Dronová infračervená termografie využívá termokamery na bezpilotních prostředcích k rychlému průzkumu mostních desek a vozovek za účelem detekce delaminací, odtrhů a vlhkosti ze vzduchu, přičemž pokrývá velké plochy bez přerušení dopravy. AI analýza tepelných vzorců automatizuje detekci vad. Zahrnuje návrh systému dronové IRT, plánování letů pro termální průzkumy, zpracování dat a integraci s vizuální RGB inspekcí.
Dronová infračervená termografie pro inspekci mostů a vozovek
Součásti systému dronové IRT
Systém dronové infračervené termografie (dronová IRT) se skládá z několika kritických subsystémů, které musí spolupracovat, aby produkovaly přesná, georeferencovaná termální data vhodná pro detekci podpovrchových vad. Náklad termokamery je základním senzorem – typicky nechlazená mikrobolometrová dlouhovlnná infračervená (LWIR) kamera pracující ve spektrálním pásmu 7,5–14 µm. Mezi nejběžnější náklady patří DJI Zenmuse H20T (rozlišení 640×512 pixelů, rozteč pixelů 12 µm, ekvivalentní teplotní rozdíl šumu neboli NETD ≤50 mK, clona f/1,0, absolutní přesnost ±2 °C nebo ±2 %), FLIR Vue Pro R (640×512, 12 µm, NETD <50 mK, radiometrická kalibrace, k dispozici s možnostmi objektivů 9 mm, 13 mm nebo 19 mm) a Workswell WIRIS Pro (640×512, NETD 30 mK, 10× kontinuální optický zoom, rozsah měření teploty od −20 °C do +1500 °C). Tyto kamery váží mezi 270 g a 460 g v závislosti na modelu a konfiguraci, což je kompatibilní s nosnostmi komerčních vícerotorových dronů, jako je DJI Matrice 300 RTK (maximální nosnost 2,7 kg) nebo DJI Matrice 350 RTK.
Stabilizace gimbalem
Termokamera musí být namontována na 3osém stabilizovaném gimbalu, který izoluje senzor od vibrací dronu, úhlového pohybu a oscilací způsobených větrem. Bez stabilizace gimbalem by vibrační frekvence z motorů dronu (typicky 150–400 Hz u vícerotorových dronů) a letové dynamiky (náklon, klonění a otáčení během korekcí kurzu) způsobily rozmazání pohybem v termálních snímcích, čímž by se degradovalo prostorové rozlišení a přesnost měření teploty. Špičkové gimbaly, jako je řada DJI Zenmuse, poskytují úhlovou stabilizační přesnost 0,01°, což umožňuje ostré snímání termálních snímků i během dopředného letu rychlostí až 15 m/s (54 km/h). Gimbal také umožňuje přesné nasměrování kamery – kritické pro inspekci svislých mostních prvků (plochy pilířů, opěry, stojiny nosníků), kde musí být kamera orientována kolmo k cílovému povrchu, aby se předešlo chybám měření teploty souvisejícím s emisivitou způsobeným snímáním pod úhlem. Většina gimbalů podporuje automatizované sekvence naklánění a otáčení, které lze naprogramovat do letové mise pro systematické pokrytí z více úhlů u složitých mostních geometrií.
Integrace RTK GPS
Real-Time Kinematic (RTK) GPS je polohovací páteří produkčního systému dronové IRT. RTK poskytuje absolutní polohovou přesnost 2–5 cm horizontálně a 3–7 cm vertikálně tím, že koriguje chyby GPS signálu pomocí pevné základnové stanice se známými souřadnicemi, přenášející korekční data k dronu prostřednictvím rádiového spojení (typicky 900 MHz nebo 2,4 GHz rádiové modemy, nebo 4G/5G celulární sítě pro rozsáhlé operace). Dron zaznamenává polohu RTK, výšku (nad střední hladinou moře), postoj (náklon, klonění, otáčení) a časové razítko spouště kamery pro každý termální snímek – typicky jako EXIF metadata nebo v samostatném telemetrickém souboru synchronizovaném s událostí snímání. Tato geoprostorová metadata umožňují přesnou koregistraci mezi termálními snímky a výkresy mostních plánů, GIS databázemi nebo 3D mračny bodů z LiDAR nebo fotogrammetrických průzkumů. Bez RTK poskytuje standardní GPS pouze přesnost 2–5 m, což je nedostatečné pro spolehlivé lokalizování vad na mostní desce, kde může mít tepelná anomálie průměr pouze 20–30 cm. Některé systémy také integrují Post-Processed Kinematic (PPK) korekci pro operace, kde nejsou k dispozici spojení pro RTK korekci v reálném čase, zpracovávající data základnové stanice po letu pro dosažení ekvivalentní přesnosti.
16+ GB úložiště, telemetrický downlink v reálném čase
Bateriový Systém
Napájení letu a nákladu
30–50 minut letu (hybrid), 20–30 min (elektrický)
Integrace RGB kamery
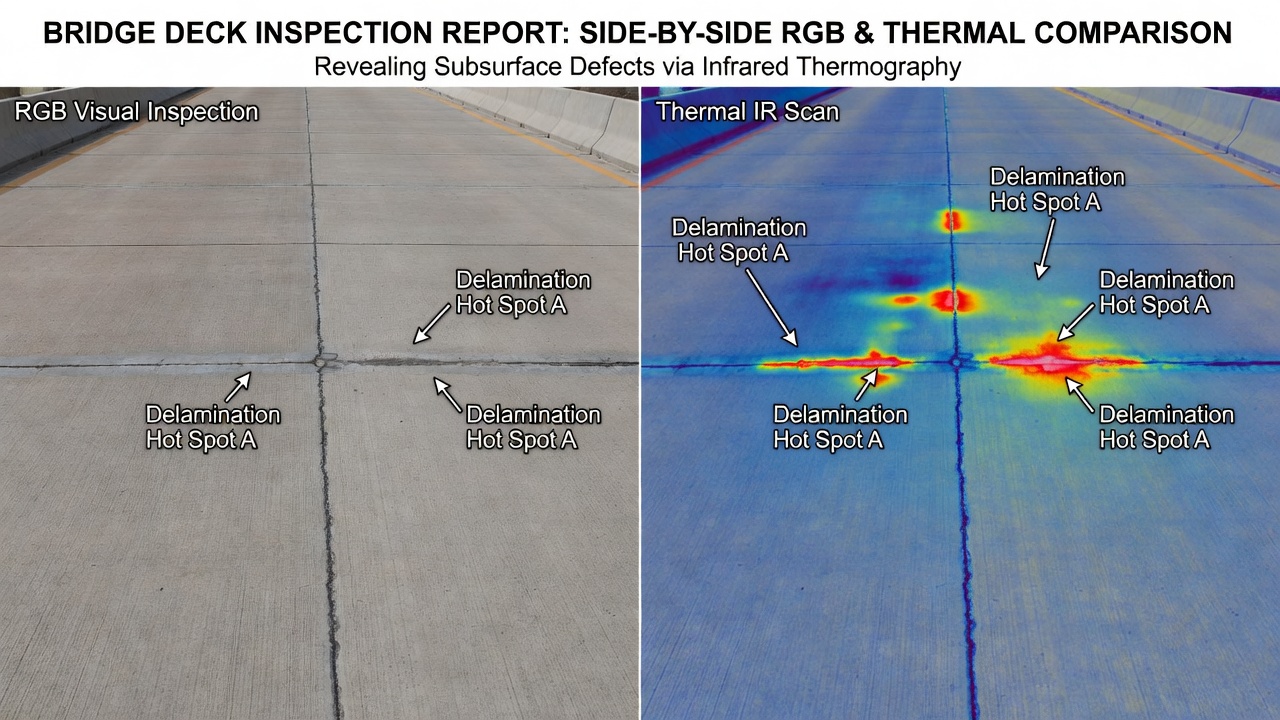
Většina nákladů dronové IRT zahrnuje vysoce rozlišovací RGB kameru umístěnou společně s termálním senzorem, což umožňuje současné snímání viditelného spektra a termálních snímků. DJI Zenmuse H20T například kombinuje termokameru s 20 MP širokoúhlou RGB kamerou, 12 MP teleobjektivem (2× optický zoom) a laserovým dálkoměrem v jediném gimbalovém pouzdře. Současné RGB a termální snímání umožňuje fúzi obrazu – překrytí termálních dat na viditelném snímku pro poskytnutí prostorového kontextu pro interpretaci anomálií. RGB referenční snímek pomáhá analytikovi rozlišit mezi skutečnými tepelnými anomáliemi souvisejícími s vadami a falešnými signály z povrchových prvků, jako jsou olejové skvrny, usazeniny gumy, opravené oblasti, malované značení nebo nečistoty. Potrubí pro následné zpracování může generovat produkty vizualizace s rozdělenou obrazovkou nebo prolnutím, kde je tepelná anomálie (zobrazená v pseudobarvách) průhledně překryta na vysoce rozlišovacím RGB snímku. Tento fúzovaný produkt je výrazně srozumitelnější pro mostní inženýry neznalé interpretace surových termogramů.
Plánování letů pro termální průzkumy
Načasování solárního zatížení
Jediným nejkritičtějším faktorem úspěchu pasivního dronového IRT průzkumu je načasování solárního zatížení – provedení průzkumu, když slunce poskytuje dostatek tepelné energie k vytvoření měřitelných teplotních rozdílů mezi vadnými a zdravými oblastmi. Fyzika je přímočará: sluneční záření proniká povrchem a vede se směrem dolů do materiálu. Vzduchem vyplněná delaminace (tepelná vodivost 0,026 W/mK) blokuje tento vodivý tok tepla, což způsobuje, že se povrch nad ní zahřívá rychleji a dosahuje vyšší teploty než okolní zdravý beton (vodivost 1,7–2,5 W/mK). Velikost tohoto rozdílu závisí na intenzitě slunečního záření, úhlu dopadu, atmosférické propustnosti a délce expozice.
