+++ title = “Překryv snímků” description = “Překryv snímků (podélný a příčný překryv) je procento plochy snímku, které je sdíleno mezi po sobě...
27 min čtení
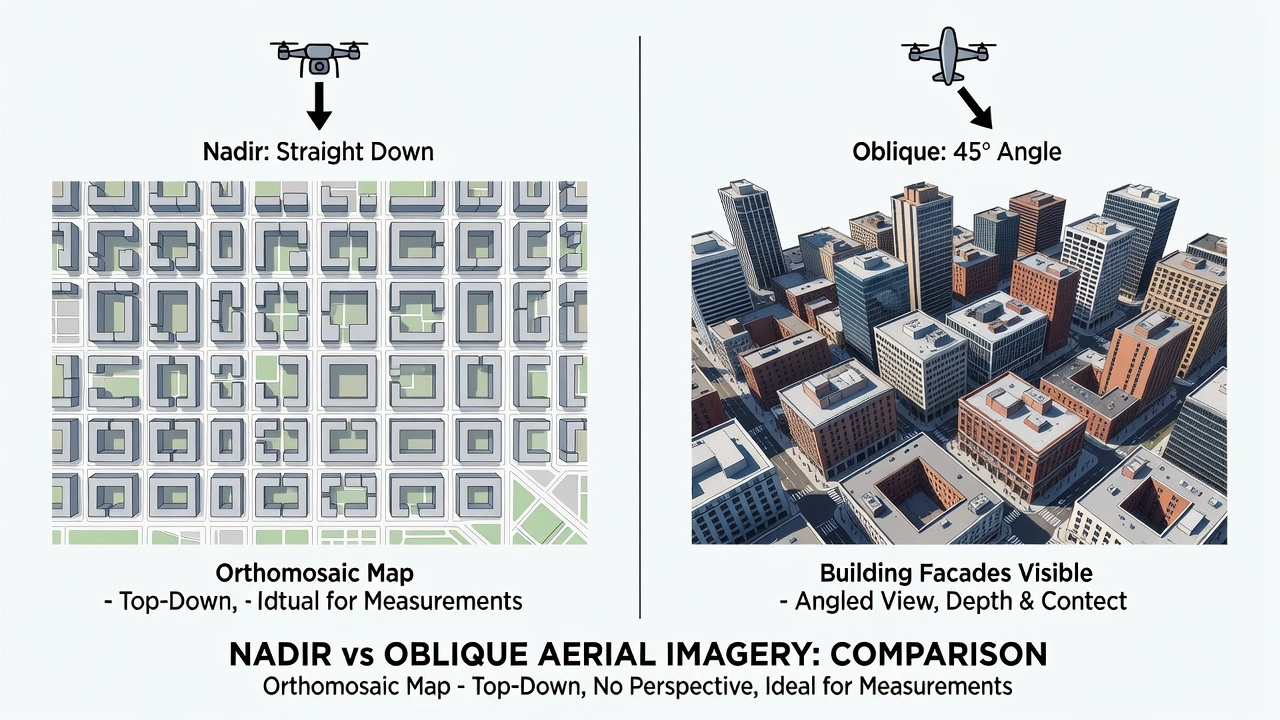
Snímkování z nadiru je pořizováno s kamerou namířenou přímo dolů, kolmo k zemi, což vytváří minimální perspektivní zkreslení pro přesnou tvorbu ortofotomozik, mapování a měření. Jedná se o standardní orientaci pro dronovou fotogrammetrii a letecké geodetické průzkumy.
Snímkování z nadiru je typ letecké fotografie pořízené s osou kamery orientovanou v úhlu 90 stupňů k povrchu země – směřující přímo dolů. Termín nadir pochází z astronomie, kde popisuje bod na nebeské sféře přímo pod pozorovatelem, opak zenitu. V letecké fotografii, satelitním dálkovém průzkumu a dronové fotogrammetrii je nadir bod na zemi, který leží svisle pod perspektivním středem objektivu kamery.

V kontextu letecké geodézie vytváří nadir orientace snímky s nejmenším perspektivním zkreslením a nejrovnoměrnějším měřítkem v celém záběru. Tato geometrická čistota je důvodem, proč je snímkování z nadiru výchozí, standardní orientací pro tvorbu ortofotomozik, polohopisné mapování a kvantitativní měření prakticky ve všech pracovních postupech dronové fotogrammetrie. Na rozdíl od šikmých snímků, kde jsou pixely ve spodní části záběru blíže kameře než ty v horní části, si snímky z nadiru udržují konzistentní velikost pixelu na zemi (GSD) – skutečnou vzdálenost v terénu reprezentovanou každým pixelem – v celé fotografii.
