Fotogrammetrie je věda o odvozování spolehlivých 3D měření a geometrických informací z překrývajících se 2D fotografií. Při inspekci infrastruktury vytváří fotogrammetrie z dronů ortomozajky, digitální modely povrchu a 3D mračna bodů pro měření, detekci změn a dokumentaci stavu vozovek, mostů a budov.
Fotogrammetrie — Věda o měření z fotografií
Základní definice a historické základy
Fotogrammetrie je věda a technologie získávání spolehlivých kvantitativních informací o fyzických objektech a prostředí prostřednictvím procesu záznamu, měření a interpretace fotografických snímků a vzorců elektromagnetického záření. Termín pochází z řeckých kořenů photos (světlo), gramma (něco nakresleného nebo napsaného) a metron (měřit) — doslova „měření ze světelných kreseb." Tento obor sahá až do poloviny 19. století, krátce po vynálezu samotné fotografie. Aimé Laussedat, francouzský důstojník, je všeobecně považován za otce fotogrammetrie za svou průkopnickou práci v roce 1849, kdy použil pozemní fotografie pro topografické mapování — metodu, kterou nazval ikometrie.
Americká společnost pro fotogrammetrii a dálkový průzkum (ASPRS) definuje fotogrammetrii jako „umění, vědu a technologii získávání spolehlivých informací o fyzických objektech a prostředí prostřednictvím procesů záznamu, měření a interpretace fotografických snímků a vzorců zaznamenaného elektromagnetického záření a dalších jevů." Tato definice zahrnuje jak tradiční filmovou fotogrammetrii, tak moderní digitální fotogrammetrii, včetně použití multispektrálních, termálních a hyperspektrálních senzorů.
Fotogrammetrie se dělí na dvě hlavní větve: metrickou fotogrammetrii, která se zaměřuje na přesné měření a geometrickou rekonstrukci za účelem tvorby map, modelů a souřadnic; a interpretační fotogrammetrii (také nazývanou fotointerpretace), která klade důraz na rozpoznávání a identifikaci objektů a posuzování jejich významu z obrazového obsahu. Při inspekci infrastruktury a geodetickém zaměřování dominuje metrická fotogrammetrie, i když interpretační prvky jsou stále více integrovány prostřednictvím automatické extrakce příznaků a strojového učení.
Obor je dále kategorizován podle akviziční platformy: letecká fotogrammetrie (letadlový, dronový nebo satelitní), pozemská fotogrammetrie na krátkou vzdálenost (ruční kamery, stativy nebo robotické systémy) a vesmírná fotogrammetrie (satelitní snímky pro mapování v planetárním měřítku). Moderní dronová inspekce infrastruktury kombinuje leteckou fotogrammetrii a fotogrammetrii na krátkou vzdálenost, přičemž operuje ve výškách 20–120 metrů nad zemí, čímž dosahuje velikosti pixels na zemi (GSD) 0,5–3 cm na pixel.
Matematické principy fotogrammetrického měření
Podmínka kolinearity
Základním matematickým principem, na němž stojí veškerá fotogrammetrie, je podmínka kolinearity. Tato podmínka říká, že pro libovolný bod na snímku leží bod v prostoru, střed promítání kamery a obrazový bod na jedné přímce v trojrozměrném prostoru. Matematicky vyjádřeno, rovnice kolinearity vztahují obrazové souřadnice (x, y) k souřadnicím v prostoru objektu (X, Y, Z) prostřednictvím parametrů vnitřní orientace kamery (ohnisková vzdálenost, souřadnice hlavního bodu) a parametrů vnější orientace (poloha kamery X₀, Y₀, Z₀ a úhly rotace ω, φ, κ).
Rovnice kolinearity tvoří základ všech fotogrammetrických výpočtů:
Kde (x₀, y₀) jsou souřadnice hlavního bodu, f je ohnisková vzdálenost a m₁₁ až m₃₃ jsou prvky rotační matice odvozené z ω, φ, κ. Každé obrazové měření poskytuje dvě rovnice a při dostatečném počtu překrývajících se snímků se systém stává dobře podmíněným, což umožňuje robustní 3D rekonstrukci.
Triangulace a protínání
Triangulace ve fotogrammetrii je proces určování 3D polohy bodu v prostoru protínáním paprsků ze dvou nebo více snímků, které tento bod zachycují z různých perspektiv. Pokud jsou známy polohy a orientace kamer (buď prostřednictvím přímého georeferencování pomocí GNSS/IMU, nebo pomocí procesu zvaného prostorová resekce s využitím známých vlícovacích bodů), lze vypočítat 3D souřadnice libovolného bodu viditelného alespoň na dvou snímcích. To je základní měřicí operace ve fotogrammetrii.
Dopředné protínání vypočítává souřadnice objektu ze známých poloh a orientací snímků. Zpětná resekce určuje polohu a orientaci kamery ze známých bodů v prostoru objektu. V moderní automatizované fotogrammetrii se tyto operace opakují tisíci až milionykrát, přičemž v každém kroku probíhá robustní odmítání odlehlých hodnot a statistická kontrola kvality.
Vyrovnání svazku
Vyrovnání svazku je současné zpřesnění celé sady parametrů definujících fotogrammetrickou rekonstrukci — včetně všech poloh a orientací kamer, všech souřadnic 3D bodů a parametrů kalibrace kamery — s cílem minimalizovat celkovou reprojekční chybu napříč všemi obrazovými měřeními. Název je odvozen od „svazků" světelných paprsků spojujících každou kameru s jejími pozorovanými body. Vyrovnání svazku řeší rozsáhlý nelineární problém nejmenších čtverců, často zahrnující desítky tisíc parametrů pro typické dronové měření. Účelová funkce minimalizuje součet druhých mocnin rozdílů mezi pozorovanými obrazovými souřadnicemi a projektovanými souřadnicemi vypočtenými z aktuálních odhadů parametrů.
Moderní implementace vyrovnání svazku zahrnují robustní ztrátové funkce (jako je Huberovo nebo Cauchyho váhování) pro snížení vlivu odlehlých hodnot z nespárovaných příznaků nebo šumu měření. Techniky řídkých matic využívající přirozené blokové struktury fotogrammetrických sítí — tzv. „hrot šípu" neboli „redukovaný kamerový systém" — umožňují efektivní řešení problémů s miliony pozorování. Kovarianční matice upravených parametrů poskytuje přísné metriky kvality, včetně teoretických odhadů přesnosti pro každý vypočítaný 3D bod.