Výzkum Virginia Transportation Research Council (VTRC Report 20-R22) a směrnice FHWA stanovují, že optimální okno pro průzkum je 5–9 hodin po východu slunce pro denní průzkumy (přibližně 10:00–15:00 místního času v mírných zeměpisných šířkách během pozdního jara až časného podzimu). Během tohoto okna přesahuje sluneční záření 600 W/m² na povrchu za jasné oblohy a tepelný kontrast mezi delaminovaným a zdravým betonem dosahuje svého maxima – typicky 1,0–3,0 °C u nepotažených betonových desek. Vrcholný tepelný kontrast obvykle zaostává za slunečním polednem o 1–3 hodiny kvůli tepelné setrvačnosti betonové hmoty. Noční průzkumy (3–5 hodin po západu slunce) poskytují inverzní tepelný kontrast – delaminovaná oblast je teplejší než okolní beton, protože vzduchová mezera brání rozptylu uloženého tepla – a zabraňují artefaktům stínů způsobeným prvky mostní nástavby, sousedními budovami nebo vegetací během denních průzkumů.
Faktor
Příznivá podmínka
Nepříznivá podmínka
Denní doba
10:00–15:00 (den); 20:00–00:00 (noc)
Přechodová období svítání, soumraku
Oblačnost
Jasná obloha (0–10% oblačnost)
Zataženo (>90% oblačnost), rozptýlené oblačno
Sluneční ozáření
>600 W/m²
<250 W/m²
Stav povrchu
Suchý, čistý
Mokrý, zasněžený, pokrytý nečistotami
Rychlost větru
<24 km/h (15 mph)
>32 km/h (20 mph)
Roční období
Pozdní jaro až časný podzim
Zima (říjen–únor na severní polokouli)
Wisconsinské ministerstvo dopravy (WisDOT) a AECOM (studie 2024) doporučují provádět denní termální průzkumy striktně mezi 11:00 a 14:00 místního času za jasných slunečných dnů mezi květnem a říjnem v severních klimatických podmínkách USA. U mostních desek s asfaltovými překryvy je vyžadována delší sluneční expozice, protože překryv zeslabuje tepelný signál – doporučené okno se rozšiřuje na 6–10 hodin po východu slunce. Indianaské ministerstvo dopravy (Indiana DOT) stanovilo, že sluneční záření musí přesáhnout celkovou kumulativní expozici 500 W-h/m² pro spolehlivou detekci delaminací na překrytých deskách. Oblačnost, i dočasná rozptýlená oblačnost, dramaticky snižuje tepelný kontrast, protože nahrazuje přímé sluneční záření (poskytující ~900 W/m² v poledne) difuzním zářením oblohy (typicky 100–300 W/m²).
Výška letu a pokrytí území
Výška letu určuje jak prostorové rozlišení (velikost pixelu na zemském povrchu), tak plošné pokrytí na snímek. Vztah vyplývá ze základní geometrie optiky: daná výška A a horizontální zorné pole (FOV) kamery vytvářejí šířku záběru na zemi W = 2 × A × tan(FOV/2). Pro DJI Zenmuse H20T s horizontálním FOV 24° je ve výšce 30 m šířka záběru 2 × 30 × tan(12°) ≈ 12,8 m. Ve výšce 60 m se šířka záběru zdvojnásobí na přibližně 25,5 m. Nižší výšky poskytují lepší citlivost detekce vad, ale vyžadují více letových linií k pokrytí stejné plochy, což zvyšuje celkovou dobu letu a počet potřebných baterií.
Rychlost dronového průzkumu musí být koordinována s výškou a snímkovací frekvencí kamery, aby bylo zajištěno dostatečné překrytí snímků. Pro generování termální mozaiky se doporučuje 70–80% podélný překryv (ve směru letu) a 60–70% příčný překryv (napříč směrem letu) – stejné fotogrammetrické osvědčené postupy používané pro generování RGB ortomozaiček. Při typické rychlosti průzkumu 5 m/s (18 km/h) a intervalu snímání 2 sekundy je posun vpřed mezi po sobě jdoucími snímky 10 m. Pro GSD 3 cm/pixel a stopu snímku 640 pixelů × 2,7 cm = 17,3 m je podélný překryv 17,3 m − 10 m = 7,3 m, neboli 42 % – pod doporučeným prahem. Pro dosažení 70% podélného překryvu při rychlosti 5 m/s musí být interval snímání snížen přibližně na (17,3 × 0,30) / 5 = 1,04 sekundy, což vyžaduje kameru schopnou trvalé snímkovací frekvence 1 Hz bez přehřívání nebo přetečení vyrovnávací paměti.
Požadavky na překryv pro termální mozaiky
Vysoké požadavky na překryv pro generování termální mozaiky představují specifickou výzvu pro dronovou IRT. Termální kamery mají typicky nižší snímkovací frekvence (8–30 Hz) a pomalejší rychlost zápisu dat než RGB kamery, což vytváří úzké hrdlo při dosahování 70–80% podélného překryvu potřebného pro kvalitní spojování mozaiky. Praktická řešení zahrnují:
Snížená rychlost průzkumu: Snížení rychlosti dronu na 3–4 m/s (10–14 km/h) umožňuje termální kameře zachytit snímky s dostatečným překryvem. To prodlužuje dobu letu na plochu průzkumu, ale zlepšuje kvalitu mozaiky.
Více-mřížkové letové vzory: Létání překrývajících se paralelních mřížek (např. střídavé severojižní a východozápadní průlety) poskytuje redundantní pokrytí, které zlepšuje fotogrammetrické řešení, i když jednotlivé průlety mají nižší podélný překryv. Příčný překryv mezi kolmými průlety je efektivně 100 %.
Adaptivní snímkovací frekvence: Moderní software pro plánování letů, jako je DJI Pilot 2, UgCS nebo Pix4Dcapture, dokáže vypočítat intervaly snímání s ohledem na terén, které automaticky upravují snímkovací frekvenci na základě rychlosti a výšky dronu pro udržení cílového překryvu.
Výzkumná komunita inspekce mostů stanovila, že termální ortomozaička s GSD 3–5 cm/pixel a polohovou přesností 5–10 cm (relativně k RTK pozemní pravdě) je dostatečná pro identifikaci delaminovaných oblastí o průměru až 200 mm – což odpovídá minimální velikosti reportovatelné vady ve většině státních mostních inspekčních manuálů.
Tepelné rozlišení a velikost pixelu na povrchu
Rozteč pixelů a její vliv na měření teploty
Velikost pixelu na zemském povrchu (GSD) v termálním zobrazování definuje fyzickou plochu na cílovém povrchu, která odpovídá jednomu pixelu v poli termálního snímku. Vzorec je:
GSD = (Rozteč pixelů × Výška) / Ohnisková vzdálenost
Kde rozteč pixelů je vzdálenost středů detektorových prvků mikrobolometru na senzorovém poli, výška je vzdálenost od kamery k cílovému povrchu (nad úrovní terénu pro snímání nadir) a ohnisková vzdálenost je efektivní ohnisková vzdálenost čočkového systému. Pro DJI Zenmuse H20T (rozteč pixelů 12 µm, ohnisková vzdálenost 13,5 mm) ve výšce 30 m nad povrchem desky:
GSD = (0,012 mm × 30 000 mm) / 13,5 mm = 26,7 mm ≈ 2,7 cm/pixel
Každý termální snímek 640×512 pixelů ve výšce 30 m pokrývá plochu přibližně 17,3 m × 13,8 m, přičemž každý pixel integruje teplotu plochy povrchu 2,7 cm × 2,7 cm. Uváděná teplota pro každý pixel je plošně vážená průměrná teplota všeho v rámci této pozemní stopy – včetně betonu, otevřených trhlin, povrchových nečistot a případného částečného stínu nebo vlhkosti. Tento průměrovací efekt znamená, že malé vady (menší než 2–3 jednotky GSD) produkují hodnoty teploty, které jsou částečně zředěny okolním zdravým materiálem, čímž se snižuje zdánlivý tepelný kontrast.
Model kamery
Ohnisková vzdálenost
Výška (m)
GSD (cm/px)
Šířka záběru (m)
Zenmuse H20T
13,5 mm
30
2,7
17,3
Zenmuse H20T
13,5 mm
50
4,4
28,8
Zenmuse H20T
13,5 mm
75
6,7
43,1
FLIR Vue Pro R (13 mm)
13 mm
30
2,8
17,7
FLIR Vue Pro R (19 mm)
19 mm
50
3,2
20,3
Workswell WIRIS Pro
25 mm
50
2,4
15,4
Pro detekci delaminací mostních desek je GSD 3–5 cm/pixel široce doporučeným provozním rozsahem. Při GSD jemnějším než 2 cm se průzkum stává neefektivním, protože úzká šířka záběru vyžaduje mnoho paralelních letových linií a úroveň šumu termálního obrazu může omezit schopnost rozlišit sousední pixely s velmi malými teplotními rozdíly. Při GSD hrubším než 8 cm mohou malé delaminace (průměr 200–300 mm) zabírat pouze 3–6 pixelů – příliš málo pro spolehlivou detekci vizuální analýzou nebo algoritmy AI. Studie dronové IRT na University of Nebraska-Lincoln zjistily, že pravděpodobnost detekce vad menších než 3× GSD klesá pod 60 %, zatímco vady pokrývající 10+ pixelů dosahují míry detekce nad 90 %.
NETD a minimální detekovatelný teplotní rozdíl
Ekvivalentní teplotní rozdíl šumu (NETD) – vyjádřený v milikelvinech (mK) – představuje nejmenší teplotní rozdíl, který kamera dokáže rozlišit od úrovně tepelného šumu. Moderní LWIR mikrobolometrové kamery používané v dronové IRT dosahují hodnot NETD 20–50 mK (0,02–0,05 °C). To znamená, že kamera dokáže spolehlivě detekovat teplotní rozdíly 0,05 °C nebo větší mezi sousedními pixely za předpokladu dostatečného signálu. Praktický minimální detekovatelný ΔT pro tepelnou anomálii související s vadou je však vyšší než NETD, protože:
Pozorovaný ΔT mezi vadnými a zdravými oblastmi musí překračovat NETD kamery faktorem alespoň 3–5× pro spolehlivou detekci (poměr signál/šum >3).
Atmosférický útlum mezi kamerou a cílem (i ve výškách dronu 30–60 m) snižuje zdánlivý tepelný kontrast o 2–5 % v závislosti na vlhkosti a teplotě.