GIS slovník Esri definuje nadir jako “bod na zemi svisle pod perspektivním středem objektivu kamery nebo detektorů skeneru, nebo bod konvergence (úběžník) pro všechny svislé paprsky v rámci scény.” Tato definice má pro letecké geodety dva zásadní důsledky.
Zaprvé, nadir bod je jediným místem na letecké fotografii, které je zcela prosté reliéfního posunu – zdánlivého posunu polohy objektů způsobeného změnami nadmořské výšky terénu. Jak se vzdalujete od nadir bodu směrem k okrajům záběru, reliéfní posun se proporcionálně zvyšuje. To je důvod, proč jsou snímky orientované z nadiru preferovány pro mapování rovinného terénu: minimalizují geometrické korekce potřebné během ortorektifikace.
Zadruhé, nadir definuje svislou osu souřadnicového systému kamery. Ve fotogrammetrii je vnitřní orientace kamery – ohnisková vzdálenost, hlavní bod, parametry zkreslení objektivu – kalibrována relativně k nadir směru. Jakákoli odchylka od skutečného nadiru (známá jako sklon nebo náklon) zavádí systematické chyby, které musí být modelovány a odstraněny během fotogrammetrického zpracování. Moderní dronové gimbaly dokáží udržet nadir orientaci v rozmezí ±0,1° za stabilních podmínek, ale poryvy větru a agresivní manévrování mohou způsobit náklon, který snižuje výslednou přesnost.
Vztah mezi nadirem a GSD se řídí jednoduchým zákonem nepřímé úměry: GSD = (výška letu × velikost pixelu senzoru) / ohnisková vzdálenost. Pro danou kameru zdvojnásobení výšky letu zdvojnásobí GSD, což znamená, že každý pixel pokrývá dvojnásobnou vzdálenost na zemi v obou rozměrech, čímž se plocha na pixel zčtyřnásobí. Snímkování z nadiru vytváří nejpředvídatelnější GSD, protože délka optické dráhy je stejná v celém senzoru – vzdálenost kamery od země je konstantní pro všechny pixely, na rozdíl od šikmých snímků, kde se délka dráhy v rámci jednoho snímku výrazně liší.
Když je kamera orientována ve skutečné nadir poloze, optická osa objektivu je kolmá k rovině země. To znamená, že rovina snímku a rovina země jsou vzájemně rovnoběžné. V této konfiguraci následuje geometrie pořízeného snímku jednoduchý model centrální projekce, kde je měřítko v celém snímku jednotné, za předpokladu rovinného terénu.
Matematický model geometrie snímku z nadiru je výrazně jednodušší než u šikmých snímků. U skutečného nadir snímku lze transformaci z 3D světových souřadnic do 2D souřadnic snímku aproximovat jednoduchým škálováním a posunem, vyžadujícím pouze čtyři parametry. Naproti tomu šikmé snímky vyžadují plnou projektivní transformaci s osmi nebo více parametry, plus dodatečné modelování pro proměnlivé GSD, perspektivní zkrácení a zakryté oblasti.
Tato geometrická jednoduchost má praktické důsledky. Snímky z nadiru se zpracovávají rychleji ve fotogrammetrických pipelinech, protože algoritmy pro přiřazování prvků snáze nacházejí odpovídající body, pokud jsou rozdíly v měřítku mezi snímky minimální. Výpočetní náročnost zpracování Structure from Motion (SfM) pro datové sady pouze z nadiru může být o 30–50 % nižší než u datových sad s výrazným šikmým obsahem, jednoduše proto, že geometrická omezení jsou těsnější a řešení konverguje rychleji.
Snímkování z nadiru nabízí několik výrazných výhod, které ho činí nepostradatelným pro letecké geodetické práce a mapování.
Minimální perspektivní zkreslení. U skutečného snímku z nadiru se všechny prvky na zemi zobrazují ve svém správném geometrickém vztahu, bez zkrácení nebo efektu klínovitosti běžného u šikmé fotografie. Obdélníková střecha budovy vypadá v nadir pohledu obdélníkově, ne lichoběžníkově jako u šikmého pohledu. Díky tomu je snímkování z nadiru ideální pro měření vzdáleností, ploch a úhlů přímo na snímku.
Jednotná velikost pixelu na zemi. Každý pixel v snímku z nadiru představuje stejnou fyzickou plochu na zemi, za předpokladu rovinného terénu. Toto jednotné rozlišení znamená, že měření trhliny provedené blízko středu snímku má stejnou přesnost jako měření provedené blízko okraje snímku. U šikmých snímků se může rozlišení lišit až trojnásobně mezi blízkým a vzdáleným okrajem jedné fotografie.
Optimální pro tvorbu ortofotomozik. Ortofotomoziky – geometricky korigované, plynule navazující kompozitní snímky – spoléhají na snímky z nadiru jako na svůj primární vstup. Proces ortorektifikace odstraňuje posuny způsobené terénem a efekty náklonu kamery za účelem vytvoření mapově přesného snímku, kde je každý pixel umístěn ve své skutečné geografické poloze. Snímky z nadiru vyžadují minimální ortorektifikaci, protože již aproximují ortografickou projekci, které chtějí ortofotomoziky dosáhnout.
