné plochy, podélný překryv je 80 %.
Podélný překryv určuje, kolikrát bude daný bod na zemi podél letové dráhy vyfotografován. Při 80% podélném překryvu se každý bod na zemi objeví na každém snímku, jehož pozice tento bod pokrývá — typicky 5 až 7 snímků pro jednu letovou linii. Tato multiplicita je nezbytná pro spolehlivé párování spojovacích bodů: SfM pipeline potřebuje alespoň tři pozorování každého spojovacího bodu, aby přesně vyřešila polohu a orientaci kamery, a další pozorování zlepšují redundanci, která pohání přesnost.
Podélný překryv je také označován jako podélný přesah v tradiční letecké fotogrammetrické literatuře. Termín „podélný přesah" pochází z éry analogových leteckých filmových kamer montovaných na pilotovaná letadla, kde byl filmový pás z jednoho letového úseku fyzicky překrýván konci pro stereoskopické prohlížení. Termín přetrvává v moderní digitální fotogrammetrii, ačkoli „podélný překryv" a „překryv podél dráhy" jsou pro provoz dronů výstižnější.
Výpočet podélného překryvu závisí na třech parametrech: rozměr pozemní stopy snímku ve směru letu, rychlost letu nad zemí a interval spouštění kamery. Pro libovolnou danou stopu snímku (určenou výškou letu a zorným polem kamery) stanovuje požadovaný podélný překryv maximální přípustnou vzdálenost mezi po sobě jdoucími pozicemi kamery:
D_max = L × (1 — O_f / 100)
Kde D_max je maximální vzdálenost mezi po sobě jdoucími stanovišti expozice, L je délka stopy snímku ve směru letu a O_f je požadované procento podélného překryvu. Pro stopu snímku 100 m podél dráhy a požadovaný podélný překryv 80 % musí kamera spouštět každých 20 m pohybu vpřed.
Definice příčného překryvu (bočního přesahu)
Příčný překryv je procento plochy snímku sdílené mezi snímky v sousedních letových liniích. Vyjadřuje se jako procento příčného rozměru snímku (rozměru stopy snímku kolmého na směr letu). Pokud snímky ze dvou sousedních letových linií sdílejí 65 % své boční plochy, příčný překryv je 65 %.
Příčný překryv je také nazýván boční přesah, laterální překryv nebo překryv napříč dráhou. V tradiční fotogrammetrii byl boční přesah překryvem mezi sousedními filmovými pásy v mapovacím bloku. Při provozu dronů je příčný překryv překryvem mezi dvěma rovnoběžnými letovými liniemi v misi s mřížkovým letem.
Příčný překryv určuje, zda mezi letovými liniemi vzniknou mezery v pokrytí. Při 60% příčném překryvu se okraje efektivního pokrytí z jedné letové linie překrývají s okraji z následující o 60 % příčného rozměru snímku, což zajišťuje souvislé pokrytí přes celou šířku měřené oblasti. Pod 30 % příčného překryvu se pokrytí mezi letovými liniemi stává nesouvislým, čímž vznikají skutečné mezery ve snímcích, kde neexistují žádná data.
Rozestup mezi letovými liniemi se vypočítává z požadavku na příčný překryv:
S = W × (1 — O_s / 100)
Kde S je rozestup mezi sousedními letovými liniemi, W je šířka stopy snímku napříč směrem letu a O_s je požadované procento příčného překryvu. Pro stopu snímku 150 m napříč dráhou a požadovaný příčný překryv 65 % musí být letové linie vzdáleny 52,5 m od sebe.
Parametr
Podélný překryv (podélný přesah)
Příčný překryv (boční přesah)
Směr
Podél letové dráhy
Mezi sousedními letovými liniemi
Typická hodnota
75–85 %
60–75 %
Minimum pro spolehlivost
70 %
30 %
Dopad na dobu letu
Vyšší překryv = více snímků na letovou linii
Vyšší překryv = více letových linií
Primární účinek
Zajišťuje pokrytí podél každého letového pásu
Zajišťuje pokrytí napříč šířkou měření
Klíčové proměnné
Rychlost letu, interval spouštění, výška
Rozestup letových linií, výška, šířka senzoru
Překryv snímků v Structure from Motion
Structure from Motion (SfM) je výpočetní jádro, které pohání moderní digitální fotogrammetrii. Algoritmy SfM zpracovávají překrývající se 2D snímky, aby současně rekonstruovaly pozice kamer, orientace kamer a 3D geometrii scény. Překryv snímků je základní předpoklad, bez kterého SfM nemůže fungovat.