Variace emisivity povrchu (beton 0,85–0,95, asfalt 0,90–0,97, voda 0,96, olejem znečištěný beton 0,92) zavádějí zdánlivé chyby teploty 0,2–0,5 °C, i když je skutečná povrchová teplota jednotná.
Prostorové průměrování napříč stopou GSD ředí tepelný signál z malých vad.
Praktický minimální detekovatelný ΔT pro dronovou IRT inspekci mostních desek je přibližně 0,5 °C za dobrých podmínek (jasná obloha, slabý vítr, >600 W/m² slunečního ozáření, suchý povrch). Za okrajových podmínek (řídká oblačnost, mírný vítr, brzy ráno nebo pozdě odpoledne) stoupá minimální detekovatelný ΔT na 1,0–1,5 °C. Směrnice FHWA uvádějí, že hodnoty ΔT pod 0,5 °C by měly být považovány za neprůkazné a vyžadují ověření jinými metodami. Typické hodnoty ΔT související s delaminací se pohybují od 0,5 °C (okrajová, hluboká vada pod překryvem) do 3 °C+ (silný signál, mělká vada v nezakryté desce v solárním poledne).
Zpracování dat a generování termální mozaiky
Radiometrická kalibrace a normalizace
Surová termální obrazová data z kamer namontovaných na dronech se skládají z 14bitových nebo 16bitových digitálních hodnot představujících infračervený tok dopadající na každý detektorový pixel. Převod těchto surových hodnot na fyzikální teplotu vyžaduje radiometrickou kalibraci pomocí továrních kalibračních dat kamery – polynomiální přenosové funkce mapující digitální hodnoty na zář scény, kombinované s korekcemi pro vnitřní teplotu kamery, integrační čas a optickou propustnost. Kalibrační funkce je typicky:
T = f(DN, T_pouzdro, T_objektiv, R_vlhkost, R_vzdálenost)
Kde DN je surová digitální hodnota výstupu, T_pouzdro a T_objektiv jsou vnitřní teploty kamery (měřené palubními senzory), R_vlhkost je relativní vlhkost ovlivňující atmosférickou transmisi a R_vzdálenost je vzdálenost od kamery k cíli. Moderní radiometrické termokamery (DJI H20T, FLIR Vue Pro R) provádějí tyto korekce palubně pro každý pixel a každý snímek, přičemž vydávají teplotně kalibrovaná data v radiometrických JPEG formátech (R-JPEG nebo TIFF s vloženými teplotními poli).
Po kalibraci jednotlivých snímků vyžaduje termální mozaika normalizaci teploty, protože se tepelné prostředí během průzkumného letu mění. Solární zatížení se mění s úhlem slunce, jak se dron pohybuje po oblasti průzkumu (zejména u velkých mostních desek nebo úseků vozovek vyžadujících 20–30minutové lety). Změna úhlu elevace slunce o 15° během průzkumného letu může změnit absolutní povrchovou teplotu o 2–4 °C, což vytváří viditelný gradient napříč termální mozaikou, který nesouvisí s podpovrchovými vadami. Normalizační algoritmy prokládají polynomický povrch nízkého řádu (typicky druhého) rozložením teploty pozadí, poté tento povrch odečítají k izolaci lokálních tepelných anomálií. Alternativní přístupy zahrnují přiřazení histogramu mezi překrývajícími se pásy snímků nebo normalizaci pomocí referenční desky s použitím kalibrovaných referencí černého tělesa zahrnutých do zorného pole průzkumu.
Generování termální ortomozaičky
Produkce georeferencované termální ortomozaičky následuje pracovní postup fotogrammetrie Structure-from-Motion (SfM), přizpůsobený nižšímu kontrastu a vyššímu šumu termálních snímků. Sekvence zpracování zahrnuje:
Extrakci příznaků: Charakteristické termální prvky – okraje stínových vzorů, značení vozovek (která mají odlišnou tepelnou emisivitu), dilatační spáry, pruhové značení a konstrukční spáry – jsou detekovány napříč překrývajícími se termálními snímky pomocí algoritmů, jako je SIFT (Scale-Invariant Feature Transform) nebo AKAZE (Accelerated KAZE). Termální snímky mají méně a méně výrazných příznaků než RGB snímky, takže vyšší překryv (70–80 %) je nezbytný k zajištění dostatečných korespondencí příznaků.
Vyrovnání svazku: Relativní pozice a orientace kamer jsou řešeny pomocí odpovídajících příznakových bodů napříč sadou snímků, omezené RTK GPS pozicemi kamer. Vyrovnání svazku produkuje řídké 3D mračno bodů spojovacích bodů a zpřesňuje kalibraci kamery (ohnisková vzdálenost, hlavní bod, parametry zkreslení objektivu).
Husté přiřazování a generování sítě: Husté mračno bodů je generováno pro zemský povrch a je vypočtena triangulovaná síť nebo digitální model povrchu (DEM). Pro průzkumy mostních desek je povrch přibližně rovinný, takže 2,5D DEM je typicky dostačující.
Ortorektifikace a ortofoto: Každý termální snímek je ortorektifikován pomocí DEM a parametrů kamery, poté prolnut do souvislé mozaiky pomocí optimalizace spojovacích linií a vyvážení barev/teploty (úprava mezisnímkových rozdílů jasu a teploty). Výstupem je georeferencovaná termální ortomozaička ve formátu GeoTIFF s vloženými hodnotami teploty.
Výsledná termální ortomozaička typicky dosahuje 2–5 cm GSD a 5–10 cm absolutní polohové přesnosti relativně k RTK pozemní pravdě. Velikosti souborů pro mostní desku 500 m × 20 m při GSD 3 cm se pohybují v rozmezí 500–1500 MB pro jednopásmová 32bitová float teplotní data, což vyžaduje značný výpočetní hardware a optimalizované dělení na dlaždice pro webové doručení.
Detekce tepelných anomálií pomocí AI
Umělá inteligence a hluboké učení transformovaly detekci tepelných anomálií ze subjektivní, na zkušenostech závislé expertní analýzy na automatizovaný, kvantitativní a reprodukovatelný proces. Základní přístup považuje detekci tepelných anomálií za úlohu segmentace obrazu – přiřazení každému pixelu v termální ortomozaičce pravděpodobnosti, že patří do třídy „vada" vs. třídy „zdravý materiál".
Architektura U-Net byla nejvíce validovaným modelem hlubokého učení pro segmentaci termálních snímků v aplikacích občanské infrastruktury. Struktura kodéru-dekodéru U-Net s přeskočenými spojeními zachovává jak sémantické příznaky na vysoké úrovni (typ vady, tvar), tak jemnozrnné prostorové detaily (hranice vad, okraje). Výzkumné studie uvádějí přesnost segmentace U-Net 84,7 % (Diceův koeficient) pro detekci delaminací mostních desek z vozidlových termálních dat, s precizností 82 % a úplností 87 %. U-Net byl trénován na 15 000+ označených termálních obrazových výřezech (128×128 pixelů) extrahovaných z denních a nočních průzkumů na 12 mostních deskách na Floridě a ve Virginii.
Modely založené na Transformeru – konkrétně framework pro detekci objektů s otevřenou množinou Grounding DINO – dosáhly 70% střední průměrné přesnosti (mAP@[0.5:0.95]) na termálních datech mostních desek z AI-integrovaného IRT frameworku University of Central Florida (NDT-CE 2025). Model dosáhl detekčního poměru 78 % vůči zpracovaným IR referenčním datům s průměrným průnikem přes sjednocení (IoU) 0,89, což indikuje těsné zarovnání mezi předpovězenými hranicemi vad a pozemní pravdou. Model byl trénován na 23 000+ surových termálních snímcích (bez předzpracování) s expertně označenými anotacemi vad mapovanými na fyzické pozice na povrchu desky.
Klasické strojové učení přístupy zůstávají relevantní pro scénáře s omezenými trénovacími daty. Techniky extrakce příznaků počítají parametry tepelné textury v rámci klouzavých oken – střední teplota, směrodatná odchylka, šikmost (asymetrie rozložení teploty), špičatost (ostrost vrcholu), entropie (náhodnost teploty) a kontrast (rozsah lokální teplotní variace) – a vkládají tyto příznakové vektory do klasifikátorů, jako je Random Forest (uváděná 79% přesnost) nebo Support Vector Machines (SVM, uváděná 76% přesnost). Metody úrovňových množin založené na vývoji aktivních kontur dosáhly správné míry pozitivní identifikace (CPR) 80,2 % s mírou falešně pozitivních (FPR) 11,5 %.
Automatická redukce falešně pozitivních jevů
Falešně pozitivní jevy v datech dronové IRT vznikají z povrchových prvků, které produkují tepelné anomálie nerozeznatelné od skutečných vad v jediném termálním snímku. Mezi běžné zdroje falešně pozitivních patří: olejové skvrny (nízká emisivita → jeví se jako horké), vlhké skvrny (odpařovací ochlazování → jeví se jako studené), změny textury povrchu (rýhování, smetákový povrch → drobné teplotní variace), nečistoty (listí, štěrk → proměnlivá tepelná signatura), malované značení (odlišná emisivita → zdánlivý teplotní posun) a stíny z mostního zábradlí nebo prvků nástavby (chladné zóny). AI modely snižují falešně pozitivní jevy pomocí multispektrální fúze – současné analýzy registrovaného RGB snímku k označení povrchových prvků a jejich vyloučení z klasifikace vad. Model UCF Grounding DINO integruje RGB kontext jako další vstupní kanál, čímž snižuje míru falešně pozitivních o 35 % ve srovnání s detekcí pouze na základě termálních dat. Vícedobá analýza (porovnání denních a nočních termálních průzkumů stejné oblasti) dále snižuje falešně pozitivní jevy, protože skutečné vady vykazují konzistentní tepelné signatury, zatímco environmentální artefakty se mění.