Pracovní postup Structure from Motion (SfM)
Structure from Motion (SfM) je počítačová vizuální technika, která způsobila revoluci ve fotogrammetrii tím, že umožnila plně automatickou 3D rekonstrukci z neuspořádaných kolekcí snímků. Na rozdíl od klasické fotogrammetrie, která vyžaduje známé polohy kamer a přesně zaměřené vlícovací body jako vstup, SfM současně odhaduje pohyb kamery (polohy a orientace) a strukturu scény (3D body) přímo z korespondencí obrazových příznaků. Pracovní postup SfM se skládá z několika odlišných fází:
Detekce a párování příznaků
Proces začíná detekcí příznaků pomocí algoritmů jako SIFT (Scale-Invariant Feature Transform), SURF (Speeded-Up Robust Features) nebo AKAZE. Tyto detektory identifikují výrazné body v každém snímku — rohy, hrany, texturní oblasti — které jsou invariantní vůči změně měřítka, rotace a osvětlení. Typický 20megapixelový letecký snímek poskytuje 5 000–50 000 příznaků v závislosti na textuře scény. Každý příznak je popsán vysokorozměrným deskriptorovým vektorem (128 dimenzí pro SIFT), který umožňuje robustní párování napříč snímky.
Párování příznaků identifikuje odpovídající body napříč páry snímků. Pro typické dronové měření se 100–500 snímky by párování hrubou silou vyžadovalo 5 000–125 000 srovnání párů snímků. Moderní implementace SfM používají indexování pomocí stromu slovní zásoby nebo exhaustive strategie párování optimalizované pomocí GPU akcelerace. Párování je filtrováno pomocí geometrických omezení — fundamentální matice nebo homografie — k vyloučení odlehlých hodnot prostřednictvím RANSAC (Random Sample Consensus) nebo podobných robustních metod odhadu.
Inkrementální rekonstrukce
Fáze inkrementální rekonstrukce začíná výběrem počátečního páru snímků, obvykle volbou snímků s nejvyšším počtem spolehlivých korespondencí a největší baselinkou (vzdáleností mezi polohami kamer). Tento pár se používá k odhadu relativní orientace mezi dvěma kamerami prostřednictvím rozkladu esenciální matice, čímž se vytváří počáteční souřadnicový rámec. 3D polohy bodů viditelných na obou snímcích jsou poté triangulovány.
Další snímky jsou přidávány jeden po druhém prostřednictvím kroku registrace snímku, který používá algoritmus Perspective-n-Point (PnP) k odhadu polohy a orientace každé nové kamery z jejích korespondencí k již triangulovaným 3D bodům. Po přidání každého snímku se provádí vyrovnání svazku k zpřesnění všech parametrů. Tento inkrementální proces pokračuje, dokud nejsou zaregistrovány všechny snímky. Typické 300snímkové měření může vyžadovat 5–15 iterací vyrovnání svazku během rekonstrukce, přičemž finální vyrovnání zahrnuje všechny parametry současně.
Hustá rekonstrukce
Řídké mračno bodů ze SfM — typicky několik set tisíc bodů — poskytuje pouze geometrickou kostru scény. Hustá rekonstrukce používá algoritmy Multi-View Stereo (MVS) k vytvoření výrazně hustšího mračna bodů. Pro každý snímek jsou vypočítány hloubkové mapy vyhledáváním korespondencí pixelů v okolních snímcích podél epipolárních linií. Semi-Global Matching (SGM) a PatchMatch jsou oblíbené algoritmy pro tuto fázi.
Výsledné husté mračno bodů typicky obsahuje 10–100 milionů bodů pro standardní průzkum infrastruktury, s hustotou bodů 1 000–10 000 bodů na metr čtvereční při typických výškách dronového měření. Toto husté mračno tvoří základ pro všechny následné generované výstupy, včetně sítí, ortomozajek a digitálních modelů povrchu.
Fáze zpracování
Vstup
Výstup
Typické měřítko (300snímkové měření)
Detekce příznaků
Surové snímky
Klíčové body + deskriptory
500 000–5 000 000 příznaků
Párování příznaků
Klíčové body
Spárované korespondence
100 000–1 000 000 korespondencí
Řídká rekonstrukce
Korespondence + metadata kamery
Řídké mračno bodů + pozice kamer
50 000–200 000 3D bodů
Hustá MVS
Řídký model + snímky
Husté mračno bodů
10 000 000–100 000 000 bodů
Generování sítě
Husté mračno bodů
3D síť
500 000–5 000 000 trojúhelníků
Ortomozajka
Síť + snímky
Georeferencovaná obrazová mapa
Rozlišení na pixel na úrovni GSD
Kalibrace kamery a zkreslení objektivu
Kalibrace kamery je proces určování parametrů vnitřní orientace (IOP) kamery — parametrů, které definují geometrický vztah mezi rovinou snímku a středem promítání kamery. Tyto parametry zahrnují ohniskovou vzdálenost (f), souřadnice hlavního bodu (x₀, y₀) a koeficienty zkreslení objektivu. Přesná kalibrace je nezbytná, protože i malé chyby v IOP se přímo promítají do chyb 3D měření.
Brownův-Conradyho model zkreslení
Nejpoužívanějším matematickým modelem pro zkreslení objektivu ve fotogrammetrii je Brownův-Conradyho model, který rozděluje zkreslení na radiální a decentralizační složku:
Kde r je radiální vzdálenost od hlavního bodu, K₁, K₂, K₃ jsou koeficienty radiálního zkreslení a P₁, P₂ jsou koeficienty decentralizačního (tangenciálního) zkreslení. Moderní dronové kamery s širokoúhlými objektivy typicky vykazují významné radiální zkreslení, často přesahující 50–100 pixelů v rozích snímku u rybích ok na spotřebitelských dronech. U metrických kamer s kalibrovanými objektivy je zkreslení obvykle pod 2–3 pixely.
Kalibrační metody
Ve fotogrammetrii se používají tři hlavní kalibrační metody:
Laboratorní kalibrace používá specializované optické lavice a goniometry k měření geometrických vlastností kamery za kontrolovaných podmínek. Toto je nejpřesnější metoda, dosahující nejistoty kalibrace 0,1–0,3 pixelu, ale vyžaduje specializované vybavení a kontrolované prostředí. Národní metrologické instituty a specializované kalibrační laboratoře tuto službu nabízejí a je vyžadována normou ISO/TS 19159-1 pro určité geodetické aplikace.