Předvídatelné vzory překryvu. Při letu v nadir mřížce následuje překryv mezi sousedními snímky čistý, předvídatelný vzor určený pouze výškou letu, rychlostí a intervalem spouště kamery. Tato předvídatelnost zjednodušuje plánování letu a zajišťuje úplné pokrytí s minimální redundancí. Software pro plánování misí může vypočítat přesné polohy spouště kamery pro dosažení cílových procent překryvu s matematickou přesností.
Vynikající pro polohopisné mapování. Polohopisné mapy – mapy zobrazující pouze horizontální polohy prvků bez výškových údajů – jsou nejlépe vytvářeny ze snímků z nadiru, protože horizontální geometrie je již dobře zachována. Prvky jako dopravní značení, hranice pozemků, kryty inženýrských sítí a půdorysy budov lze digitalizovat přímo z nadir ortofotomozik s vysokou polohovou přesností.
Vyšší efektivita pokrytí. Mise mapování z nadiru pokryje za jeden let více území než šikmá mise ve stejné výšce, protože zorné pole kamery se promítá na zem jako obdélník, nikoli lichoběžník. U typického dronu letícího ve výšce 120 m nad terénem s objektivem s ohniskem ekvivalentním 24 mm pokrývá snímek z nadiru přibližně 200 × 150 m země, zatímco šikmý snímek pod úhlem 45° pokrývá větší celkovou plochu, ale s vysoce proměnlivým rozlišením a výrazným zakrytím za vysokými objekty.
Snímkování z nadiru je základem dronové fotogrammetrie. Standardní pracovní postup pro vytváření ortofotomozik, digitálních modelů povrchu (DSM) a 3D mračen bodů začíná pořízením snímků z nadiru v systematickém mřížkovém vzoru.
Parametry plánování letu pro fotogrammetrii z nadiru jsou dobře zavedené. Americká společnost pro fotogrammetrii a dálkový průzkum (ASPRS) doporučuje minimálně 60% podélný překryv a 30% příčný překryv pro základní tvorbu ortofotomozik, ačkoli většina praktiků používá 75–80% podélný překryv a 60–70% příčný překryv pro vysoce přesné práce. Dodatečný překryv zajišťuje, že se každý bod na zemi objeví alespoň na třech až pěti snímcích, což poskytuje redundanci potřebnou pro spolehlivé automatické přiřazování vlícovacích bodů a vyrovnání svazku.
Velikost pixelu na zemi a výška letu. Vztah mezi výškou letu a GSD je lineární: GSD = (výška × velikost pixelu) / ohnisková vzdálenost. U DJI Mavic 3 Enterprise s CMOS senzorem formátu 4/3 (3,3 μm velikost pixelu) a ohniskovou vzdáleností ekvivalentní 24 mm při letu ve výšce 100 m nad terénem je GSD přibližně 1,3 cm/pixel. Při tomto rozlišení lze teoreticky detekovat trhliny ve vozovce široké až 4 mm, ačkoli praktické limity detekce jsou typicky 2–3násobek GSD.
Kopírování terénu. Pro lokality s výraznými změnami nadmořské výšky udržují režimy kopírování terénu konstantní vzdálenost nad terénem, čímž zachovávají konzistentní GSD v celé oblasti průzkumu. Bez kopírování terénu budou mít snímky z nadiru pořízené nad kopcovitým terénem proměnlivé rozlišení – vyšší rozlišení nad vrcholky kopců, kde je dron blíže, nižší rozlišení v údolích, kde je dále. Většina profesionálních mapovacích dronů a letového softwaru nyní podporuje kopírování terénu pomocí palubního LiDARu, modelů terénu v reálném čase nebo předem nahraných digitálních modelů výškových poměrů.
Vzory s více mřížkami. Pro rozsáhlé průzkumy jsou mise z nadiru obvykle létány v dvojitém mřížkovém (křížovém) vzoru: jeden přelet s liniemi letu sever-jih, poté druhý přelet s liniemi letu východ-západ. Tento křížový vzor zlepšuje kvalitu 3D rekonstrukce tím, že poskytuje kolmé úhly pohledu pro každý bod na zemi, i když kamera zůstává v nadir orientaci. Křížový vzor je obzvláště důležitý pro lokality s jemnými topografickými prvky, které by mohly být z jediného směru letu špatně rekonstruovány.