Detekce delaminací mostních desek z dronu
Fyzikální principy detekce delaminací
Delaminace v betonových mostních deskách je horizontální oddělení v desce, typicky vznikající v rovině nebo v blízkosti roviny horní výztuže – přibližně 50–100 mm pod povrchem desky v typické betonové mostní desce tloušťky 200–250 mm. Korozí horní vrstvy ocelové výztuže vznikají expanzivní korozní produkty (oxidy a hydroxidy železa – rez), které vytvářejí tahová napětí překračující pevnost betonu v tahu (typicky 3–5 MPa pro normální beton). Výsledná horizontální trhlina se šíří podél roviny výztuže a vytváří vzduchem vyplněnou mezeru, která má typicky tloušťku 0,1 mm až 5 mm. Tato vzduchová mezera působí jako tepelný izolant – tepelná vodivost vzduchu (0,026 W/m·K) je přibližně 50–80krát nižší než u betonu (1,7–2,5 W/m·K). I vzduchová mezera o tloušťce 0,5 mm poskytuje tepelný odpor odpovídající přibližně 25–40 mm pevného betonu.
Během slunečního ohřevu mostní desky teče teplo do betonového povrchu a vede se směrem dolů. Tam, kde existuje delaminace, teplo narazí na izolační bariéru, která brání dalšímu vedení směrem dolů. Beton nad delaminací nadále absorbuje sluneční energii, ale nemůže ji rozptýlit do desky pod sebou, což způsobuje zvýšení jeho teploty nad teplotu okolního zdravého betonu. Teplotní rozdíl (ΔT) na povrchu nad delaminací se řídí rovnicí nestacionárního vedení tepla:
∂T/∂t = α (∂²T/∂x² + ∂²T/∂y² + ∂²T/∂z²)
Kde T je teplota, t je čas, α je teplotní difuzivita (α = k/ρcp, přibližně 0,7 × 10⁻⁶ m²/s pro beton, 0,07 × 10⁻⁶ m²/s pro asfalt). Řešení této rovnice s okrajovou podmínkou delaminace ukazuje, že povrchový ΔT závisí nepřímo na hloubce vady – vada v hloubce 25 mm produkuje přibližně 4× větší povrchový ΔT než vada v hloubce 100 mm při identickém solárním zatížení.
Hloubková omezení a vlivy překryvů
Maximální hloubka, ve které lze delaminaci spolehlivě detekovat pasivní dronovou IRT, je přibližně 100–150 mm od povrchu za optimálních podmínek solárního zatížení (>600 W/m², jasná obloha, suchý povrch, slabý vítr). Za touto hloubkou je tepelná difuzní vlna z povrchu utlumena do takové míry, že porucha způsobená delaminací produkuje povrchový ΔT pod prahem detekce 0,5 °C. To znamená, že pro standardní betonovou mostní desku tloušťky 200–250 mm nejsou delaminace v plné hloubce desky (u spodní výztuže) obecně detekovatelné z povrchu pasivní termografií.
U mostních desek s asfaltovými překryvy se výzva detekce výrazně zvyšuje. Asfaltový překryv tloušťky 50 mm (2 palce) snižuje povrchový ΔT z betonové delaminace přibližně o 50–60 % ve srovnání s nezakrytou deskou. K tomuto útlumu dochází, protože překryv přidává tepelnou hmotu (absorbuje teplo), šíří tepelnou anomálii laterálně (tepelná difuze v překryvu) a zavádí další rozhraní (spojení překryv-deska), které může mít vlastní tepelnou signaturu. ASTM D4788 specifikuje, že metodu lze použít na překryvy do tloušťky 100 mm (4 palce), ale Virginia Transportation Research Council zjistila, že spolehlivost detekce významně klesá u překryvů nad 75 mm. U překryvů přesahujících 100 mm by měla být IRT považována pouze za screeningový nástroj vyžadující rozsáhlé ověření řetězovým tahem, impact-echo nebo jádrovými vývrty.
Letová strategie dronu pro průzkumy mostních desek
Typický dronový IRT průzkum mostní desky se řídí tímto provozním protokolem:
Předletové posouzení: Ověření povětrnostních podmínek (vítr <24 km/h, oblačnost <10 %, žádné srážky očekávané v ±2 hodinách od plánovaného okna průzkumu). Potvrzení suchého stavu povrchu (žádná stojatá voda z deště nebo zavlažovacích systémů). Měření slunečního ozáření pomocí pyranometru na místě – nebo křížová reference s daty místní meteorologické stanice – k potvrzení >600 W/m².
Plánování letové mise: Mostní deska je zmapována v softwaru pro plánování letů (Pix4Dcapture, UgCS, DJI Pilot 2). Nastavení letových parametrů: výška 30–50 m AGL, rychlost 3–5 m/s, 80% podélný překryv, 70% příčný překryv, interval spouště kamery 1–2 sekundy. Dráha letu je navržena jako paralelní průlety zarovnané s podélnou osou mostu, začínající 10 m před mostním nájezdem a končící 10 m za protější opěrou, aby bylo zajištěno úplné pokrytí. Další průlety pod šikmými úhly mohou být naprogramovány pro inspekci spodních ploch desek.
Termální kalibrace: Referenční teplotní cíl (kalibrované černé těleso při okolní teplotě) je umístěn na desku v oblasti průzkumu pro radiometrickou validaci v terénu. Některé protokoly doporučují umístit několik referenčních panelů se známou teplotou na různá místa na desce k zachycení prostorových teplotních gradientů.
Provedení průzkumu: Dron vykonává autonomní letovou misi, zatímco operátor monitoruje telemetrii (úroveň baterie, síla signálu, stav kamery, přesnost GPS). Termální video v reálném čase je přenášeno do tabletu operátora, což umožňuje okamžitou identifikaci významných tepelných anomálií pro předběžné terénní poznámky.
Poletová validace: Ihned po přistání je pomocí přenosného radiometrického teploměru nebo termokamery ověřena povrchová teplota na několika místech pozemní pravdy (zřejmé delaminace, zdravý beton, známé dilatační spáry), aby se potvrdilo, že letecká termální data souhlasí s povrchovými měřeními.
Studie srovnávající detekci delaminací dronovou IRT s pozemní pravdou řetězového tahu (na betonových deskách, kde je řetězový tah účinný) uvádějí pravděpodobnost detekce 75–90 % pro vady >300 mm v průměru v hloubkách <75 mm, klesající na 40–60 % pro vady <200 mm nebo hloubku >100 mm. Míra falešně pozitivních se pohybuje od 10–25 % v závislosti na stavu povrchu a环境álních faktorech.
Detekce odtrhů vozovek a vlhkosti
Odtrh asfaltových vozovek
Odtrh v asfaltových vozovkách – ztráta soudržnosti mezi vrstvami vozovky (typicky mezi asfaltovou obrusnou vrstvou a podkladním asfaltem nebo betonovým podkladem) – vytváří horizontální rovinu oddělení, kterou lze detekovat dronovou IRT pomocí stejného mechanismu tepelné izolace jako u betonové delaminace. Když dojde k odtrhu překryvu: vzduchová mezera brání vedení tepla směrem dolů během solárního ohřevu, což produkuje povrchové horké místo; během nočního ochlazování mezera brání stoupání uloženého tepla, což produkuje teplou anomálii. Asfaltový odtrh však vykazuje jedinečné tepelné signatury ve srovnání s betonovou delaminací kvůli vyšší sluneční absorpční schopnosti asfaltu (0,90–0,95 pro stárnutý asfalt oproti 0,60–0,75 pro beton), nižší tepelné vodivosti (0,7–1,0 W/m·K oproti 1,7–2,5 W/m·K) a nižší tepelné hmotě.
University of Nebraska-Lincoln a Nebraské ministerstvo dopravy provedly komplexní studie (Report M082, ROSAP DOT 61030) hodnotící dronem montovanou IRT pro detekci podpovrchových dutin a mezivrstvového odtrhu v silničních vozovkách. Výsledky prokázaly spolehlivou detekci odtrhu v hloubkách až 75–100 mm za optimálních tepelných podmínek (jasné letní odpoledne, sluneční ozáření >700 W/m², suchý povrch vozovky). Studie zjistila, že oddělené asfaltové překryvné vrstvy vykazovaly zvýšení povrchové teploty o 1,5–4,0 °C relativně k přilehlým zdravým úsekům – výrazně vyšší než ΔT z betonové delaminace kvůli vyšší solární absorpci asfaltu.
Detekce vlhkosti ve vozovkách
Akumulace vlhkosti ve vozovkách – voda zachycená uvnitř konstrukce vozovky, na rozhraní vrstev nebo pod vrstvou vozovky – produkuje tepelnou signaturu odlišnou od vzduchem vyplněných dutin nebo delaminací. Voda má tepelnou vodivost 0,6 W/m·K (přibližně 23× vyšší než vzduch, ale 3–4× nižší než beton) a objemovou tepelnou kapacitu 4,18 MJ/m³·K (přibližně 2× vyšší než beton a 3 000× vyšší než vzduch). Tyto vlastnosti znamenají, že:
Během solárního ohřevu: Vlhkem vyplněná dutina vede teplo efektivněji než vzduchem vyplněná dutina, takže povrch nad vlhkou oblastí se zahřívá pomaleji než nad suchou delaminací – povrch se může jevit chladnější než okolní vozovka během fáze ohřevu (negativní tepelný kontrast). Voda absorbuje tepelnou energii bez proporcionálního zvýšení teploty kvůli své vysoké měrné tepelné kapacitě (4 180 J/kg·K).
Během nočního ochlazování: Voda zadržuje uložené teplo a uvolňuje ho pomaleji než okolní suché materiály, což způsobuje, že se vlhká oblast jeví teplejší během fáze ochlazování (pozitivní noční kontrast). Tato noční signatura je často spolehlivější pro detekci vlhkosti než denní průzkumy.
Odpařovací ochlazování: Pokud je vlhkost blízko povrchu a voda se může odpařovat, může odpařovací ochlazování produkovat studené místo o 2–5 °C pod okolní teplotou bez ohledu na denní cyklus ohřevu – nejprůkaznější tepelná signatura blízko-povrchové vlhkosti.
Detekce vlhkosti dronovou IRT je nejúčinnější, když je kombinována s GPR daty, která potvrzují přítomnost a hloubku vody. Studie Nebraského DOT zjistila, že kombinované IRT + GPR dronové průzkumy dosáhly 88% přesnosti pro detekci vlhkosti v podkladních vrstvách vozovek v hloubkách až 150 mm, ve srovnání s 62% přesností pro samotnou IRT.