Polní kalibrace používá kalibrační testovací pole — pole zaměřených terčů s přesně známými 3D souřadnicemi. Kamera snímá testovací pole z více pozic a vyrovnání svazku řeší jak parametry kamery, tak validaci známých souřadnic. Tato metoda je široce používána pro certifikaci leteckých kamer a je základem norem EuroDAC² (European Digital Aerial Camera Certification), které informovaly normu ISO/TS 19159-1.
Samokalibrace (neboli kalibrace za provozu) odhaduje parametry kamery současně s 3D rekonstrukcí během vyrovnání svazku. Toto je standardní přístup v SfM software a je pozoruhodně účinný, když geometrie obrazové sítě poskytuje dostatečná omezení. Samokalibrace vyžaduje konvergentní snímky (neparalelní optické osy), různé úhly natočení a dobrou texturu scény. Většina moderního fotogrammetrického softwaru implementuje samokalibraci jako výchozí možnost a u dronových měření typicky dosahuje přesnosti kalibrace v rozmezí 0,3–0,5 pixelu.
Vliv kalibrace na měření infrastruktury
Pro aplikace inspekce infrastruktury kalibrace kamery přímo určuje kvalitu měření. Špatně kalibrovaná kamera se zbytkovým zkreslením pouhých 5 pixelů může způsobit chyby měření 1–3 cm při typických výškách měření — což je dost na maskování malých trhlin (typicky 0,3–3 mm širokých) nebo generování falešně pozitivních výsledků v analýzách změn. Norma ISO/TS 19159-1 specifikuje kalibrační postupy a požadavky na vykazování pro optické senzory používané v mapování, stanovující minimální standardy pro nejistotu ohniskové vzdálenosti (0,01 % nebo lépe) a nejistotu hlavního bodu (0,5 pixelu nebo lépe).
Pozemní vlícovací body a přesnost
Co jsou pozemní vlícovací body?
Pozemní vlícovací body (GCP) jsou fyzicky označené body na zemi s přesně zaměřenými souřadnicemi, typicky měřené GNSS přijímači pracujícími v režimu RTK nebo statického post-processingu k dosažení centimetrové přesnosti. GCP jsou primárním mechanismem pro zajištění absolutní přesnosti — míry, do jaké fotogrammetrická rekonstrukce odpovídá reálným souřadnicím — na rozdíl od relativní přesnosti, která popisuje vnitřní geometrickou konzistenci.
Každý GCP se skládá z viditelného terče (typicky vysoce kontrastní černo-bílý šachovnicový vzor nebo kříž) o rozměrech 30–60 cm pro dronová měření s GSD 5–10 cm, nebo větší pro lety ve vyšších nadmořských výškách. Střed terče je zaměřen s přesností lepší, než je požadovaná přesnost finálního produktu — typicky 1–2 cm horizontálně a 2–3 cm vertikálně. Souřadnice GCP jsou vztaženy k definovanému souřadnicovému referenčnímu systému (CRS), kterým je pro letectví a většinu infrastrukturních aplikací WGS84 (ITRF) s vhodnou projekcí pro danou lokalitu.
Strategie rozmístění GCP
Prostorové rozmístění GCP významně ovlivňuje přesnost výsledné rekonstrukce. Mezi klíčové zásady pro umístění GCP patří:
Obvodové umístění: Alespoň jeden GCP poblíž každého rohu měřené oblasti omezuje celkovou geometrii a zabraňuje deformacím nebo „mísovým" efektům na okrajích. Pro obdélníkové měřené oblasti je standardem minimálně čtyři obvodové GCP.
Vnitřní rozmístění: Další GCP uvnitř měřené oblasti zlepšují přesnost, zejména v oblastech s topografickými změnami. U měření s výškovými rozdíly přesahujícími 10 % letové výšky by měly být GCP umístěny na výškových extrémech pro kontrolu vertikální přesnosti.
Hustota: Normy ASPRS Positional Accuracy Standards for Digital Geospatial Data (vydání 2024) a ISO 19157 poskytují vodítko pro hustotu GCP. Pro mapování v měřítku 1:100 (typické pro inspekci infrastruktury) se doporučuje 1 GCP na 2–4 hektary, s minimálně 5–8 GCP na projekt bez ohledu na rozlohu. Výzkumy konzistentně ukazují klesající výnosy nad 10–15 dobře rozmístěných GCP pro oblasti pod 100 hektarů.
Kontrolní body a nezávislá validace
Kontrolní body (CP) jsou zaměřené body se stejnou přesností jako GCP, ale záměrně vyřazené z fotogrammetrického zpracování. Po výpočtu modelu pomocí GCP jsou souřadnice kontrolních bodů extrahovány z modelu a porovnány se zaměřenými hodnotami. Rozdíly — rezidua — poskytují nezávislé hodnocení přesnosti. Normy jako ASPRS 2024 a ICAO Annex 15 vyžadují vykazování přesnosti na základě kontrolních bodů, nikoli GCP, aby se předešlo optimistickému zkreslení použitím stejných bodů jak pro řízení, tak pro validaci.
Metrika
Vzorec
Interpretace
RMSEₓ
√(Σ(Δx²)/n)
Střední kvadratická chyba v souřadnici X
RMSEᵧ
√(Σ(Δy²)/n)
Střední kvadratická chyba v souřadnici Y
RMSEz
√(Σ(Δz²)/n)
Střední kvadratická chyba v souřadnici Z
RMSEᵣ
√(RMSEₓ² + RMSEᵧ²)
Planimetrická (horizontální) RMSE
CE90
1,7308 × RMSEᵣ
Kruhová chyba na 90% spolehlivosti (horizontální)
LE90
1,6449 × RMSEz
Lineární chyba na 90% spolehlivosti (vertikální)
Pro aplikace inspekce infrastruktury typické požadavky na přesnost specifikované v ICAO Annex 14 a různých národních normách vyžadují horizontální RMSE lepší než 3 cm a vertikální RMSE lepší než 5 cm pro přesné měření vozovek. Inspekční pracovní postupy TarmacView založené na fotogrammetrii běžně dosahují těchto tolerancí prostřednictvím optimalizovaných sítí GCP a důkladných postupů kontroly kvality.
Fotogrammetrické výstupy
Ortomozajka
Ortomozajka je geometricky opravený, georeferencovaný kompozitní snímek vytvořený sešíváním více leteckých fotografií. Na rozdíl od surových leteckých snímků, které obsahují perspektivní deformace způsobené nakloněním kamery, optikou objektivu a reliéfem terénu, je ortomozajka ortorektifikována — každý pixel je promítnut na svou správnou planimetrickou polohu pomocí DSM a kalibračních dat kamery. Výsledkem je bezešvá obrazová mapa v reálném měřítku, na které lze vzdálenosti měřit přímo, stejně jako na tradiční planimetrické mapě.