Georeferencování. Snímky z nadiru musí být georeferencovány, aby vznikly použitelné mapové produkty. Přímé georeferencování využívá palubní GPS/IMU dronu k označení každého snímku přibližnou polohou a orientací. Pro přesnost na úrovni geodetických prací jsou na lokalitě rozmístěny vílcovací body (GCP) na zaměřených místech viditelných na snímcích. Korekce RTK a PPK dále zlepšují přesnost přímého georeferencování. S drony vybavenými RTK lze dosáhnout absolutní polohové přesnosti 2–5 cm (horizontálně) a 4–7 cm (vertikálně) bez GCP. S dobře rozmístěnými GCP je běžně dosažitelná přesnost 1–2 cm.
Porozumění rozdílům mezi snímkováním z nadiru a šikmým snímkováním je zásadní pro výběr správné strategie pořizování snímků pro daný projekt.
| Parametr | Snímkování z nadiru | Šikmé snímkování |
|---|---|---|
| Úhel kamery | 90° (přímo dolů) | 30°–60° od svislice |
| Perspektivní zkreslení | Minimální, jednotné měřítko | Výrazné, proměnlivé měřítko |
| Konzistence GSD | Jednotné v celém záběru | Proměnlivé (3:1 a více) |
| Vhodnost pro ortofotomoziku | Vynikající (primární vstup) | Špatná (pouze doplňková) |
| Úplnost 3D modelu | Špatné stěny, pouze střechy | Kompletní s fasádami |
| Efektivita pokrytí | Vysoká (na jeden let) | Nižší (více přeletů) |
| Doba zpracování | Rychlejší (jednodušší geometrie) | Pomalejší (složitější) |
| Přesnost měření | Vyšší pro horizontální | Vyšší pro svislé povrchy |
| Nejlepší pro | Mapy, ortofotomoziky, plošná měření | 3D modely, inspekce fasád |
Snímkování z nadiru vyniká v zachycování horizontálních povrchů – střech, vozovek, terénu, zemědělských plodin. Vytváří čisté, geometricky přesné mapy, které lze přímo použít pro měření a analýzu. Šikmé snímkování na druhé straně zachycuje svislé povrchy, které snímkování z nadiru nevidí: fasády budov, mostní opěry, opěrné zdi a skalní stěny.
Volba mezi nadirem a šikmým snímkováním není binární. Většina profesionálních leteckých geodetických projektů používá oba typy. Typický profil mise zahrnuje přelet v nadir mřížce pro ortofotomoziku a horizontální geometrii, následovaný čtyřmi šikmými přelety (sever, jih, východ, západ) pod úhlem 45° pro detail fasád. Některé špičkové systémy používají pěti-kamerové sestavy, které zachycují jeden nadir a čtyři šikmé snímky současně, čímž odpadá potřeba více přeletů.
Snímkování z nadiru je preferovanou orientací pro inspekci vozovek pomocí dronů. Perspektiva přímo dolů je ideálně vhodná pro dokumentaci stavu povrchu vozovky, protože cíle inspekce – trhliny, vyjeté koleje, rozpad, výtluky, povrchové vady – jsou všechny prvky viditelné na horizontálním povrchu vozovky.
Hodnocení indexu stavu vozovky (PCI). Standardní metodika pro hodnocení stavu vozovky, ASTM D5340, se opírá o vizuální kontrolu typů povrchového poškození, úrovní závažnosti a rozsahu. Snímkování z nadiru dronem poskytuje úplný, trvalý vizuální záznam povrchu vozovky, který lze systematicky analyzovat pro výpočet PCI. Vysoce rozlišovací ortofotomoziky vytvořené ze snímků z nadiru umožňují inspektorům identifikovat a klasifikovat poškození v celých sítích vozovek bez nutnosti procházet lokalitu pěšky.
Detekce a měření trhlin. Snímkování z nadiru s GSD pod 1 cm (0,5–1,0 cm/pixel) umožňuje automatizovanou detekci trhlin pomocí algoritmů počítačového vidění. Podélné trhliny, příčné trhliny, síťové trhliny a blokové trhliny jsou všechny viditelné na vysoce rozlišovacích snímcích z nadiru. Šířky trhlin až od 2–3 mm lze měřit z ortofotomozik s odpovídajícím GSD a ostrou kvalitou snímku. Moderní systémy detekce trhlin založené na hlubokém učení dosahují míry detekce 90–95 % na snímcích vozovek z nadiru s mírou falešně pozitivních výsledků pod 5 %.
Detekce cizích předmětů na ranveji (FOD). Cizí předměty na letištních ranvejích představují vážné bezpečnostní riziko. Snímkování z nadiru dronem pořízené během rutinních inspekcí ranvejí dokáže detekovat předměty FOD o velikosti již 2 cm v průměru při letu ve vhodné výšce. Několik velkých letišť po celém světě nyní používá dronovou inspekci z nadiru jako součást svých programů řízení FOD, čímž doplňují nebo nahrazují tradiční vozidlové hlídky FOD.