Odtrhování v asfaltových směsích
Odtrhování – ztráta soudržnosti mezi asfaltovým pojivem a kamenivem v asfaltové směsi v důsledku poškození vlhkostí – vytváří mikroskopické odtrhy, které nemusí jednotlivě produkovat detekovatelné tepelné anomálie. Když však odtrhování postihne podstatný objem směsi (typicky >25 % plochy vozovky v dané hloubce), vykazuje postižená vozovka změněné tepelné vlastnosti – nižší tepelnou vodivost (kvůli vzduchovým dutinám vytvořeným oddělením pojiva a kameniva) a vyšší zadržování vlhkosti. Dronová IRT dokáže detekovat tyto tepelně změněné zóny jako oblasti se zpožděnou tepelnou odezvou – zahřívají se rychleji během dne (kvůli vzduchovým dutinám), ale mohou vykazovat méně výrazný denní ohřev, pokud je přítomna také vlhkost. Detekce odtrhování vyžaduje pečlivou vícedobou analýzu porovnávající rychlosti ohřevu a ochlazování podezřelých oblastí se známou zdravou vozovkou, protože tepelná signatura je jemná (ΔT typicky 0,5–1,0 °C) a snadno maskovaná variacemi emisivity povrchu.
Integrace s vizuální RGB inspekcí
Koregistrovaná termální a vizuální data
Moderní náklady dronové IRT zachycují koregistrované termální a RGB snímky – což znamená, že každý termální snímek má odpovídající RGB snímek (viditelného spektra) pořízený ze stejné pozice kamery a směru, se známou geometrickou transformací mezi oběma senzory. DJI Zenmuse H20T toho dosahuje montáží termálního senzoru, širokoúhlého RGB senzoru a tele RGB senzoru na společnou optickou lavici v gimbalovém pouzdře, kalibrovanou v továrně tak, že pixely každého senzoru mapují na známé pozemní souřadnice. Tato koregistrace umožňuje:
Zobrazení s rozdělenou obrazovkou: Operátor nebo analytik může zobrazit termální snímek a odpovídající RGB snímek vedle sebe, přičemž využívá viditelný kontext k interpretaci tepelných anomálií – je to horké místo delaminace nebo olejová skvrna? RGB snímek odhaluje povrchové prvky neviditelné v termálním snímku.
Fúzi obrazu: Termální data (v pseudobarvách) jsou průhledně překryta na RGB snímku pomocí alfa prolnutí, čímž vzniká jediný kombinovaný snímek, kde je vizuální kontext viditelný pod překryvem tepelné anomálie. Tento produkt je výrazně srozumitelnější pro mostní inženýry a čtenáře inspekčních zpráv než surové termogramy.
Multispektrální analýzu: Model AI detekce přijímá jako vstup jak termální, tak RGB kanály, přičemž se učí spojovat vzorce tepelných anomálií s viditelnými povrchovými prvky. Tento multispektrální vstup snižuje míru falešně pozitivních tím, že modelu umožňuje rozpoznat, že kruhové horké místo s tmavým zbarvením v RGB kanálu je pravděpodobně olejová skvrna, zatímco horké místo bez viditelného povrchového prvku je pravděpodobně podpovrchová delaminace.
Srovnávací mapování vad
Integrace dat dronové IRT s vizuálními inspekčními RGB daty umožňuje srovnávací mapování vad – překrytí polygonů tepelných anomálií na mapu vizuálních inspekčních vad k identifikaci vztahů mezi povrchově viditelnými vadami (trhliny, vydrolení, záplaty) a podpovrchovými vadami (delaminace, odtrh). Studie Wisconsin DOT/AECOM 2024 prokázala, že porovnání map tepelných anomálií z dronové IRT se současnými vizuálními RGB mapami trhlin odhalilo, že 68 % tepelných anomálií odpovídalo oblastem s povrchově viditelnými trhlinami, zatímco 32 % představovalo delaminace bez povrchového projevu – nejnebezpečnější typ, protože je nelze detekovat samotnou vizuální inspekcí. Naopak 23 % oblastí s povrchovými trhlinami nevykazovalo žádnou tepelnou anomálii, což indikuje povrchové zhoršení bez podpovrchové delaminace – oblasti, které nemusí vyžadovat konstrukční opravu.
Integrace s TarmacView
Vizuální inspekční platforma TarmacView může přijímat termální ortomozaičky z dronové IRT jako další datové vrstvy v rámci databáze inspekce mostů. Polygony tepelných anomálií – generované AI analýzou termální mozaiky a exportované ve formátu GeoJSON nebo shapefile – jsou importovány jako překryvné vrstvy vad. Každá tepelná anomálie nese atributy: ΔT (teplotní rozdíl v °C), plocha (m²), souřadnice centroidu (zeměpisná šířka, délka v NAD83 nebo WGS84), spolehlivost detekce (z výstupu AI modelu), klasifikace závažnosti (na základě prahů ΔT) a název zdrojového termálního snímku pro dohledatelnost. Rozhraní TarmacView umožňuje inspektorům:
Dotazování na tepelné anomálie: Kliknutím na libovolný polygon tepelné anomálie zobrazit její teplotní rozdíl, výřez surového termálního snímku, odpovídající RGB snímek a všechna vizuální inspekční data (mapy trhlin, oblasti vydrolení, záznamy záplat) v dané lokalitě.
Časové srovnání: Překrytí termálních průzkumů z různých let ke sledování šíření delaminace – delaminace, která narostla z 0,3 m² na 1,2 m² mezi průzkumy v letech 2024 a 2025, jasně indikuje aktivní zhoršování vyžadující zásah.
Více-metodovou korelaci: Porovnání tepelných anomálií z dronové IRT s daty pozemní pravdy z ultrazvukové tomografie, poklepového zkoušení nebo jádrových vývrtů odebraných na označených místech, čímž se buduje kalibrační databáze, která zlepšuje přesnost budoucích detekčních modelů.
Dronová IRT vs. vozidlová IRT
Srovnání rychlosti pokrytí
Vozidlová IRT (dle ASTM D4788) a dronová IRT se zásadně liší v rychlosti průzkumu a plošném pokrytí. Vozidlové systémy jsou navrženy pro vysokorychlostní provoz – snímání termálních snímků při jízdních rychlostech 80–113 km/h (50–70 mph) s šířkou záběru přibližně 4,6 m (15 stop) na jeden průjezd. Standardní dvoupruhová mostní deska (délka 30 m × šířka 12 m = 360 m²) může být pokryta jediným 30sekundovým průjezdem při rychlosti 97 km/h, přičemž dva další průjezdy pro protisměrný pruh a krajnice přidají možná 3 minuty celkového času průzkumu desky. Včetně nastavení, nájezdu/výjezdu a jednoho dodatečného chladícího průjezdu trvá celý průzkum desky 5–10 minut – provedený bez jakéhokoli přerušení dopravy, protože se inspekční vozidlo pohybuje s běžným provozem.
Dronová IRT pokrývá stejnou mostní desku výrazně nižší rychlostí. Při výšce průzkumu 40 m (poskytující ~3,5 cm GSD) je šířka termálního záběru přibližně 16 m. Při 70% příčném překryvu je efektivní šířka pokrytí na letovou linii 4,8 m. Pro stejnou desku šířky 12 m jsou potřeba 3 letové linie. Při rychlosti letu 5 m/s na 35 m na průjezd (včetně rezervy za oběma konci) trvá každý průjezd 7 sekund. Tři průjezdy plus otočky, stabilizace výšky a systémové kontroly činí přibližně 3–5 minut pro sběr dat desky – srovnatelné s rychlostí vozidla pro tuto malou plochu. Dron však musí být rozmístěn, baterie ověřeny, předletové kontroly dokončeny a místo startu zřízeno před průzkumem. Pro rozsáhlé průzkumy vozovek (např. dráha 1 km × 8 m) se srovnání dramaticky mění: vozidlová IRT pokryje 1 km za 30–40 sekund při rychlosti 97 km/h; dronová IRT při rychlosti 5 m/s s efektivním záběrem 4,8 m vyžaduje 11 letových linií po 200 sekundách = 2 200 sekund = 37 minut letového času, vyžadující 2–3 výměny baterií.
Metrika
Dronová IRT
Vozidlová IRT
Rychlost průzkumu
3–8 m/s (10–28 km/h)
22–31 m/s (80–113 km/h)
Šířka záběru
12–20 m (závisí na výšce)
4,6 m (pevná)
Rychlost pokrytí
~475 m²/hod
~18 000 m²/hod
Typický čas průzkumu desky
15–30 min (včetně nastavení)
5–10 min (od nájezdu)
Pokrytelná plocha za směnu
~15 000 m²
~50 000 m²
Narušení dopravy
Žádné
Žádné
Potřeba přístupu k mostu zespodu
Ne
Ne
Výhoda přístupu dronové IRT
Hlavní výhodou dronové IRT oproti vozidlové IRT je přístup k mostním prvkům mimo povrch desky. Drony mohou kontrolovat:
Spodní plochy desek: Spodní strany mostních desek – kritické pro detekci vydrolení a delaminace, které nemusí být ještě viditelné z horního povrchu. Drony létají pod mostem s použitím kamer směřujících nahoru nebo pod šikmým úhlem k zachycení termálních dat ze spodní plochy. Termální výzva: spodní plocha desky nedostává žádné přímé sluneční záření, takže pasivní tepelný kontrast musí pocházet z vedení tepla skrz tloušťku desky – vyžadující denní průzkumy, kdy je horní povrch zahříván a teplotní gradient se šíří deskou. Pro zastíněné spodní plochy může být vyžadována aktivní termografie s doplňkovým osvětlením.
Svislé prvky: Mostní pilíře, ložiskové prahy, opěrné zdi, dříky, křídla a opěrné zdi mohou být kontrolovány dronem letícím podél prvku v odstupové vzdálenosti 5–15 m. Termokamera je namířena horizontálně (nebo mírně skloněna dolů) k zachycení svislého povrchu. Solární zatížení na svislých površích je méně intenzivní než na vodorovných deskách (kosinus úhlu mezi sluncem a normálou povrchu), takže termografie svislých prvků vyžaduje polední průzkumy, kdy je úhel slunce nejvyšší.