Ortomozajky se vytvářejí v nativní velikosti pixels na zemi (GSD) snímků, typicky 0,5–3 cm pro dronové průzkumy infrastruktury. Každý pixel v ortomozajce reprezentuje známý rozměr na zemi, což umožňuje přímé měření liniových prvků (délky trhlin, rozměry značení vozovek, vzdálenosti spár) a výpočet ploch (zóny vydrolování, delaminované úseky, rozsah stojaté vody). Geometrická přesnost ortomozajky se ověřuje analýzou kontrolních bodů a uvádí se jako RMSE.
Digitální model povrchu (DSM)
Digitální model povrchu (DSM) je rastrový výškový model reprezentující zemský povrch včetně všech prvků — budov, vegetace, infrastruktury a terénu. Ve fotogrammetrii se DSM generuje z hustého mračna bodů interpolací výškových hodnot na pravidelnou mřížku. Prostorové rozlišení DSM obvykle odpovídá GSD zdrojových snímků a vertikální přesnost sleduje přesnost mračna bodů.
Pro infrastrukturní aplikace DSM umožňuje:
Analýzu odvodnění: Identifikaci oblastí s tvorbou kaluží, nízkých míst a směru odvodnění na povrchu vozovek
Měření příčného sklonu: Ověření příčného sklonu vozovky oproti projektovým specifikacím (typicky 1,5–2,5 % pro letištní dráhy dle ICAO)
Extrakci podélného profilu: Měření rovnosti povrchu vozovky, změn sklonu a vertikálního vedení
Výpočet objemu výkopu/násypu: Kvantifikaci objemů materiálu pro projekty rehabilitace vozovek
Husté mračno bodů
Husté mračno bodů je primární 3D výstup fotogrammetrického zpracování, obsahující miliony až miliardy georeferencovaných 3D bodů s přidruženými barevnými hodnotami ze zdrojových snímků. Každý bod má souřadnice (X, Y, Z) a barvu RGB, což umožňuje realistickou vizualizaci a přesné měření. Mračna bodů se obvykle exportují v průmyslových standardních formátech včetně LAS, LAZ (komprimovaný LAS), PLY nebo XYZ textových souborů.
Hustota bodů se liší podle parametrů měření. Při letové výšce 50 m s 20 MP kamerou, 70% podélným překrytím a 70% příčným překrytím se dosahuje typické hustoty 500–2 000 bodů/m². Při inspekci mostních prvků nebo fasád budov na krátkou vzdálenost může hustota dosáhnout 10 000–100 000 bodů/m².
3D síť
3D síť je triangulovaný povrchový model odvozený z hustého mračna bodů, typicky pomocí Poissonovy rekonstrukce povrchu nebo Delaunayho triangulace. Síť reprezentuje skenovaný povrch jako spojitou varietu trojúhelníkových ploch s texturou aplikovanou ze zdrojových snímků pro fotorealistickou vizualizaci. Síťové modely jsou nezbytné pro:
Vizuální inspekci: Procházení 3D modelu mostu, budovy nebo úseku vozovky k identifikaci vad
Tvorbu digitálních dvojčat: Poskytování geometrického základu pro systémy správy majetku
Analýzu konečných prvků: Převod geometrie sítě na modely pro inženýrské analýzy
Virtuální prohlídky: Umožnění vzdálené inspekce a komunikace se zainteresovanými stranami
Dronová fotogrammetrie pro inspekci infrastruktury
Dronová fotogrammetrie se stala dominantní metodou pro inspekci infrastruktury v mnoha odvětvích, nabízející významné výhody oproti tradičním inspekčním metodám. Kombinace automatického plánování letu, vysoce rozlišených kamer, RTK/PPK GNSS polohování a SfM fotogrammetrického zpracování umožňuje rychlou, komplexní a přesnou dokumentaci stavu velkých infrastrukturních aktiv.
Plánování letu pro průzkumy infrastruktury
Efektivní fotogrammetrické průzkumy vyžadují pečlivé plánování letu k zajištění úplného pokrytí, odpovídajícího překrytí a vhodné GSD. Mezi klíčové parametry patří:
Letová výška: Určuje GSD (Ground Sample Distance). GSD = velikost pixelu senzoru × výška / ohnisková vzdálenost. Pro typickou 20 MP kameru s ohniskovou vzdáleností 24 mm poskytuje let ve výšce 50 m GSD = 1,1 cm/pixel. Pro detekci trhlin, kde je třeba rozlišit submilimetrové trhliny, by GSD neměla přesáhnout 2–3 mm/pixel, což vyžaduje letové výšky 15–30 m.
Překrytí: Podélné překrytí 80–90 % a příčné překrytí 70–80 % jsou standardem pro průzkumy infrastruktury. Vyšší překrytí zvyšuje dobu zpracování, ale zlepšuje kvalitu rekonstrukce, zejména u povrchů s omezenou texturou (např. čerstvý beton, asfalt).
Akvizice snímků: Nadirní (svislé) snímky jsou standardem pro plošné mapování, ale šikmé snímky pod úhlem 15–45° od svislice zlepšují rekonstrukci svislých ploch, jako jsou mostní pilíře, fasády budov a opěrné zdi. Některé průzkumy kombinují nadirní a šikmé lety pro kompletní 3D pokrytí.
RTK/PPK polohování: Drony vybavené RTK (Real-Time Kinematic) nebo PPK (Post-Processed Kinematic) GNSS zaznamenávají polohy kamer s přesností 2–5 cm, což výrazně snižuje počet potřebných GCP. S RTK lze dosáhnout absolutní přesnosti 3–5 cm s pouhými 0–3 GCP u dobře strukturovaných měření.