Pipeline SfM začíná detekcí příznaků — algoritmy jako SIFT (Scale-Invariant Feature Transform), SURF (Speeded-Up Robust Features) nebo AKAZE identifikují výrazné body v každém snímku, jako jsou rohy, hrany a texturní oblasti. Tyto příznaky musí být robustní, což znamená, že je lze spolehlivě detekovat bez ohledu na změny osvětlení, rozdíly v měřítku a malé posuny perspektivy mezi snímky. Hustota a detekovatelnost těchto příznaků závisí na textuře povrchu — tráva, štěrk a značení vozovek produkují bohaté příznaky, zatímco uniformní asfalt, sněhová pokrývka a vodní hladiny produkují jen velmi málo příznaků.
Další fází je párování příznaků, kdy software hledá odpovídající příznaky napříč dvojicemi snímků. Zde je překryv kritický: pokud se dva snímky nepřekrývají, nesdílejí žádnou plochu terénu, a proto mezi nimi nelze párovat žádné příznaky. I když se snímky překrývají, míra úspěšnosti párování závisí na procentu překryvu. Výzkum ukazuje, že míra úspěšnosti párování prudce klesá pod 60 % podélného překryvu. Při 80% překryvu jsou typické míry párování mezi sousedními snímky 1000–5000 spojovacích bodů na dvojici snímků. Při 50% překryvu to klesá na 100–500 spojovacích bodů a pod 40 % spolehlivé párování často zcela selhává.
Třetí fází je odhad pozice kamery prostřednictvím vyrovnání svazku. Software řeší polohu (X, Y, Z) a orientaci (klon, sklon, pootočení) každé kamery v okamžiku expozice, spolu s 3D souřadnicemi každého spárovaného spojovacího bodu. Jedná se o nelineární optimalizační problém metodou nejmenších čtverců a kvalita řešení kriticky závisí na dvou faktorech: počtu snímků, ve kterých se každý spojovací bod vyskytuje, a geometrické konfiguraci těchto snímků.
Pravidlem ve fotogrammetrii je, že každý bod na zemi by se měl objevit alespoň na třech snímcích pro spolehlivou rekonstrukci. Při 80% podélném překryvu a 65% příčném překryvu se každý bod v centrální části mřížkového měření objevuje na 6–12 snímcích, což poskytuje silná geometrická omezení. Snížení na 60% podélný a 40% příčný překryv snižuje toto číslo na 3–5 snímků na bod, přičemž body poblíž okrajů měření se objevují pouze na 2–3 snímcích — minimální hranice spolehlivosti.
Multi-View Stereo (MVS) — fáze hustého párování, která následuje po SfM — je na překryv ještě citlivější. Zatímco SfM potřebuje pouze párovat řídké příznaky, MVS se snaží vytvořit odhad hloubky pro každý pixel, čímž vzniká husté mračno bodů o milionech bodů. Algoritmy MVS vyhodnocují fotometrickou konzistenci malých oblastí snímku napříč více pohledy a kvalita těchto odhadů hloubky se zlepšuje s počtem překrývajících se pohledů. Oblasti snímané pouze 2–3 kamerami vykazují zašuměné, neúplné hloubkové mapy, zatímco oblasti snímané 5+ kamerami produkují čisté, kompletní rekonstrukce.
Typické požadavky na překryv
Standardní požadavky na překryv pro dronovou fotogrammetrii byly stanoveny desetiletími fotogrammetrické praxe a potvrzeny rozsáhlým akademickým výzkumem. Níže uvedené hodnoty představují obecná doporučení platná pro většinu měřických scénářů.
Pro tvorbu ortofotomozaiček — vytvoření bezešvé, geometricky korigované letecké mapy — je minimální podélný překryv 60 % a minimální příčný překryv 30 %. To jsou absolutní dolní hranice, pod kterými fotogrammetrický software není schopen vytvořit souvislou ortofotomozaičku bez viditelných švů nebo mezer. Většina odborníků však doporučuje 75–85% podélný a 60–70% příčný překryv pro profesionální ortofotomozaičky. Vyšší hodnoty poskytují redundanci potřebnou pro přesnou ortorektifikaci, která koriguje polohu každého pixelu na základě nadmořské výšky terénu a perspektivy kamery.