Omezené prostory: Dronová IRT může kontrolovat prostory pod mostem, interiéry propustků, tunelové ostění a omezené konstrukční prvky, kam se vozidlové systémy nedostanou a kde by manuální inspekce vyžadovala lešení, inspekční vozidla pod most (snooper vozidla) nebo lanový přístup.
Mosty přes překážky: Drony mohou kontrolovat mosty nad vodou, hlubokými údolími, environmentálně citlivými mokřady, aktivními železnicemi nebo městskými kaňony, kde je vozidlový přístup pro skenování povrchu desky nemožný. Dron operuje z bezpečného místa startu mimo oblast překážky a vykonává celou inspekční misi autonomně.
Srovnání nákladů
Studie University of Nebraska-Lincoln a Nebraského DOT poskytla podrobné srovnání nákladů pro metody identifikace vad souvisejících s kvalitou (QRDI). Dronová IRT dosáhla nákladů přibližně 0,06 USD na čtvereční stopu (0,65 USD/m²) , ve srovnání s 0,15–0,30 USD na čtvereční stopu u vozidlové IRT včetně mobilizace a zpracování dat. Řetězový tah – základní metoda – stojí 0,60–1,00 USD na čtvereční stopu (6,50–10,75 USD/m²), ale vyžaduje uzavírky jízdních pruhů a více inspektorů. Nákladová výhoda dronové IRT se stává významnější pro mosty na odlehlých místech nebo přes překážky, kde by vozidlový přístup vyžadoval rozsáhlou přípravu místa. Vozidlová IRT si však udržuje nákladovou výhodu na plochu pro velké, snadno přístupné mostní desky, kde je proveditelný vysokorychlostní sběr dat. Optimální strategie z hlediska nákladů: vozidlová IRT pro rychlý screening přístupných mostů na úrovni desky, dronová IRT pro mosty s problémy s přístupem, svislé prvky, spodní plochy a cílené sledování anomálií identifikovaných ve vozidlovém průzkumu.
Regulační aspekty
FAA Part 107 pro dronovou termografii
Ve Spojených státech se komerční operace dronové IRT řídí FAA Part 107 (Code of Federal Regulations Title 14, Chapter I, Subchapter F, Part 107) – Small Unmanned Aircraft Systems. Klíčové požadavky relevantní pro termografické operace:
Certifikát dálkového pilota: Operátor dronu musí vlastnit certifikát dálkového pilota vydaný FAA, získaný složením Aeronautical Knowledge Test (počáteční zkouška Part 107) a absolvováním opakovacího testu znalostí každých 24 měsíců. Certifikát vyžaduje minimální věk 16 let a bezpečnostní prověrku TSA.
Registrace letadla: Dron musí být registrován u FAA, pokud váží více než 0,55 lb (250 g). Všechny drony používané pro termografii mostů tento práh překračují. Poplatek za registraci je 5 USD a je platný 3 roky. Registrační číslo musí být na letadle vyznačeno.
Požadavek VLOS: Dron musí být provozován v přímé vizuální viditelnosti (VLOS) dálkového pilota nebo vizuálního pozorovatele – to znamená, že letadlo musí být viditelné bez dalekohledu po celou dobu. Pro průzkumy mostních desek to omezuje souvislý inspekční dosah na přibližně 400–500 m od stanoviště pilota. Velké mostní desky (např. 1 200 m dlouhý Chesapeake Bay Bridge) vyžadují přemístění stanoviště pilota podél desky nebo použití více vizuálních pozorovatelů.
Maximální výška: 400 stop (120 m) AGL, pokud není dron do 400 stop od stavby, v takovém případě může výška přesáhnout 400 stop AGL až o 400 stop nad vrcholem stavby. To je dostačující pro průzkumy mostních desek (typicky 30–60 m AGL), ale může omezit inspekci vrcholků velmi vysokých mostních věží.
Denní operace: Part 107 historicky omezoval operace na denní hodiny (30 minut před oficiálním východem slunce do 30 minut po oficiálním západu slunce). Pravidlo pro noční operace Part 107 z roku 2021 umožňuje noční lety bez výjimky, pokud má dron protikolizní osvětlení viditelné na 3 statutární míle a dálkový pilot absolvoval aktualizovaný opakovací výcvik zahrnující noční operace. To je významné pro termografii, protože noční průzkumy často poskytují lepší tepelný kontrast pro určité typy vad.
Let nad lidmi: Part 107 obecně zakazuje let nad lidmi, kteří se přímo neúčastní operace, pokud dron nesplňuje specifické požadavky na hmotnost a bezpečnost (kategorie 1–4). Pro termografii mostů nad aktivními silnicemi s dopravou pod nimi dron nepřelétá nad vozidly (povrch desky je nad dronem v typických výškách průzkumu), ale operace nad obydlenými oblastmi v blízkosti mostních nájezdů mohou vyžadovat soulad s ustanoveními o letu nad lidmi.
BVLOS a zvláštní oprávnění
Operace mimo vizuální přímou viditelnost (BVLOS) – kde dron letí mimo vizuální dosah dálkového pilota bez pomoci – jsou relevantní pro dronovou IRT inspekci dlouhých úseků vozovek (dálniční úseky, dráhy) nebo velkých mostních desek, kde je kontinuální pokrytí VLOS nepraktické. Výjimky FAA BVLOS (Part 107.31) vyžadují podrobný bezpečnostní případ prokazující stejnou nebo vyšší bezpečnost než operace VLOS. Bezpečnostní případ musí řešit schopnost detekce a vyhýbání se (radar, ADS-B nebo elektro-optické senzory detekující jiná letadla), spolehlivé spojení C2 (se specifikacemi latence a redundance), postupy při ztrátě spojení (bezpečné chování: návrat domů, visení nebo pokračování v misi) a monitorování vzdušného prostoru. K roku 2025 FAA udělila výjimky BVLOS několika provozovatelům dronové inspekce pro inspekci infrastruktury, ale proces výjimek zůstává individuální a může vyžadovat 60–120 dní ke schválení.
Pro operace dronové IRT v blízkosti letišť nebo v řízeném vzdušném prostoru (třídy B, C, D nebo E povrchové oblasti) musí operátoři získat oprávnění vzdušného prostoru prostřednictvím systému LAANC (Low Altitude Authorization and Notification Capability) FAA. LAANC poskytuje oprávnění v téměř reálném čase pro operace Part 107 v řízeném vzdušném prostoru do výšky 400 stop AGL. Většina mostních desek v městských oblastech spadá do řízeného vzdušného prostoru a oprávnění LAANC je obvykle získatelné během minut pro standardní operace během denních hodin. Noční operace v řízeném vzdušném prostoru vyžadují manuální koordinaci s letištní řídící věží.
Mezinárodní regulační rámce
Mezinárodní organizace pro civilní letectví (ICAO) poskytuje zastřešující regulační rámec prostřednictvím ICAO Circular 328 (Unmanned Aircraft Systems, 2011) a ICAO Model UAS Regulations (2020). Circular 328 stanovil základní principy regulace UAS – včetně konceptu, že UAS musí být provozovány s ekvivalentní úrovní bezpečnosti jako pilotovaná letadla. Model UAS Regulations poskytuje rámec pro národní regulátory k přijetí, pokrývající registraci letadel, certifikaci operátorů, provozní omezení a integraci vzdušného prostoru. ICAO Annex 6, Part IV (2022) poskytuje Standardy a doporučené postupy (SARPs) pro mezinárodní operace RPAS.
Evropská agentura pro bezpečnost letectví (EASA) Nařízení 2019/947 klasifikuje operace UAS do tří kategorií na základě rizika: Open (nízké riziko, <25 kg, VLOS, <400 stop, bez nutnosti oprávnění, ale podléhá provozním omezením), Specific (zvýšené riziko, vyžadující provozní oprávnění od národního leteckého úřadu na základě posouzení rizik SORA) a Certified (ekvivalent požadavkům pro pilotovaná letadla, pro operace nad shromážděními osob, přepravu osob nebo nebezpečné zboží). Dronová IRT pro inspekci infrastruktury typicky spadá do kategorie Specific, vyžadující, aby operátor předložil SORA (Specific Operations Risk Assessment) nebo získal prohlášení o předdefinovaném posouzení rizik (PDRA). EASA zveřejnila standardní scénáře (STS-01 a STS-02 pro operace VLOS v kategorii Specific), které zjednodušují proces oprávnění.
Region
Předpis
Klíčové požadavky pro dronovou IRT
Spojené státy
FAA Part 107
Certifikát dálkového pilota, registrace, VLOS, 400 stop AGL, noční operace (s osvětlením)
Evropská unie
EASA 2019/947
Oprávnění kategorie Specific, posouzení rizik SORA, certifikát operátora
Vyžadována registrace (100g+), provozní povolení pro specifický vzdušný prostor
Noční letové operace
Noční dronové IRT průzkumy jsou stále běžnější, protože nabízejí inverzní tepelný kontrast – delaminace se jeví jako teplé anomálie proti chladnějšímu zdravému betonu – a zabraňují artefaktům stínů, oslnění dopravou a tepelným odrazům od sousedních konstrukcí. Předpisy FAA pro noční operace Part 107 (účinné od dubna 2021) vyžadují:
Protikolizní osvětlení: Dron musí mít protikolizní světlo viditelné na 3 statutární míle (4,8 km). Světlo musí být zábleskové nebo blikající a může být buď integrovaná navigační světla dronu, nebo přidaná LED záblesková světla. To je primárně pro zabránění kolize s pilotovanými letadly.
Opakovací výcvik: Dálkový pilot musí absolvovat aktualizovaný opakovací výcvik, který pokrývá noční operace, včetně fyziologických faktorů (noční vidění, prostorová dezorientace), požadavků na osvětlení a provozních aspektů.
Požadavek VLOS: Noční operace stále podléhají VLOS – dron musí být viditelný pro dálkového pilota po celou dobu. To vyžaduje dron s adekvátním osvětlením nebo použití vizuálního pozorovatele s nočním viděním.