Aplikace v inspekci infrastruktury
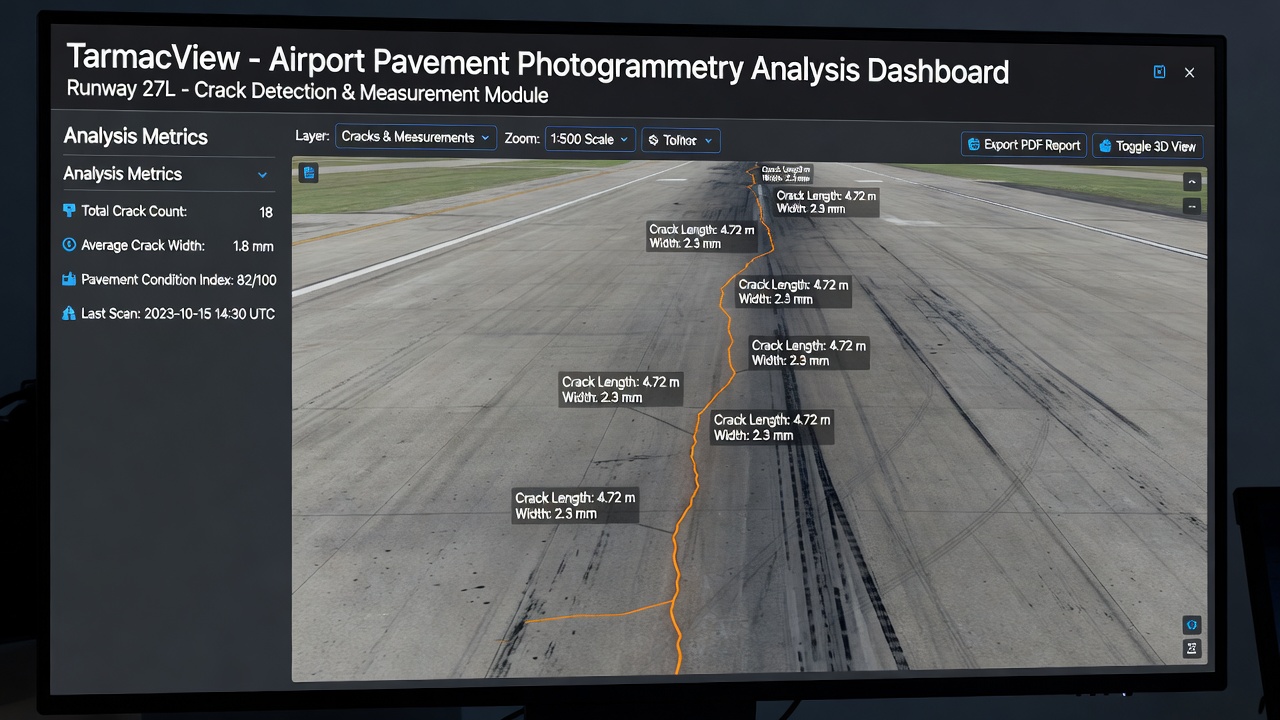
Hodnocení stavu vozovek: Fotogrammetrie umožňuje automatickou detekci a měření poškození vozovek včetně trhlin (alianátorové, podélné, příčné, blokové), vyjetých kolejí, vydrolování, vytékání pojiva a poklesů. Šířky trhlin 0,5–3 mm lze spolehlivě měřit z ortomozajek s GSD 1–2 mm, což umožňuje výpočet PCI (Pavement Condition Index) podle ASTM D5340 pro letištní vozovky. Platforma TarmacView se specializuje na tuto aplikaci a integruje fotogrammetrické měření s automatickou klasifikací poškození a reportingem PCI.
Inspekce mostů: Fotogrammetrie na krátkou vzdálenost z dronů poskytuje komplexní dokumentaci mostních prvků včetně povrchů mostovek, nosníků, ložisek, opěr a pilířů. Hustá mračna bodů umožňují měření průhybů při zatěžovacích zkouškách, mapování trhlin na betonových površích, posouzení koroze ocelových prvků a ověření průjezdných profilů. FHWA a národní normy pro inspekci mostů stále více uznávají dronovou fotogrammetrii jako akceptovanou metodu pro běžné a hloubkové inspekce.
Inspekce budov a fasád: Fotogrammetrické průzkumy vnějších plášťů budov detekují praskliny fasád, odprýskávání, výkvěty, vlhkostní skvrny a strukturální deformace. Termální fotogrammetrie (pomocí termokamer) rozšiřuje inspekční schopnosti na podpovrchové pronikání vlhkosti, izolační vady a delaminaci.
Měření objemů: Výpočet objemu skládek, kvantifikace výkopů a monitorování eroze jsou standardní fotogrammetrické aplikace. Přesnost objemů 1–3 % je běžně dosažitelná, validovaná proti vážním měřením.
Detekce změn: Porovnávání sekvenčních fotogrammetrických průzkumů stejného aktiva umožňuje kvantifikaci strukturálních deformací, sedání, eroze, šíření trhlin a postupu výstavby. Práh detekce závisí na přesnosti měření: při průzkumech s RMSE 2 cm lze spolehlivě detekovat změny 4–5 cm na 95% spolehlivosti.
Infrastrukturní aktivum
Typická GSD
Dosažená přesnost (s GCP)
Klíčová měření
Letištní dráhová vozovka
1–3 mm/pixel
2–5 mm horizontálně, 3–8 mm vertikálně
Šířka trhlin, PCI, hloubka kolejí, příčný sklon
Dálniční vozovka
3–5 mm/pixel
5–10 mm horizontálně, 8–15 mm vertikálně
IRI, mapování trhlin, stav krajnic
Mostní konstrukce
2–5 mm/pixel
3–8 mm na vzdálenost 30 m
Průhyb, mapování trhlin, průjezdný profil
Fasáda budovy
3–10 mm/pixel
5–15 mm na vzdálenost 50 m
Mapování trhlin, odprýskávání, vlhkostní zóny
Zemní práce/skládky
2–5 cm/pixel
3–5 cm horizontálně, 5–10 cm vertikálně
Objem ±1–3 %, mapování výkopu/násypu
Hodnocení přesnosti a kontrola kvality
Role kontrolních bodů
Nezávislé ověření přesnosti pomocí kontrolních bodů je zlatým standardem fotogrammetrického zajištění kvality. Postup se řídí přísným protokolem:
Minimálně 20 kontrolních bodů by mělo být zřízeno pro projekty do 100 hektarů (nebo 10 % počtu GCP, podle toho, co je větší), rozmístěných po celé měřené oblasti s důrazem na obtížný terén, okraje a oblasti kritické pro cíle projektu.
Souřadnice kontrolních bodů se měří v terénu pomocí geodetické GNSS s přesností nejméně 3krát lepší, než je očekávaná fotogrammetrická přesnost.
Po fotogrammetrickém zpracování jsou 3D souřadnice každého kontrolního bodu extrahovány z mračna bodů nebo ortomozajky kvalifikovaným analytikem.