Pro generování 3D mračna bodů — vytvoření detailního, měřitelného 3D modelu povrchu — jsou požadavky přísnější. Podélný překryv 75–85 % a příčný překryv 60–75 % jsou standardem. Extra překryv zajišťuje, že každý bod na zemi je snímán z alespoň 5–8 různých pozic kamery, což poskytuje geometrickou rozmanitost potřebnou pro přesný odhad hloubky ve fázi hustého párování.
Pro vysoce přesné geodetické zaměření — kde jsou požadovány měřické přesnosti 1–3 cm — se doporučuje podélný překryv 80–85 % a příčný překryv 70–80 %. Při těchto úrovních překryvu má fotogrammetrická síť dostatečnou redundanci ke kompenzaci chyb GPS polohování, náklonu kamery způsobeného větrem a dalších zdrojů nejistoty. Akademický výzkum publikovaný v časopise Remote Sensing konzistentně ukazuje, že zvýšení překryvu ze 70 % na 80 % zlepšuje vertikální přesnost o 25–40 %, zatímco zvýšení nad 85 % vykazuje klesající výnosy.
Pro inspekci infrastruktury — mostní paluby, povrchy vozovek, posouzení stavu ranvejí — je standardem podélný překryv 80–85 % a příčný překryv 70–80 %. Vyšší překryv zajišťuje, že malé povrchové vady (trhliny, výtluky, poruchy spár) jsou viditelné na více snímcích z více úhlů, což zlepšuje míru detekce a přesnost měření.
Aplikace
Podélný překryv
Příčný překryv
Odůvodnění
Ortofotomozaička
75–80 %
60–65 %
Bezešvá tvorba map
3D model (standard)
75–80 %
60–70 %
Kompletní rekonstrukce povrchu
Vysoce přesné zaměření
80–85 %
70–80 %
Přesnost v řádu sub-centimetrů
Inspekce vozovek
80–85 %
70–75 %
Detekce trhlin od 0,3 mm
Inspekce mostní paluby
80–85 %
70–80 %
Identifikace konstrukčních vad
Mapování měst
85–90 %
70–80 %
Rekonstrukce budov
Zemědělství/NDVI
70–75 %
55–65 %
Efektivní pokrytí polí
Mapování velkých oblastí
70–75 %
55–60 %
Rovnováha pokrytí a doby letu
Důsledky nedostatečného překryvu
Provoz pod doporučenými prahovými hodnotami překryvu vytváří kaskádu negativních účinků, které degradují nebo ničí fotogrammetrický výstup.
Mezery v rekonstrukci — nejviditelnější příznak nedostatečného překryvu. Když dva sousední snímky nesdílejí dostatek plochy terénu, algoritmus SfM nemůže najít spojovací body mezi nimi a rekonstrukce této oblasti zcela selže. Ve výsledném mračnu bodů nebo ortofotomozaičce se tyto mezery projevují jako díry nebo chybějící data. V závažných případech se celý blok snímků nepodaří sjednotit do jediného koherentního modelu a roztříští se do nespojených shluků.
Selhání párování spojovacích bodů — nastává, když je překrývající se oblast mezi dvěma snímky příliš malá na to, aby obsahovala dostatek výrazných příznaků. Na uniformních površích, jako je asfalt nebo beton, nemusí ani 60% překryv poskytnout dostatek párovacích bodů, protože povrch postrádá texturu. Na takových površích může být nutný 80% nebo vyšší překryv k nalezení dostatečného množství příznaků pro spolehlivé párování.
Snížená polohová přesnost — i když rekonstrukce uspěje při mezních úrovních překryvu, přesnost výsledku je ohrožena. Každé měření z mračna bodů nebo ortofotomozaičky nese větší nejistotu. Akademický výzkum dokazuje, že snížení podélného překryvu z 80 % na 60 % zvyšuje šum mračna bodů přibližně o 50 % a snižuje horizontální přesnost o 25–40 %.
Špatná kvalita okrajů — nedostatečný překryv na hranicích měřené oblasti způsobuje okraje ortofotomozaičky s viditelnou deformací, liniemi švů a nesouosostí. Nejkrajnější snímky postrádají úplnou sadu sousedních pohledů, které poskytují geometrická omezení, což je činí náchylnějšími k chybám polohování.
Zvýšená reprojekční chyba — v řešení vyrovnání svazku se reprojekční chyba (průměrná vzdálenost mezi promítnutou polohou spojovacího bodu ve snímku a jeho pozorovanou polohou) zvyšuje. Vyšší reprojekční chyba indikuje horší řešení s menší vnitřní konzistencí. Ačkoli je určitá reprojekční chyba nevyhnutelná, hodnoty výrazně nad 0,5 pixelu indikují slabé geometrické řešení.