Shoda s ICAO Annex 14. Mezinárodní organizace pro civilní letectví (ICAO) Annex 14 – Letiště specifikuje požadavky na monitorování stavu povrchu pro letiště. I když ICAO nenařizuje konkrétní inspekční technologie, příloha vyžaduje, aby byl stav povrchu ranveje pravidelně posuzován a vykazován. Snímkování z nadiru dronem poskytuje měřitelná, ověřitelná data, která splňují tyto regulatorní požadavky a zároveň zkracují dobu uzavření ranveje ve srovnání s tradičními vizuálními inspekčními metodami. Poradní oběžník FAA 150/5200-18C rovněž podporuje použití pokročilých technologií, včetně inspekce dronem, pro správu letištních vozovek.
Navzdory mnoha výhodám má snímkování z nadiru významná omezení, která musí geodeti a inspektoři chápat.
Neviditelnost svislých povrchů. Nejzákladnějším omezením snímkování z nadiru je, že nedokáže zachytit svislé povrchy. Fasády budov, boky mostů, stěny tunelů, licové plochy přehrad a opěrné zdi jsou buď zcela neviditelné, nebo se na snímcích z nadiru objevují pouze jako úzké proužky. Pro inspekci infrastruktury to znamená, že inspekce pouze z nadiru opomíjí kritické konstrukční prvky. Mostní nosníky, ložiskové sestavy, opěrné zdi a pilíře nejsou z nadir perspektivy viditelné.
Efekt “rozpouštějící se budovy”. Když jsou snímky z nadiru použity samostatně pro generování 3D modelů, vykazují svislé konstrukce to, co fotogrammetristé nazývají efekt “rozpouštějící se budovy” – stěny, které jsou deformované, špatně texturované nebo slité dohromady u svých základen. K tomu dochází, protože fotogrammetrický software nemá dostatek geometrických informací k rekonstrukci svislých povrchů z dat pouze z nadiru. Model zachycuje střechu přesně, ale nemá žádné datové body na stěnách, což nutí algoritmus interpolovat mezi okraji střechy a prvky na úrovni terénu.
Zakrytí a podříznutí. Snímkování z nadiru nevidí pod převisy, za vyvýšené konstrukce nebo do zapuštěných oblastí. Hluboké střešní převisy, kryté chodníky, spodní strany mostů a vjezdy do tunelů jsou z nadir perspektivy neviditelné. Pro tyto oblasti jsou nezbytné šikmé nebo horizontální orientace kamery.
Snížená přesnost na strmém terénu. Na strmých svazích se výhoda jednotného GSD u snímkování z nadiru ztrácí. Efektivní GSD na povrchu svahu je součinem nominálního GSD a sekantu úhlu svahu. Sklon 30° zvyšuje efektivní GSD o 15 %, zatímco sklon 45° ho zdvojnásobuje. Let s kopírováním terénu pomáhá, ale tento efekt zcela nekompenzuje.
Omezení stíny. Snímkování z nadiru pořízené při nízkém úhlu slunce trpí dlouhými stíny vrhanými stromy, budovami a terénními prvky. Tyto stíny zakrývají povrchy vozovek a mohou skrývat vady nebo prvky zájmu. Létání během poledních hodin (10:00 až 14:00) minimalizuje problémy se stíny a zatažené podmínky poskytují ideální difuzní osvětlení, které stíny zcela eliminuje.
Pokud cíl inspekce zahrnuje svislé povrchy – fasády budov, boky mostů, opěrné zdi – je nutné šikmé snímkování. Šikmé letecké snímkování je pořizováno s kamerou nakloněnou pod úhlem, typicky mezi 30° a 60° od svislé osy. Tato perspektiva odhaluje boky konstrukcí, které snímkování z nadiru nevidí.
Inspekce fasád budov. Pro inspekce fasád budov v rámci programů, jako je newyorský program inspekce bezpečnosti fasád (FISP), poskytuje šikmé snímkování dronem nákladově efektivní alternativu k tradičním inspekcím z lešení. Šikmé snímky zachycují stav stěn, těsnění oken, praskliny ve zdivu, korozi a další vady fasád s dostatečným rozlišením pro hodnocení stavu. Typická mise pro inspekci fasád zachycuje šikmé snímky ze čtyř světových stran, aby bylo zajištěno zdokumentování všech čtyř stran budovy.
Inspekce mostů a infrastruktury. Inspekce mostů vyžaduje pokrytí všech konstrukčních prvků: povrch mostovky, nosníky, ložiska, opěry, pilíře a přechodové desky. Snímkování z nadiru zachycuje povrch mostovky, ale zbývající prvky vyžadují šikmé nebo dokonce horizontální úhly kamery. Protokoly pro inspekci mostů dronem vyvinuté Federální správou silnic (FHWA) a státními dopravními úřady specifikují plány snímkování z více úhlů, které zahrnují průzkum mostovky z nadiru, šikmé průzkumy nosníků a horizontální průzkumy ložisek.