Rezidua — rozdíly mezi zaměřenými a fotogrammetrickými souřadnicemi — jsou vypočítána pro každý kontrolní bod.
RMSE, CE90 a LE90 jsou vypočítány a porovnány s požadavky projektu na přesnost.
Normy a shoda
Normy polohové přesnosti ASPRS pro digitální geoprostorová data (vydání 2024) nahrazují dřívější normy ASPRS a NSSDA. Norma definuje třídy přesnosti vázané na prahové hodnoty RMSE:
Třída přesnosti
Horizontální RMSE (cm) v měřítku 1:100
Vertikální RMSE (cm)
ASPRS Třída I
1,25
1,9
ASPRS Třída II
2,5
3,8
ASPRS Třída III
5,0
7,5
ASPRS Třída IV
10,0
15,0
ASPRS Třída V
25,0
37,5
Pro inspekci letištních vozovek odpovídají požadavky ICAO Annex 14 na průzkumy stavu povrchu typicky třídě ASPRS II nebo lepší, v závislosti na konkrétní aplikaci. Inspekční pracovní postupy TarmacView cílí na přesnost třídy I–II pro přesné měření trhlin a třídy III pro plošné mapování stavu.
Detekce systematických chyb
Kromě RMSE musí kontrola kvality řešit systematické chyby, které se nemusí projevit ve statistice RMSE. Metody detekce systematických chyb zahrnují:
Vykreslování reziduí: Vykreslování reziduí kontrolních bodů proti souřadnicím X, Y a Z k identifikaci prostorových trendů (např. rostoucí chyba směrem k okrajům)
Histogramová analýza: Kontrola distribuce reziduí na normalitu — nenormální distribuce naznačují nemodelované systematické efekty
Časová analýza: U opakovaných měření vykreslování reziduí proti času nebo parametrům měření k detekci driftu nebo sezónních efektů
Křížová validace: Rozdělení GCP do více podmnožin a porovnání rekonstrukcí k posouzení robustnosti
Měřicí schopnosti založené na fotogrammetrii
Měření šířky trhlin
Přesné měření trhlin z fotogrammetrických dat vyžaduje techniky měření na úrovni sub-pixelu. Metoda extrahované detekce hran na sub-pixelové úrovni prokládá funkci odezvy hrany přes rys trhliny k určení jejích okrajů s přesností 0,1–0,2 pixelu. Při GSD 1 mm/pixel to odpovídá měření šířky trhlin s přesností 0,1–0,2 mm. Validační studie na letištních vozovkách prokazují, že fotogrammetrická měření šířky trhlin souhlasí s manuálními mikrometrickými měřeními v rozmezí ±0,3 mm u trhlin o šířce 0,5–10 mm.
Automatizovaná detekční linka trhlin TarmacView integruje fotogrammetrické ortomozajky s modely segmentace hlubokého učení (typicky založenými na architekturách U-Net nebo DeepLab) trénovanými na tisících označených snímků poškození vozovek. Detekované trhliny jsou vektorizovány, měřeny a klasifikovány podle typu, šířky a závažnosti podle ASTM D5340 a směrnic ICAO pro hodnocení vozovek.
Měření ploch a objemů
Měření ploch z ortomozajek je v principu přesné, protože ortomozajka je reprezentace zemského povrchu v reálném měřítku bez deformací. Přesnost měření ploch závisí na přesnosti vymezení hranice, která je typicky v rozmezí 2–3 pixelů. U oblastí s poškozením vozovky (odprýskávání, záplaty, vydrolování) je běžně dosažitelná přesnost plochy 95–98 %.
Měření objemů vyžaduje DSM nebo mračno bodů povrchu před a po změně, nebo předem existující referenční povrch. Objem mezi dvěma povrchy se vypočítá odečtením výškových hodnot v každé buňce mřížky a sečtením součinu výškového rozdílu a plochy buňky. Pro měření objemu skládek je standardní přesnost 1–3 % oproti validaci vážním měřením. Pro objem frézování nebo překrývání vozovek je typická přesnost 2–5 % v závislosti na textuře povrchu a kvalitě měření.
Monitorování deformací
Opakované fotogrammetrické průzkumy stejného aktiva umožňují monitorování deformací prostřednictvím přímého porovnání mračen bodů nebo DSM. Metoda Cloud-to-Cloud (C2C) vypočítává vzdálenosti nejbližších sousedů mezi dvěma mračny bodů. Algoritmus Multiscale Model-to-Model Cloud Comparison (M3C2) poskytuje statisticky rigorózní výpočet vzdálenosti s intervaly spolehlivosti, zohledňující nejistotu mračna bodů a drsnost povrchu.
Pro monitorování průhybů mostů dosahují fotogrammetrická měření při statickém zatížení typicky přesnosti 2–5 mm na vzdálenosti 20–50 m, což je konkurenceschopné s tradičními číselníkovými úchylkoměry a totálními stanicemi. Dynamické monitorování průhybů zůstává pro fotogrammetrii výzvou kvůli požadavkům na synchronizaci mezi více kamerami, ačkoli stereofotogrammetrické systémy prokázaly přesnost 1 mm při 100 Hz v laboratorních testech.
Integrace s inspekčními pracovními postupy
Kompletní inspekční pipeline
Fotogrammetrie se integruje do pracovních postupů inspekce infrastruktury prostřednictvím strukturované pipeline:
Fáze 1 — Plánování: Definování cílů inspekce, požadované přesnosti, charakteristik aktiva a omezení na místě. Výběr obrazového senzoru, letové výšky, parametrů překrytí a návrh sítě GCP. Získání povolení k letu a koordinace vzdušného prostoru tam, kde je to vyžadováno.
Fáze 2 — Terénní akvizice: Rozmístění a zaměření GCP. Provedení automatizované letové mise s naprogramovanými waypointy, překrytím a intervaly spouštění kamery. Při inspekci infrastruktury zkontrolovat kvalitu snímků v terénu pro zajištění adekvátního zaostření, expozice a pokrytí.
Fáze 3 — Fotogrammetrické zpracování: Přenos snímků do zpracovatelského softwaru. Provedení kontroly kvality metadat snímků a GNSS logů. Spuštění SfM zpracování: extrakce příznaků, párování, řídká rekonstrukce, identifikace a označení GCP, vyrovnání svazku, hustá rekonstrukce, generování DSM/ortomozajky. Validace přesnosti pomocí kontrolních bodů. U velkých projektů trvá zpracování 300snímkového měření při 20 MP přibližně 4–8 hodin na moderní pracovní stanici s GPU akcelerací.