Selhání odhadu hloubky — fáze Multi-View Stereo vyžaduje alespoň 3 překrývající se pohledy (a nejlépe 5+) pro každý pixel, aby vytvořila spolehlivý odhad hloubky. Při nedostatečném překryvu budou mít velké oblasti snímku odhady hloubky, které jsou zašuměné, neúplné nebo zcela chybějící, což vytváří díry v hustém mračnu bodů.
Důsledky nadměrného překryvu
I když je více překryvu obecně lepší než méně, nadměrný překryv přináší významné náklady, které musí být vyváženy proti marginálním přínosům v přesnosti.
Zvýšená doba letu — vyšší překryv znamená více snímků na jednotku plochy, což vyžaduje více letových linií, více spouštění kamery a delší celkovou dobu mise. Zvýšení podélného překryvu z 75 % na 90 % přibližně zdvojnásobuje počet snímků na letovou linii. Pro misi, která by při 75% překryvu trvala 20 minut, by při 90% překryvu trvala přibližně 35–40 minut, což by potenciálně vyžadovalo další baterii.
Zvýšené nároky na úložiště — více snímků spotřebovává více úložného prostoru na paměťové kartě dronu a na zpracovatelském počítači. Měření, které při 75% překryvu produkuje 500 snímků, může při 90% překryvu produkovat 1500 snímků. Při 20 MB na snímek (typické pro 20 MP senzor) je to rozdíl mezi 10 GB a 30 GB úložiště.
Exponenciální nárůst doby zpracování — výpočetní náklady fotogrammetrického zpracování nerostou lineárně s počtem snímků. Fáze párování SfM porovnává každý snímek s každým dalším snímkem, který by se s ním mohl překrývat. Při 75% překryvu s 500 snímky uspořádanými v pravidelné mřížce se každý snímek překrývá s přibližně 12–16 sousedy, což vytváří zhruba 5000 dvojic snímků k párování. Při 90% překryvu se každý snímek překrývá s 30–40 sousedy, což vytváří 15 000–20 000 dvojic snímků. Doba zpracování roste úměrně počtu dvojic snímků, takže měření s 90% překryvem se zpracovává 3–5× pomaleji než měření s 75% překryvem.
Data bez přínosu — nad přibližně 85 % podélného a 75 % příčného překryvu poskytuje další překryv zanedbatelné zlepšení kvality rekonstrukce. Řešení SfM je již dobře omezeno stávající geometrií snímků a přidání redundantních pohledů nepřináší žádné nové geometrické informace. Další snímky pouze duplikují stávající pozorování, čímž zvyšují výpočetní zátěž bez smysluplného zlepšení přesnosti.
Úroveň překryvu
Snímků na jednotku plochy
Relativní doba zpracování
Zlepšení přesnosti oproti výchozí 75/65
75%/65 %
1× (výchozí)
1× (výchozí)
—
80%/70 %
1,3×
1,5×
+15–20 %
85%/75 %
2×
3×
+25–35 %
90%/80 %
3,5×
5×
+30–40 %
95%/85 %
8×
15×
+32–42 %
Data jasně ukazují klesající výnosy: zlepšení přesnosti z 85% na 95% překryv je méně než 10 %, zatímco výpočetní náklady rostou 5×. Praktické optimum pro většinu aplikací leží na 75–85 % podélném a 60–75 % příčném překryvu.
Překryv pro inspekci vozovek a ranvejí
Inspekce vozovek dronem vyžaduje specializované úvahy o překryvu kvůli jedinečným charakteristikám povrchů vozovek: velké uniformní oblasti s nízkou texturou, vysokou odrazivostí a potřebou detekovat malé povrchové vady.
Výzva nízké textury. Asfaltové a betonové povrchy vozovek mají omezenou vizuální texturu — postrádají trávu, štěrk, půdu a vegetaci, které poskytují bohaté spojovací body v průzkumech přírodního terénu. Algoritmus SfM má méně příznaků k párování mezi překrývajícími se snímky, což ztěžuje spolehlivé vyrovnání. Vyšší překryv to kompenzuje tím, že poskytuje větší potenciální plochu pro párování, čímž zvyšuje pravděpodobnost, že redukovaná sada příznaků stále najde dostatečné korespondence.
Doporučený překryv pro vozovky. Pro inspekci vozovek je standardem podélný překryv 80–85 % a příčný překryv 70–75 %. Tato vyšší výchozí hodnota zajišťuje spolehlivou rekonstrukci i na těch nejuniformějších površích vozovek. Některé organizace specifikují 85% podélný překryv pro inspekce ranvejí, aby zajistily, že každý metr čtvereční povrchu vozovky je zachycen alespoň na 7–9 snímcích.