Orbitální vzor šikmého snímkování. Pro inspekci jednotlivých konstrukcí je orbitální letový vzor se šikmým úhlem kamery efektivnější než mřížkové mise z nadiru. Dron letí po kruhové dráze kolem konstrukce, udržuje konstantní vzdálenost a výšku, zatímco kamera směřuje dovnitř pod pevným šikmým úhlem. Tento orbitální vzor zajišťuje, že každý svislý povrch je zachycen z několika bočních úhlů, což poskytuje úplné pokrytí pro 3D rekonstrukci.
Nejúplnější letecké geodetické datové sady vznikají kombinací snímků z nadiru a šikmých snímků v jednom letovém plánu. Nadir složka poskytuje přesnou horizontální geometrii a ortofotomoziku, zatímco šikmá složka přidává vertikální detail potřebný pro kompletní 3D rekonstrukci.
Standardní pětiprůchodová mise. Průmyslově standardní přístup pro komplexní letecký průzkum konstrukcí zahrnuje pět samostatných letových průchodů:
Toto pětisměrové snímkování zajišťuje, že každý povrch budovy je vyfotografován alespoň ze dvou různých pozic kamery, což poskytuje geometrická omezení potřebná pro kompletní 3D rekonstrukci. Každý šikmý průchod typicky používá nižší překryv (60–70 %) než nadir průchod, protože primárním cílem je geometrická rozmanitost, nikoli redundance na úrovni pixelů.
Zpracování kombinovaných datových sad. Fotogrammetrický software zpracovává snímky z nadiru a šikmé snímky společně v jediném vyrovnání svazku. Snímky z nadiru poskytují stabilní horizontální referenční rámec, zatímco šikmé snímky přispívají vertikálními omezeními, která řeší plnou 3D geometrii. Moderní SfM pipeline, jako Pix4Dmapper, Agisoft Metashape a DJI Terra, zpracovávají smíšené datové sady nadir-šikmé automaticky, identifikují a přiřazují vlícovací body napříč oběma typy snímků.
Časové aspekty letu. Přidání šikmých průchodů přibližně zdvojnásobuje celkovou dobu letu ve srovnání s misí pouze z nadiru. Pro lokalitu o rozloze 20 hektarů trvá mise pouze z nadiru ve výšce 100 m se 75% překryvem přibližně 25–30 minut letového času. Přidání čtyř šikmých průchodů zvyšuje celkovou dobu letu na 55–70 minut, což vyžaduje buď více baterií, nebo dron s prodlouženou výdrží. Kompromis mezi dobou letu a úplností modelu musí být vyhodnocen pro každý projekt.
Polohová přesnost mapových produktů odvozených z nadiru se řídí zavedenými normami ASPRS, Federálního výboru pro geografická data (FGDC) a Národních norem přesnosti map (NMAS).
Normy polohové přesnosti ASPRS. Normy polohové přesnosti ASPRS pro digitální geoprostorová data (2015) klasifikují ortofotosnímky a další digitální geoprostorová data do tříd přesnosti na základě střední kvadratické chyby (RMSE) vyhodnocené vůči nezávislým kontrolním bodům. Pro ortofotosnímky odvozené ze snímků z nadiru norma specifikuje, že RMSE se vypočítá v obou horizontálních rozměrech (X a Y) a vykazuje se na 95% hladině spolehlivosti (RMSE × 1,7308 pro normálně rozdělené chyby).
| Třída ASPRS | RMSE (cm) | GSD (cm) | Typická výška letu (m) |
|---|---|---|---|
| Třída I | 2,5 | 1,0 | 80 |
| Třída II | 5,0 | 2,0 | 160 |
| Třída III | 10,0 | 4,0 | 320 |
| Třída IV | 20,0 | 8,0 | 640 |
Faktory ovlivňující přesnost. Výsledná přesnost mapových produktů odvozených z nadiru závisí na několika vzájemně propojených faktorech:
Kalibrace kamery — Přesně známá ohnisková vzdálenost, hlavní bod a parametry zkreslení objektivu jsou nezbytné pro nezkreslenou fotogrammetrickou rekonstrukci. Nekalibrované nebo špatně kalibrované kamery zavádějí systematické chyby, které nelze během zpracování odstranit.
Kvalita snímku — Ostré zaostření, správná expozice, nízký šum a minimální pohybová neostrost přispívají k přesnému přiřazování prvků a precizní triangulaci. Rozmazané nebo zašuměné snímky snižují přesnost měření vlícovacích bodů a degradují výslednou přesnost.
Kvalita překryvu — Konzistentní, dobře rozložený překryv zajišťuje, že všechny body na zemi jsou zobrazeny z více perspektiv. Mezery nebo nekonzistentní překryv zanechávají oblasti se slabými geometrickými omezeními a sníženou přesností.