Fáze 4 — Analýza a měření: Import ortomozajky, DSM a mračna bodů do analytického softwaru. Provedení detekce poškození (automatické nebo manuální), měření trhlin, výpočtu ploch, výpočtu objemů nebo deformační analýzy. Generování inspekčních zpráv s měřeními, snímky a prohlášeními o přesnosti.
Fáze 5 — Archivace a monitorování: Uložení fotogrammetrických dat včetně metadat s datem, přesností, souřadnicovým referenčním systémem a parametry senzoru. Porovnání s historickými průzkumy pro detekci změn. Aktualizace systémů správy majetku výsledky inspekce.
Regulační rámce pro fotogrammetrickou inspekci
Několik mezinárodních a národních norem upravuje použití fotogrammetrie pro inspekci infrastruktury:
ICAO Annex 14 — Letiště: Specifikuje geometrické normy pro povrchy drah, včetně podélného sklonu, příčného sklonu a stavu povrchu. ICAO Doc 9157 (Manuál pro návrh letišť) poskytuje vodítko pro metody průzkumu včetně fotogrammetrie pro hodnocení vozovek.
ICAO Annex 15 — Letecké informační služby: Stanovuje požadavky na kvalitu leteckých dat včetně průzkumných dat s požadavky na přesnost odpovídající kritičnosti dat.
ICAO Annex 6, Part IV — Operace RPAS: Řídí operace dronů pro inspekční mise, vyžadující certifikaci operátora, licencování pilotů na dálku a shodu s letovou způsobilostí pro mezinárodní operace podle Annex 6 Part IV a ICAO Doc 10019.
ISO/TS 19159-1:2014: Specifikuje kalibrační postupy pro optické senzory používané v mapování a inspekčních aplikacích, včetně laboratorních, in-situ a testovacích kalibračních metod.
ISO 19130-1:2018 — Modely obrazových senzorů pro geopozicování: Definuje rámec pro senzorové modely vztahující obrazové souřadnice k zeměpisným souřadnicím, nezbytný pro interoperabilitu fotogrammetrického zpracovatelského softwaru.
ISO 19157 — Kvalita dat: Stanovuje principy pro vykazování kvality dat v geografických informacích, včetně úplnosti, logické konzistence, polohové přesnosti, časové přesnosti a tematické přesnosti.
Nástroje fotogrammetrického softwaru
Komerční řešení
Agisoft Metashape je všeobecně považován za průmyslový standard pro dronovou fotogrammetrii, nabízející komplexní zpracování od vyrovnání snímků přes hustou rekonstrukci, generování DSM/ortomozajky až po měření. Podporuje skriptování v Pythonu pro automatizaci pracovních postupů, což z něj činí oblíbený nástroj pro inspekční pipeline infrastruktury. Metashape zvládá projekty od malého měřítka objektů až po rozsáhlé průzkumy oblastí (10 000+ snímků) prostřednictvím síťového zpracování.
Pix4Dmapper poskytuje integrované fotogrammetrické řešení speciálně optimalizované pro dronové průzkumy s automatickým reportingem kvality, správou GCP a hodnocením přesnosti. Pix4Dmatic rozšiřuje zpracování na velmi velké projekty. Ekosystém Pix4D zahrnuje specializované moduly pro zemědělství, stavebnictví a inspekci.
RealityCapture (od Epic Games/Capturing Reality) je známý svou výjimečnou rychlostí a kvalitou zpracování, zejména pro fotogrammetrii na krátkou vzdálenost u staveb a objektů. Je široce používán v odvětví digitálních dvojčat a dokumentace památek. Jeho GPU akcelerovaná zpracovatelská pipeline patří k nejrychlejším dostupným.
Bentley ContextCapture je přední řešení pro rozsáhlou infrastrukturní fotogrammetrii, integrující se s širším ekosystémem digitálních dvojčat a BIM společnosti Bentley. Je široce používán v dopravních, energetických a stavebně-inženýrských aplikacích.
Open-source řešení
OpenDroneMap (ODM) je nejvýznamnější open-source fotogrammetrická platforma, poskytující kompletní SfM a MVS zpracovatelské pipeline. Podporuje ovládání z příkazové řádky i webové rozhraní, což jej činí vhodným pro automatizované zpracovatelské linky. Kvalita a přesnost ODM se výrazně zlepšily a nyní se pro mnoho aplikací přibližují úrovni komerčního softwaru.
Meshroom (od AliceVision) je open-source fotogrammetrický rámec s uzlově orientovaným grafickým rozhraním, přístupný pro výzkum a vzdělávání a zároveň podporující pokročilé funkce včetně HDR rekonstrukce a fúze hloubkových map.
COLMAP je víceúčelová SfM a MVS knihovna široce používaná ve výzkumu počítačového vidění, nabízející nejmodernější kvalitu párování příznaků a rekonstrukce. Je ovládána z příkazové řádky a běžně integrována do vlastních zpracovatelských pipeline.
Integrace TarmacView
Inspekční platforma TarmacView integruje fotogrammetrické principy do svého jádra, zpracovává dronové snímky letištních vozovek k vytvoření precizních ortomozajek s GSD 1–3 mm s ověřenou přesností. Platforma automatizuje detekci a měření trhlin pomocí počítačového vidění a hlubokého učení, vypočítává Index stavu vozovky (PCI) podle ASTM D5340, sleduje změny prostřednictvím časového porovnání po sobě jdoucích průzkumů a generuje inspekční zprávy v souladu s ICAO. Kombinací fotogrammetrické přesnosti s automatizovanou analýzou poškození umožňuje TarmacView správcům infrastruktury přejít od subjektivní vizuální inspekce k objektivnímu, měřitelnému a daty řízenému hodnocení stavu vozovek.
Reference
American Society for Photogrammetry and Remote Sensing (ASPRS). Positional Accuracy Standards for Digital Geospatial Data. Vydání 2024.
International Civil Aviation Organization. Annex 14 — Aerodromes, Volume I: Aerodrome Design and Operations. 8. vydání, 2018.
International Civil Aviation Organization. Doc 9157 — Aerodrome Design Manual, Part 3: Pavements. 2. vydání, 2002.
International Civil Aviation Organization. Doc 10019 — Manual on Remotely Piloted Aircraft Systems (RPAS). 2015.
International Organization for Standardization. ISO/TS 19159-1:2014 — Geographic Information — Calibration and Validation of Remote Sensing Imagery Sensors and Data — Part 1: Optical Sensors.