Noční termální průzkumy představují další provozní výzvy: snížená situační povědomí (obtížné vidění překážek, jako jsou mostní zábradlí a lanka), žádná vizuální reference pro vnímání hloubky, nižší teploty snižující výkon baterie (kapacita baterie klesá o 10–20 % v chladném počasí) a možná kondenzace na čočce termální kamery. Kvalita termálních dat je však často lepší než u denních dat – tepelný kontrast může dosahovat 1,5–4,0 °C (ve srovnání s 1,0–3,0 °C ve dne) a artefakty odrazu slunce (odlesky od čelních skel vozidel, sluneční oslnění od mokré vozovky) chybí.
Reportování výsledků termální inspekce
Specifikace výstupů
Výsledky dronové IRT inspekce jsou dodávány jako komplexní balík inspekční zprávy obsahující georeferencované termální datové produkty, databáze detekovaných anomálií, klasifikace závažnosti a doporučení. Standardní výstupy zahrnují:
Termální ortomozaička (GeoTIFF): Jednosouborový, georeferencovaný termální obraz celého kontrolovaného povrchu, kde každý pixel ukládá kalibrovanou hodnotu teploty (32bitový float, jednotky °C nebo K). GeoTIFF obsahuje vestavěnou definici CRS (Coordinate Reference System) – typicky NAD83 (2011) pro americké státní rovinné souřadnice nebo WGS84 pro zeměpisnou šířku/délku. Prostorové rozlišení odpovídá velikosti pixelu na povrchu průzkumu (typicky 3–5 cm).
Mapa tepelných anomálií (GeoJSON nebo shapefile): Polygony vymezující každou detekovanou tepelnou anomálii s atributy: ID anomálie, ΔT (°C), plocha (m²), obvod (m), souřadnice centroidu, spolehlivost detekce (0–1 stupnice z AI modelu), klasifikace závažnosti, datum inspekce a reference zdrojových dat.
Klasifikace závažnosti vad se řídí široce používaným systémem FHWA/NACE adaptovaným pro tepelné anomálie:
Úroveň závažnosti
Rozsah ΔT
Požadovaná akce
Příklad plochy
Nízká (monitorovat)
0,5–1,0 °C
Zahrnout do příštího rutinního inspekčního cyklu
Malá, mělká delaminace
Střední
1,0–3,0 °C
Naplánovat opravu do 1–2 let
Typická delaminace, 0,5–1 m²
Vysoká
3,0–10,0 °C
Opravit do 6 měsíců
Velká delaminace, konstrukční problém
Kritická
>10,0 °C
Okamžitá oprava
Aktivní vydrolení, bezpečnostní riziko
RGB ortomozaička (GeoTIFF): Vysoce rozlišovací vizuální obraz kontrolované oblasti, georeferencovaný a zarovnaný s termální mozaikou pro překryvnou vizualizaci.
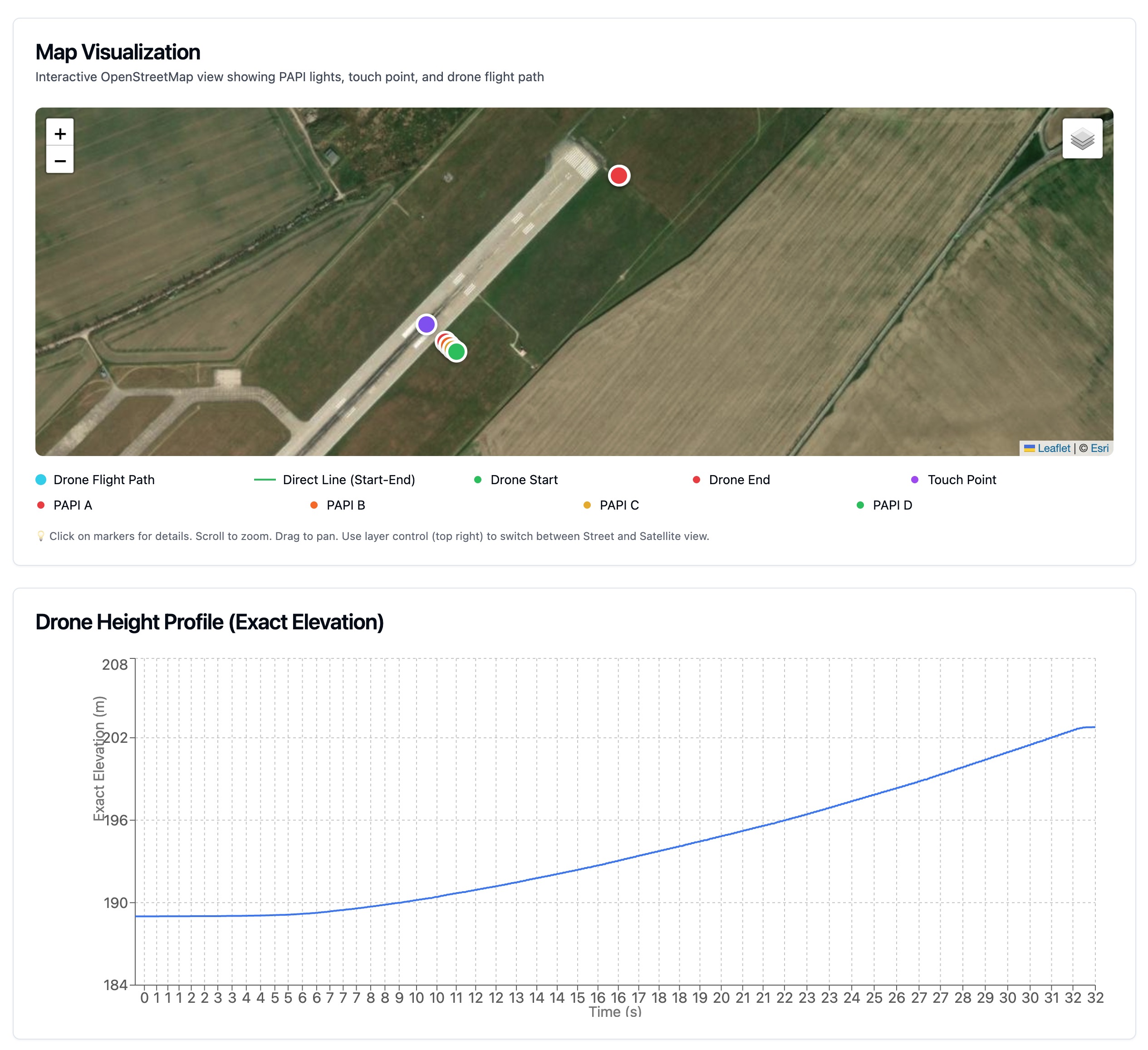
Interaktivní webový prohlížeč: Mnoho poskytovatelů průzkumů dodává výsledky prostřednictvím webových GIS platforem (ArcGIS Online, Cesium, Potree), kde mohou inspektoři přepínat mezi termální a RGB vrstvami, přibližovat jednotlivé anomálie, prohlížet atributová data a měřit vzdálenosti nebo plochy. Interaktivní prohlížeč umožňuje mostním inženýrům dotazovat se na libovolné místo na mostě a získat povrchovou teplotu v době průzkumu.
Standardy dokumentace anomálií
Každá detekovaná tepelná anomálie by měla být zdokumentována s dostatečnými podrobnostmi pro následnou inspekci, plánování oprav a dlouhodobé monitorování stavu. Manuál AASHTO pro inspekci mostních prvků poskytuje rámec pro dokumentaci vad. U tepelných anomálií dokumentace zahrnuje:
Polohu: GPS souřadnice (zeměpisná šířka, délka, nadmořská výška), mostní prvek (deska, spodní plocha, nosník, pilíř) a reference specifické pro konstrukci (linie nosníku, číslo pole, staničení dle mostních plánů).
Geometrii: Délka, šířka, plocha a orientace (relativně k podélné ose mostu). U nepravidelných anomálií je zaznamenán minimální ohraničující obdélník a konvexní polygon obálky.
Teplotní data: Maximální povrchová teplota v rámci anomálie, minimální teplota, ΔT relativně k přilehlému zdravému materiálu (střední teplota 1 m nárazníkové zóny kolem anomálie) a teplotní gradient (ΔT/vzdálenost) na hranici anomálie – ostré gradienty indikují výrazné okraje vad.
Úroveň spolehlivosti: Na základě výstupu AI detekce a revize analytikem: Vysoká (jasná tepelná signatura, potvrzeno RGB kontextem, ΔT > 2 °C), Střední (střední signatura, určitá nejednoznačnost, ΔT 1–2 °C) nebo Nízká (jemná signatura, možný falešně pozitivní, ΔT 0,5–1,0 °C) – vyžadující ověření jinou NDT metodou.
Doporučenou akci: Konkrétní doporučení pro každou anomálii: monitorovat, ověřit UT/klepáním, jádrový vývrt, naplánovat opravu nebo okamžitá oprava.
Zajištění kvality a ověření
Zpráva z dronové IRT inspekce musí obsahovat dokumentaci zajištění kvality prokazující přesnost a spolehlivost dat. Balík QA/QC by měl zahrnovat:
Kalibrační certifikáty: Aktuální (do 12 měsíců) kalibrační certifikáty pro termokameru, dohledatelné k NIST nebo ekvivalentnímu národnímu metrologickému institutu. Kalibrační dokument stanovuje přesnost kamery (typicky ±2 °C nebo ±2 %) a NETD (≤50 mK).
Ověření pozemní pravdou: Teplotní měření shromážděná na 3–5 bodech pozemní pravdy napříč kontrolovanou oblastí pomocí kalibrovaného kontaktního teploměru (termočlánek typu K nebo povrchová sonda) nebo kalibrovaného radiometru. Rozdíl mezi leteckou a pozemní teplotou by měl být zdokumentován; odchylky přesahující 2 °C by měly být prošetřeny.
Ověření GSD: Skutečná GSD je ověřena měřením známých rozměrů v termální ortomozaičce (rozteč dilatačních spár, šířka pruhu, známé konstrukční rozměry) a porovnáním s nominální GSD návrhu průzkumu.
Polohová přesnost: Přesnost RTK GPS je ověřena porovnáním naměřených souřadnic 3–5 pozemních kontrolních bodů (zaměřených totální stanicí nebo RTK roverem) s jejich souřadnicemi naměřenými z termální ortomozaičky. Střední kvadratická chyba (RMSE) by měla být <10 cm horizontálně a <15 cm vertikálně.