Požadavky na detekci trhlin. Minimální detekovatelná šířka trhliny v ortofotomozaičce je přibližně 2–3násobek velikosti pixelu na zemi (GSD). Při GSD 1 cm (typické pro inspekci vozovek ve výšce 60–80 m) lze rozlišit trhliny široké až 2–3 mm. Přesné měření šířky trhliny však vyžaduje, aby byla trhlina viditelná na více překrývajících se snímcích, aby se zprůměroval šum na úrovni pixelů a perspektivní efekty. Vyšší překryv poskytuje větší redundanci měření a zlepšuje přesnost měření šířky trhliny.
Průzkumy indexu stavu vozovky (PCI). Norma ASTM D5340 pro hodnocení indexu stavu vozovky vyžaduje, aby inspektoři identifikovali a kvantifikovali typy povrchových poškození včetně trhlin, vyjetých kolejí, rozpadání, záplat a výtluků. Dronové PCI průzkumy využívající snímky s vysokým překryvem mohou dosáhnout 90–95% shody s pozemními průzkumy v identifikaci poškození, s podstatně rychlejším sběrem dat a kompletní fotografickou dokumentací.
Detekce cizích předmětů na ranvejích. Detekce cizích předmětů (FOD) na letištních ranvejích vyžaduje GSD 5 mm nebo jemnější a vysoký překryv pro zajištění úplného pokrytí. Podélný překryv 85–90 % a příčný překryv 75–80 % je typický pro FOD průzkumy. Při těchto parametrech vyžaduje standardní průzkum ranveje několik set snímků na kilometr délky ranveje. Vysoký překryv zajišťuje, že i malé předměty (matice, šrouby, úlomky pneumatik) jsou zachyceny na více snímcích, což snižuje pravděpodobnost přehlédnutí.
Překryv pro inspekci mostů
Inspekce mostů dronem představuje jedinečné výzvy týkající se překryvu kvůli složité 3D geometrii mostních konstrukcí. Typický most zahrnuje palubu, nosníky, ložiska, opěry, pilíře a nájezdové desky — každý vyžaduje jinou strategii překryvu.
Paluba mostu. Mostní paluba — povrch vozovky mostu — se zaměřuje pomocí standardních nadirových snímků s 80–85% podélným překryvem a 70–80% příčným překryvem. Paluba je obvykle nejsnadnější částí mostu ke snímání, protože dron může létat přímo nad ní v mřížkovém vzoru. Vyšší překryv oproti standardnímu mapování je nutný, protože mostní paluby mají často kovové povrchy, dilatační spáry a další prvky s nízkou texturou, které snižují počet dostupných spojovacích bodů.
Nosníky a spodní strana. Nosníky a spodní strana mostní paluby vyžadují šikmé nebo horizontální úhly kamery, typicky létané v orbitálních vzorech pod nebo vedle mostu. Pro tyto úhly snímání se doporučuje podélný překryv 70–80 %, přičemž je třeba uznat, že geometrie orbitálních letů ztěžuje dosažení konzistentního překryvu. Složitá geometrie trámů a nosníků vytváří okluze a paralaktické posuny, které komplikují párování příznaků, takže dodatečný překryv pomáhá zajistit spolehlivou rekonstrukci.
Ložiska a pilíře. Mostní ložiska — mechanické sestavy, které přenášejí zatížení mezi nosnou konstrukcí a spodní stavbou — vyžadují blízkou inspekci s velmi vysokým překryvem. Pro inspekci ložisek jsou snímky pořizovány zblízka (3–10 m) s 80–90% podélným překryvem, aby byl každý povrch ložiska zachycen z více úhlů. Vady ložisek (koroze, praskání, posun) jsou často malé a vyžadují podrobnou multiperspektivní dokumentaci.
Výzkumná zjištění FHWA. Výzkum publikovaný Federálním úřadem pro dálnice (FHWA) a v časopisech jako Remote Sensing systematicky vyhodnotil požadavky na překryv pro fotogrammetrii inspekce mostů. Studie z roku 2022 zjistila, že 80% podélný překryv se 70% příčným překryvem vytvořil kompletní 3D modely mostů s hustotami mračna bodů dostatečnými k detekci trhlin o šířce 0,3 mm na betonových površích. Snížení překryvu na 60 % podélný / 40 % příčný mělo za následek 30 % modelu mostu s mezerami v rekonstrukci, zejména ve stínovaných oblastech pod palubou.