International Organization for Standardization. ISO 19130-1:2018 — Geographic Information — Imagery Sensor Models for Geopositioning — Part 1: Fundamentals.
International Organization for Standardization. ISO 19157:2013 — Geographic Information — Data Quality.
Luhmann, T., Robson, S., Kyle, S., & Boehm, J. Close-Range Photogrammetry and 3D Imaging. 3. vydání, De Gruyter, 2019.
ASTM D5340-19. Standard Test Method for Airport Pavement Condition Index Surveys.
Federal Highway Administration. Bridge Inspection Practices Using Unmanned Aerial Systems. FHWA-HIF-19-002, 2019.
Často kladené otázky
Fotogrammetrie je věda o měření z fotografií. Funguje tak, že pořizuje překrývající se snímky objektu nebo oblasti z různých pozic a poté pomocí triangulace vypočítává 3D souřadnice. Software identifikuje společné body (vlícovací body) na překrývajících se snímcích, zpětně promítá světelné paprsky k jejich zdrojům pomocí podmínky kolinearity a řeší 3D polohy prostřednictvím vyrovnání svazku. Výstupem jsou mračna bodů, digitální modely povrchu, ortomozajky a 3D sítě s přesností na centimetry až milimetry.
Fotogrammetrie používá pasivní optické senzory (kamery) a spoléhá na přirozené světlo a texturu snímku k rekonstrukci 3D geometrie. LiDAR je aktivní senzor, který vysílá laserové pulsy a měří dobu návratu k přímému měření vzdáleností. Fotogrammetrie vyniká ve vizuální textuře, barevných informacích a nákladově efektivním pokrytí velkých oblastí. LiDAR proniká vegetací, funguje ve tmě a vytváří přesná mračna bodů i na málo texturovaných površích. Mnoho projektů kombinuje obě metody pro optimální výsledky.
Se správnými pozemními vlícovacími body (GCP) a RTK/PPK GNSS dosahuje dronová fotogrammetrie běžně horizontální přesnosti 1–3 cm a vertikální přesnosti 2–5 cm vzhledem k síti GCP. Bez GCP přesnost obvykle klesá na 2–5 m horizontálně a 5–20 m vertikálně v závislosti na kvalitě palubního GNSS dronu. Přesnost se ověřuje pomocí nezávislých kontrolních bodů a uvádí se jako RMSE podle norem, jako jsou standardy polohové přesnosti ASPRS.
Profesionální letecká fotogrammetrie vyžaduje 70–90% podélné překrytí a 60–80% příčné překrytí mezi snímky. To zajišťuje, že každý bod na zemi je zachycen alespoň na 3–5 snímcích pro robustní triangulaci. Pro fotogrammetrii na krátkou vzdálenost u konstrukcí je standardem 80% překrytí v obou směrech. Přesný počet závisí na velikosti oblasti, velikosti pixels na zemi (GSD), specifikacích kamery a složitosti scény.
Structure from Motion (SfM) je počítačová vizuální technika, která současně řeší polohy kamer, orientace a 3D geometrii scény ze sady překrývajících se snímků. Na rozdíl od klasické fotogrammetrie, která vyžaduje známé polohy kamer a GCP předem, SfM automaticky odhaduje parametry kamery a řídké 3D body pouze z korespondencí obrazových příznaků. Následně vše zpřesňuje pomocí vyrovnání svazku. SfM způsobilo revoluci v dronové fotogrammetrii tím, že umožnilo plně automatickou 3D rekonstrukci z neorientovaných sad snímků.
Mezi hlavní výstupy patří: (1) Ortomozajka – geometricky opravená, georeferencovaná 2D obrazová mapa s jednotným měřítkem; (2) Digitální model povrchu (DSM) – 3D výškový model zachycující všechny povrchové prvky včetně vegetace a staveb; (3) Digitální model terénu (DTM) – výškový model holého terénu bez vegetace a staveb; (4) Husté mračno bodů – miliony až miliardy 3D bodů reprezentujících skenovaný povrch; (5) 3D síť – triangulovaný povrchový model pro vizualizaci a analýzu; a (6) Vrstevnice – výškové izočáry odvozené z DSM nebo DTM.
Fotogrammetrie umožňuje bezkontaktní měření a dokumentaci stavu infrastruktury. Mezi aplikace patří: detekce trhlin a měření šířky na letištních drahách a silnicích; monitorování průhybů mostů a deformační analýza; výpočet objemu skládek, výkopů a eroze; mapování povrchové degradace betonu a asfaltu; ověření skutečného provedení oproti návrhovým modelům; detekce historických změn prostřednictvím časového srovnání opakovaných měření; a tvorba digitálních dvojčat pro systémy správy majetku.
Mezi přední fotogrammetrické softwary patří Agisoft Metashape, Pix4Dmapper, Bentley ContextCapture, RealityCapture (Capturing Reality), 3DF Zephyr, DroneDeploy a OpenDroneMap (open-source). Pro fotogrammetrii na krátkou vzdálenost a objektovou fotogrammetrii se používají RealityCapture, Meshroom (open-source) a Autodesk ReCap. Tyto nástroje zvládají vyrovnání snímků, hustou rekonstrukci, tvorbu sítě, produkci ortomozajky a extrakci měření. TarmacView integruje fotogrammetrické principy speciálně pro inspekci letištních vozovek a analýzu stavu drah.
Pokročilá fotogrammetrie pro infrastrukturu
Využijte dronovou fotogrammetrii pro přesnou inspekci infrastruktury, analýzu vozovek a 3D mapování. Naše platforma poskytuje přesnost na úrovni geodetického zaměření z leteckých snímků s automatickou detekcí trhlin, výpočtem objemů a analýzou změn.
Slovník topografie, povrchových tvarů a výškopisného měření
Komplexní slovník topografie, povrchových tvarů a výškopisného měření, pokrývající klíčové pojmy, nástroje a technické standardy dle ICAO, USGS a autoritativníc...
6 min čtení
Surveying
Topography
+3
+++ title = “Překryv snímků” description = “Překryv snímků (podélný a příčný překryv) je procento plochy snímku, které je sdíleno mezi po sobě...
Fotometr je přístroj navržený k měření vlastností světla relevantních pro lidské vidění nebo fyzikální energii. Používá se ve fotometrii, kvantifikuje intenzitu...
8 min čtení
Light Measurement
Photometry
+2
Souhlas s cookies Používáme cookies ke zlepšení vašeho prohlížení a analýze naší návštěvnosti. See our privacy policy.