Rozmístění GCP — Vílcovací body by měly být rovnoměrně rozmístěny v celé oblasti průzkumu, včetně perimetru, s vyšší hustotou v oblastech s členitým terénem. Špatné rozmístění GCP umožňuje driftování fotogrammetrického řešení, zejména na okrajích průzkumu.
GNSS polohování — Přesnost značky polohy kamery přímo ovlivňuje počáteční vyrovnání a konečnou absolutní přesnost. RTK korigované polohy (přesnost 1–3 cm) poskytují výrazně lepší výsledky než samostatná GPS (přesnost 2–5 m).
Složitost terénu — Strmé svahy, vysoké konstrukce a hustá vegetace snižují efektivní přesnost modelů odvozených z nadiru tím, že vytvářejí oblasti, kde je geometrická rekonstrukce méně omezena.
Validace a reporting kvality. Profesionální projekty mapování z nadiru zahrnují validaci vůči nezávisle zaměřeným kontrolním bodům. RMSE na těchto kontrolních bodech se vypočítá a vykazuje jako součást dokumentace kvality projektu. Prostorové rozložení reziduí je analyzováno na systematické trendy, které by mohly indikovat neopravené chyby kalibrace kamery, nesoulad referenčních systémů nebo artefakty zpracování.
Dosažení optimálních výsledků ze snímkování z nadiru vyžaduje pečlivou pozornost věnovanou každé fázi pracovního postupu pořizování a zpracování.
Předletové plánování. Před každou misí snímkování z nadiru by měla být oblast průzkumu posouzena z hlediska členitosti terénu, překážkového nebezpečí a omezení přístupu. Výška letu se volí na základě požadovaného GSD – čím nižší výška, tím vyšší rozlišení, ale delší doba letu. Praktické pravidlo je zvolit výšku, při které je požadované GSD dosažitelné v rámci jednoho cyklu baterie pro danou oblast průzkumu. Pro velké oblasti musí být mise rozděleny do více letů.
Nastavení kamery. Používejte manuální režim expozice, aby kamera neupravovala expozici mezi snímky, což by způsobilo rozdíly v jasu ve výsledné ortofotomozice. Nastavte rychlost závěrky alespoň na 1/1000 sekundy pro eliminaci pohybové neostrosti z vibrací dronu a dopředného pohybu. Použijte nejnižší ISO (100–400), které dosahuje správné expozice, čímž minimalizujete šum degradující přiřazování prvků. Clona by měla být nastavena na f/4 až f/8 – dostatečně široká, aby se zabránilo difrakčnímu rozostření, ale dostatečně úzká pro adekvátní hloubku ostrosti. Nastavte zaostření na manuální nekonečno, aby se zabránilo přeostřování autofokusu mezi snímky.
Optimalizace překryvu. Minimální překryv pro spolehlivou tvorbu ortofotomozik je 60 % podélně a 30 % příčně, ale 80 % podélně a 70 % příčně se doporučuje pro vysoce přesné práce. Dodatečný překryv poskytuje redundanci pro kontrolu kvality a zajišťuje úplné pokrytí i při menším driftu GPS nebo odchylkách letové dráhy způsobených větrem. Pro lokality s vysokými konstrukcemi by měl být překryv dále zvýšen, aby bylo zajištěno zachycení vrcholků konstrukcí na několika snímcích.
Světelné podmínky. Létávejte během poledních hodin (10:00 až 14:00), když je slunce nejvýše, aby se minimalizovaly stíny. Zatažené podmínky se stratovými oblaky poskytují ideální difuzní osvětlení, které stíny zcela eliminuje při zachování dostatečného osvětlení. Vyhněte se létání na přímém slunci s dlouhými stíny (časné ráno, pozdní odpoledne), protože zastíněné oblasti mohou být podexponované a ztratit detaily. Vyhněte se dešti, mlze a vysoké vlhkosti, které degradují kontrast snímků.
Vědomí terénu. Pro lokality s výraznými změnami nadmořské výšky použijte režim kopírování terénu, je-li k dispozici. Ten udržuje konstantní výšku nad úrovní terénu, čímž zachovává konzistentní GSD v celém průzkumu. Bez kopírování terénu se bude rozlišení lišit v poměru nejvyšší k nejnižší nadmořské výšce terénu v oblasti průzkumu.
Umístění GCP. Rozmístěte vílcovací body rovnoměrně v celé oblasti průzkumu, včetně blízkosti perimetru. Používejte terče o velikosti 5–10násobku GSD pro spolehlivou identifikaci na snímcích. Umísťujte GCP na rovné, stabilní povrchy mimo dosah vysokých překážek, které by mohly vrhat stíny. Zaměřte polohy GCP pomocí RTK GNSS zařízení pro přesnost na úrovni centimetrů.