Prvek mostu
Úhel kamery
Podélný překryv
Příčný/boční překryv
Poznámky
Paluba mostu
Nadir
80–85 %
70–80 %
Mřížkový letový vzor
Nosníky
Šikmý (30–45°)
75–80 %
65–75 %
Orbitální nebo lineární průlet
Ložiska
Horizontálně-šikmý
80–90 %
70–80 %
Orbits zblízka
Opěry
Šikmý (45–60°)
70–80 %
60–70 %
Vertikální povrchy
Pilíře
Šikmý (45–60°)
70–80 %
60–70 %
Více směrů průletů
Plánování letu pro překryv snímků
Dosažení správného překryvu snímků v praxi vyžaduje pečlivé plánování letu, které zohledňuje specifickou geometrii měřené oblasti a schopnosti dronu a kamery.
Postup plánování letu. Standardní postup začíná definováním hranice měřené oblasti, poté výběrem požadovaného GSD a procent překryvu v softwaru pro plánování mise. Software vypočítá požadovanou výšku letu, rozestup letových linií a interval spouštění kamery, a poté vygeneruje letovou dráhu. Moderní plánovací nástroje jako DroneDeploy, Pix4Dcapture, DJI Pilot 2 a UGCS tento výpočet automatizují, ale operátor musí rozumět základním parametrům, aby ověřil, že je plán správný.
Volba výšky. Výška letu určuje jak GSD, tak stopu snímku. Vyšší nadmořská výška produkuje větší pozemní stopy, což znamená, že k pokrytí měřené oblasti je potřeba méně snímků. Vyšší nadmořská výška však také znamená hrubší GSD. Vztah mezi výškou, GSD a překryvem je:
Kde L_podel a L_pric jsou podélné a příčné rozměry pozemní stopy, Výška je výška letu nad úrovní terénu, Sensor_vyska a Sensor_sirka jsou fyzické rozměry senzoru kamery a Ohniskova_vzdalenost je ohnisková vzdálenost objektivu.
Interval spouštění kamery. Čas mezi po sobě jdoucími expozicemi kamery určuje podélný překryv. Interval spouštění se vypočítává jako:
Pro dron letící rychlostí 10 m/s s podélnou stopou snímku 120 m a požadovaným podélným překryvem 80 % musí kamera spouštět každých 2,4 sekundy. Software pro plánování letu obvykle tento výpočet provádí automaticky, ale pro kritická měření se doporučuje ruční ověření.
Rozestup letových linií. Vzdálenost mezi sousedními letovými liniemi určuje příčný překryv:
Rozestup_linií = L_pric × (1 — O_s / 100)
Pro příčnou stopu snímku 160 m a požadovaný příčný překryv 65 % by měly být letové linie vzdáleny 56 m od sebe.
Úvahy o rychlosti. Vyšší rychlosti letu vyžadují rychlejší intervaly spouštění pro zachování stejného podélného překryvu. Při rychlosti 15 m/s je interval spouštění pro 80% podélný překryv se stopou 120 m pouze 1,6 sekundy. Ne všechny kamery dokáží udržet tak rychlé snímání, zejména při zápisu na paměťovou kartu. Maximální snímková frekvence kamery (typicky 0,5–2 snímků za sekundu u profesionálních mapovacích kamer) představuje tvrdý limit pro dosažitelný překryv při dané rychlosti. Pokud je vyžadován vyšší překryv, musí dron letět pomaleji.
Účinky větru. Vítr může způsobit, že se skutečná rychlost dronu nad zemí liší od plánované rychlosti. Protivítr snižuje rychlost nad zemí, čímž efektivně zvyšuje podélný překryv. Zadní vítr zvyšuje rychlost nad zemí, čímž snižuje podélný překryv. Pro měření s extrémními tolerancemi překryvu by měl být software pro plánování mise nakonfigurován tak, aby používal spouštění založené na rychlosti nad zemí namísto spouštění založeného na čase, což zajišťuje konzistentní překryv bez ohledu na větrné podmínky.
Správa baterie. Vyšší překryv generuje více snímků a delší dobu letu. Typické měření při překryvu 80/65 vyžaduje přibližně 20–25 minut na 50 hektarů při výšce 100 m. Zvýšení na překryv 85/75 prodlužuje tuto dobu na 35–40 minut. Pro velké oblasti musí být mise rozdělena do více letů, které jsou později sloučeny ve zpracovatelském softwaru.