Zajištění kvality. Po pořízení zkontrolujte snímky z hlediska ostrosti, expozice a pohybové neostrosti před opuštěním lokality. Zkontrolujte případné mezery v pokrytí prohlédnutím stop snímků v softwaru pro plánování misí. Pořiďte alespoň o 10 % více snímků na okrajích průzkumu, aby bylo zajištěno pokrytí od okraje k okraji po geometrických korekcích.
Integrita metadat. Ověřte, že EXIF data snímků obsahují přesné GPS souřadnice, výšku, model kamery a parametry objektivu. Poškozená nebo chybějící metadata mohou zabránit správnému georeferencování a mohou vyžadovat ruční opravu během zpracování. RTK korigované značky polohy by měly být ověřeny vůči známým geodetickým bodům, jsou-li k dispozici.
Snímkování z nadiru nachází uplatnění v celé řadě odvětví a případů použití.
Zemědělství. Multispektrální snímkování z nadiru je standardním zdrojem dat pro precizní zemědělství, používá se k vytváření map normalizovaného diferenčního vegetačního indexu (NDVI), identifikaci stresu plodin, odhadu výnosů a řízení variabilní aplikace hnojiv. Jednotné rozlišení snímků z nadiru zajišťuje konzistentní měření zdraví rostlin v celých polích.
Stavebnictví a zemní práce. Monitorování stavebních lokalit se opírá o snímkování z nadiru dronem pro vytváření denních nebo týdenních ortofotomozik ukazujících postup stavby, objemy skládek a přesnost terénních úprav. Výpočty objemů výkopů a násypů z digitálních modelů výškových poměrů odvozených z nadiru dosahují přesnosti 1–3 % při správném georeferencování.
Monitorování životního prostředí. Vymezení mokřadů, monitorování pobřežní eroze, mapování vegetace a hodnocení vlivů na životní prostředí používají snímkování z nadiru jako primární zdroj dat. Platformy jako GeoNadir poskytují specializované nástroje pro hodnocení stavu životního prostředí pomocí dronových a satelitních snímků z nadiru.
Pojišťovnictví a oceňování majetku. Pojišťovny používají nadir ortofotomoziky k měření ploch střech, posuzování stavu nemovitostí a dokumentaci již existujících škod pro správu pojistných událostí. Schopnost měřit přímo z georeferencovaných ortofotosnímků eliminuje potřebu fyzických návštěv lokalit pro mnoho úkolů oceňování majetku.
Krizová reakce. První zasahující používají rychle nasaditelné dronové mise z nadiru k mapování míst katastrof, vyhledávacích oblastí a perimetrů incidentů. Schopnost tvorby ortofotomozik v reálném čase umožňuje velitelům zásahu vidět celý rozsah místa z jediného pohledu shora, což podporuje taktické rozhodování.
Městské plánování. Městské plánovací úřady používají nadir ortofotosnímky jako podkladové mapy pro zonální analýzy, oceňování nemovitostí, plánování infrastruktury a monitorování městského rozvoje. Časové řady snímků z nadiru umožňují detekci změn pro identifikaci nepovolených staveb, sledování rozvojových vzorců a monitorování souladu s plánovacími předpisy.
Snímkování z nadiru – pořizované s kamerou namířenou přímo dolů, kolmo k zemi – je základním typem dat pro letecké geodetické práce, mapování a fotogrammetrii. Jeho jednotná geometrie, minimální perspektivní zkreslení a konzistentní velikost pixelu na zemi z něj činí optimální volbu pro tvorbu ortofotomozik, polohopisné mapování, plošná měření a inspekci vozovek. Omezení snímkování z nadiru – zejména jeho neschopnost zachytit svislé povrchy – jsou dobře známá a lze je překonat doplněním šikmého snímkování v kombinovaných plánech pořizování snímků. Profesionální letecké geodetické projekty rutinně integrují data z nadiru a šikmá data za účelem vytvoření úplných, přesných a použitelných geoprostorových produktů pro geodézii, stavebnictví, inspekci infrastruktury, zemědělství, monitorování životního prostředí a aplikace krizové reakce.
TarmacView poskytuje expertní inspekční služby z nadiru a šikmých úhlů pro vozovky, infrastrukturu a letištní majetek. Kontaktujte nás pro návrh zakázkového průzkumu.
+++ title = “Překryv snímků” description = “Překryv snímků (podélný a příčný překryv) je procento plochy snímku, které je sdíleno mezi po sobě...
Opěrný bod je přesně zaměřené, fyzicky označené místo se známými souřadnicemi, které slouží jako geodetická kotva pro georeferencování a zarovnání prostorových ...
Orientace v geodézii znamená nastavení referenčního směru pro všechna měření, což zajišťuje prostorovou přesnost. Pojmy jako úhlová poloha, zarovnání, azimut, o...