Vliv terénu na překryv snímků
Software pro plánování letu vypočítává překryv na základě plánované výšky nad úrovní terénu (AGL). Skutečný terén je však málokdy rovný a skutečný překryv na úrovni terénu se může výrazně lišit od plánovaných hodnot.
Problém nadmořské výšky terénu. Když dron letí v plánované výšce AGL nad terénem s významnými výškovými rozdíly, skutečná vzdálenost k povrchu se mění. Nad kopci je dron blíže, než bylo plánováno, což zmenšuje skutečnou stopu snímku a zvyšuje GSD. V údolích je dron dále, než bylo plánováno, což zvětšuje stopu snímku a zhoršuje GSD. Procento překryvu se odpovídajícím způsobem mění — překryv se zvyšuje nad kopci (kde se stopa snímku zmenšuje) a snižuje se v údolích (kde se stopa rozšiřuje).
Let sledující terén. Režimy letu sledující terén používají předem nahraný digitální model terénu (DEM) nebo snímání výšky v reálném čase k udržení konstantní AGL nad proměnlivým terénem. To zachovává plánovaný překryv a GSD napříč měřenou oblastí. Let sledující terén je nezbytný pro měření v kopcovitém nebo hornatém terénu. Bez něj se může překryv lišit o 10–20 procentních bodů mezi kopci a údolími, což vede k mezerám v pokrytí v níže položených oblastech.
Městský terén. Budovy a další stavby vytvářejí dramatické lokální výškové rozdíly, které ovlivňují překryv. Budova, která se tyčí 30 m nad okolním terénem, snižuje efektivní vzdálenost kamery od střechy o 30 m, což může snížit skutečný podélný překryv na úrovni střechy o 15–20 procentních bodů oproti plánované hodnotě. Pro městské průzkumy by měl být překryv zvýšen jako kompenzace — počínaje 80–85% podélným překryvem pro zajištění adekvátního pokrytí na úrovni střech.
Účinky lesa a korun stromů. Husté koruny stromů vytvářejí efektivní povrch, který je vyšší a nepravidelnější než nadmořská výška terénu. Výpočty překryvu založené na nadmořské výšce terénu podhodnotí skutečný překryv na úrovni korun. Pro lesnické průzkumy by plánování letu mělo používat očekávanou výšku korun namísto nadmořské výšky terénu jako referenci AGL.
Okluzní stíny. Vysoké objekty vytvářejí okluzní stíny — oblasti, které nejsou ve snímcích viditelné, protože jsou skryty za objektem. Okluzní stíny jsou největší u nadirových snímků, kde se skrytá oblast rozprostírá směrem od objektu. Vyšší překryv pomáhá zmírňovat okluzní stíny tím, že zajišťuje, že skryté oblasti jsou viditelné z různých pozic kamery podél letové linie.
Ověření překryvu po letu
Po zachycení snímků by měl být překryv ověřen před opuštěním místa měření, aby bylo zajištěno, že data jsou vhodná pro zpracování. Ověření po letu zachycuje problémy včas, než letový tým opustí oblast a náklady na opakovaný let se stanou prohibitivními.
Metody ověření na místě. Nejdostupnější metodou je prohlídka stop snímků v aplikaci pro plánování mise ihned po letu. Většina aplikací zobrazuje přibližné pozemní pokrytí každého snímku jako obdélník překrytý na mapě. Mezery mezi obdélníky indikují mezery v pokrytí. Sousední obdélníky s velmi úzkými zónami překryvu indikují marginální překryv, který může způsobit problémy při zpracování. Mnoho aplikací také vykazuje minimální, průměrný a maximální překryv dosažený během mise.
Kontrola hustoty pozic kamery. Rychlý počet pozic snímků vzhledem k měřené oblasti poskytuje hrubou kontrolu překryvu. Plocha 10 hektarů ve výšce 100 m s překryvem 80/65 by měla produkovat přibližně 100–150 snímků. Pokud je počet výrazně nižší, překryv může být nedostatečný. Aplikace pro plánování mise obvykle poskytují očekávané počty snímků během plánování a skutečný počet by měl těsně odpovídat.
Zprávy o kvalitě fotogrammetrie. Po zahájení zpracování generuje fotogrammetrický software zprávy o kvalitě, které odhalují problémy s překryvem. Klíčové indikátory zahrnují:
Mapa pozic kamer — zobrazuje odhadovanou polohu každého snímku po vyrovnání svazku. Mezery ve vzoru pozic kamer indikují oblasti, kde se snímky nepodařilo zarovnat.
Počet spojovacích bodů — počet párovacích příznaků na dvojici snímků. Hodnoty pod 100 indikují slabý překryv nebo nízkou texturu.
Reprojekční chyba — průměrná chyba pixelu po vyrovnání svazku. Hodnoty nad 1,0 pixelu naznačují problémy s vyrovnáním.
Hustota hustého mračna bodů — oblasti s abnormálně nízkou hustotou bodů často indikují nedostatečný překryv.
Kvalita ortofotomozaičky — viditelné švy, duchování nebo rozmazání na hranicích snímků indikují problémy s překryvem.
Plánování opakovaného letu. Pokud ověření odhalí nedostatečný překryv, musí být měření znovu provedeno. Nejjednodušší opravou je zvýšit oba parametry překryvu o 5–10 procentních bodů. Pro místa, kde problémy způsobil terén nebo stavby, může být zapotřebí let sledující terén nebo vyšší základní výška. Pro povrchy s nízkou texturou může přidání pozemních kontrolních bodů nebo umělých texturních značek zlepšit párování příznaků.
Bezpečné rezervy. Doporučeným přístupem je plánovat s bezpečnostní rezervou: nastavit překryv o 5 % vyšší, než je teoretické minimum pro danou aplikaci. To zohledňuje účinky větru, drift GPS, variabilitu terénu a nevyhnutelné drobné odchylky od ideální letové dráhy, k nimž dochází v reálném provozu.
Shrnutí
Překryv snímků — zahrnující podélný překryv (podélný přesah / překryv podél dráhy) a příčný překryv (boční přesah / laterální / příčný překryv) — je základním akvizičním parametrem, který určuje, zda fotogrammetrické měření uspěje nebo selže. Podélný překryv 75–85 % zajišťuje, že každý bod na zemi na každé letové linii je zachycen na více po sobě jdoucích snímcích. Příčný překryv 60–75 % zajišťuje souvislé pokrytí napříč sousedními letovými liniemi bez mezer. Společně tyto parametry vytvářejí geometrickou redundanci, kterou algoritmy Structure from Motion vyžadují pro spolehlivé párování příznaků, triangulaci pozic kamer a hustou 3D rekonstrukci.
Nedostatečný překryv vytváří mezery v rekonstrukci, selhání zarovnání, sníženou přesnost a oblasti s chybějícími daty — problémy, které nelze opravit v následném zpracování. Nadměrný překryv zvyšuje dobu letu, úložiště a dobu zpracování 3–5× bez proporcionálního zlepšení přesnosti. Praktické optimum pro většinu aplikací leží na 75–85 % podélném a 60–75 % příčném překryvu, přičemž vyšší hodnoty jsou vyhrazeny pro povrchy s nízkou texturou, složité konstrukce, jako jsou mosty, a požadavky na přesnost v řádu sub-centimetrů.
Inspekce vozovek a ranvejí těží z vyššího překryvu (80–85 % podélný, 70–75 % příčný), protože uniformní asfaltové povrchy poskytují méně přirozených spojovacích bodů. Inspekce mostů vyžaduje specializované strategie překryvu pro různé konstrukční prvky: 80–85 % podélný pro paluby, 75–80 % pro nosníky a 80–90 % pro blízkou inspekci ložisek. Ověření stop snímků a zpráv o kvalitě překryvu po letu zajišťuje, že problémy jsou identifikovány dříve, než měřický tým opustí místo, čímž se předchází nákladnému opakovanému nasazení.
Jste profesionál v letištní nebo letecké údržbě?
Budujeme síť partnerů pro revoluci v údržbě letišť pomocí špičkové technologie.
Slovník topografie, povrchových tvarů a výškopisného měření
Komplexní slovník topografie, povrchových tvarů a výškopisného měření, pokrývající klíčové pojmy, nástroje a technické standardy dle ICAO, USGS a autoritativníc...
Snímkování z nadiru je pořizováno s kamerou namířenou přímo dolů, kolmo k zemi, což vytváří minimální perspektivní zkreslení pro přesnou tvorbu ortofotomozik, m...
Fotogrammetrie je věda o odvozování spolehlivých 3D měření a geometrických informací z překrývajících se 2D fotografií. Při inspekci infrastruktury vytváří foto...
24 min čtení
Surveying
Mapping
+6
Souhlas s cookies Používáme cookies ke zlepšení vašeho prohlížení a analýze naší návštěvnosti. See our privacy policy.