Validace detekce: U mostů, kde se provádí destruktivní testování nebo jiné NDT, je generována matice záměn porovnávající IRT-detekované anomálie s ověřenými vadami. Metriky zahrnují míru skutečně pozitivních (úplnost), míru falešně pozitivních, preciznost a F1 skóre. Tyto metriky jsou reportovány pro celkový průzkum a rozděleny podle úrovně závažnosti a hloubky vady.
Integrace se systémy správy mostů (BMS)
Konečným výstupem dronové IRT inspekce nejsou samotná termální data, ale integrace dat o tepelných anomáliích do systému správy mostů (BMS), který řídí plánování údržby, prioritizaci oprav a alokaci rozpočtu. Většina amerických státních DOT používá AASHTOWare Bridge Management nebo BMS platformy založené na Pontis. Data o anomáliích z dronové IRT vstupují do těchto systémů prostřednictvím:
Přiřazení stavového stavu: Každý mostní prvek obdrží stavový stav (stupnice 1–4 dle Manuálu AASHTO pro inspekci mostních prvků) na základě rozsahu a závažnosti detekovaných vad. Například mostní deska s plochou delaminace <2 % (určenou z plochy termální anomálie dronové IRT dělené celkovou plochou desky) by obdržela Stavový stav 1 (Dobrý); 2–10 % delaminace = Stavový stav 2 (Uspokojivý); 10–25 % = Stavový stav 3 (Špatný); >25 % = Stavový stav 4 (Kritický).
Modelování zhoršování: Porovnání po sobě jdoucích dronových IRT průzkumů umožňuje vytvoření křivek zhoršování na úrovni prvků – míra růstu plochy delaminace v čase. Deska vykazující šíření delaminace z 5 % na 12 % za 3 roky indikuje zrychlené zhoršování vyžadující zásah do 1–2 let, aby se zabránilo Stavovému stavu 4.
Prioritizace oprav: Závažnost, rozsah a poloha tepelné anomálie jsou integrovány s dalšími daty inspekce mostu (nosnost, ADT doprava, stav zahloubení, stav prvků kritických pro lom) k vygenerování numerického skóre priority pro každou opravu. Drony umožňují tuto vícezdrojovou integraci dat poskytováním georeferencované, kvantifikované databáze vad, která může být přímo načtena do BMS.
Často kladené otázky
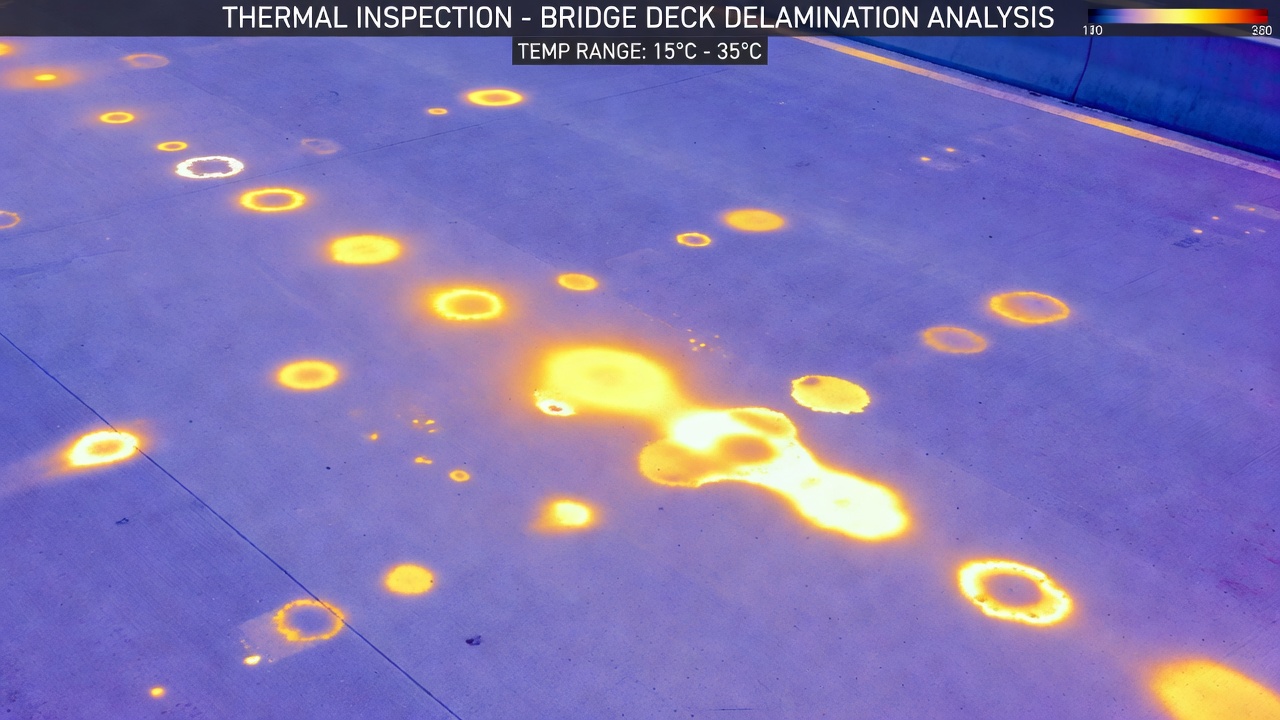
Dronová infračervená termografie (dronová IRT) je NDT metoda, která montuje termovizní kameru na bezpilotní letadlo (UAV) k detekci podpovrchových vad v mostních deskách, vozovkách a betonových konstrukcích. Dron přelétá nad cílovým povrchem, zatímco termokamera zaznamenává povrchové teplotní variace. Podpovrchové vady – delaminace, odtrhy, dutiny a kapsy vlhkosti – mají odlišné tepelné vlastnosti než zdravý materiál. Během solárního ohřevu působí vzduchem vyplněné mezery (delaminace) jako tepelná izolace, což způsobí, že se povrch nad vadou zahřívá rychleji a je o 0,5–3 °C teplejší než okolní zdravý beton. Termokamera zachycuje tyto teplotní rozdíly jako tepelné anomálie viditelné v pseudobarevných termogramech. Dronová IRT umožňuje inspekci mostních desek, ložisek, opěr, úseků vozovek a vyvýšených konstrukcí bez uzavírání dopravy, lešení nebo přístupového vybavení pod most.
Typické náklady dronové IRT používají nechlazené mikrobolometrové LWIR kamery ve spektrálním pásmu 7,5–14 µm. Mezi běžné modely patří DJI Zenmuse H20T (rozlišení 640×512, rozteč pixelů 12 µm, NETD ≤50 mK, f/1,0, přesnost ±2 °C, cca 12 000 USD), FLIR Vue Pro R (640×512, 12 µm, NETD <50 mK, možnosti objektivů 9 mm nebo 13 mm, radiometrická kalibrace, cca 6 000–9 000 USD) a Workswell WIRIS Pro (640×512, NETD 30 mK, 10× optický zoom, teplotní rozsah až 1500 °C, palubní záznam dat). Tyto kamery musí vážit pod 500 g pro typické nosnosti vícerotorových dronů a musí být namontovány na 3osém stabilizovaném gimbalu, aby byly izolovány od vibrací a pohybu dronu. Integrace RTK GPS je nezbytná pro přesné geotagování každého termálního snímku, což umožňuje přesnou lokalizaci vad na mostních plánech.
Pasivní dronové IRT průzkumy mostních desek a vozovek musí být prováděny v obdobích dostatečného solárního zatížení. Optimální okno je 5–9 hodin po východu slunce (fáze vrcholného ohřevu, obvykle 10:00–15:00 v mírném podnebí) nebo 3–5 hodin po západu slunce (fáze vrcholného ochlazování, obvykle 20:00–00:00). Solární ozáření by mělo přesahovat 250 W-h/m² pro spolehlivý tepelný kontrast. Oblačnost, i rozptýlená, dramaticky snižuje tepelný kontrast, protože nahrazuje přímé sluneční záření difuzním zářením oblohy. Rychlost větru nad 24 km/h (15 mph) zhoršuje tepelný kontrast zvýšeným konvektivním ochlazováním. Povrch musí být suchý – stojatá voda nebo vlhkost vytvářejí falešné studené body v důsledku odpařovacího ochlazování. Průzkumy jsou neúčinné během deště, mlhy nebo zatažených podmínek a během zimních měsíců (říjen–únor na severní polokouli), kdy je sluneční záření nedostatečné. Některé silniční správy (DOT) doporučují provádět průzkumy mezi 11:00 a 14:00 místního času za jasných slunečných dnů od pozdního jara do začátku podzimu pro optimální výsledky.
Výška letu přímo určuje velikost pixelu na zemském povrchu (GSD) pro termální snímky – fyzickou velikost, kterou každý pixel představuje na snímaném povrchu. GSD = (Rozteč pixelů × Výška) / Ohnisková vzdálenost. Pro kameru DJI Zenmuse H20T (rozteč pixelů 12 µm, ohnisková vzdálenost 13,5 mm) ve výšce 30 m: GSD = (0,012 × 30) / 13,5 = 0,027 m = 2,7 cm/pixel. Ve výšce 75 m: GSD = 6,7 cm/pixel. Vyšší výška pokrývá větší plochu na snímek, ale snižuje prostorové rozlišení, což může způsobit, že malé vady zůstanou neodhaleny. Pro detekci delaminací mostních desek se doporučuje GSD 3–5 cm/pixel, což odpovídá výškám letu 30–60 m v závislosti na specifikacích kamery. Nižší výšky (15–25 m) se používají při inspekci malých vad nebo když je potřeba vyšší tepelný kontrast. Rychlost dronu musí být koordinována s výškou a snímkovací frekvencí kamery, aby se předešlo rozmazání pohybem – typické rychlosti průzkumu jsou 3–8 m/s (10–28 km/h).
Dronová IRT detekuje podpovrchové vady, které vytvářejí tepelné bariéry nebo mění tok tepla. V betonových mostních deskách: delaminace (horizontální oddělení v betonu, typicky v rovině výztuže), odtrh překryvu (ztráta soudržnosti mezi asfaltovým/betonovým překryvem a konstrukční deskou) a blízko-povrchové dutiny. V asfaltových vozovkách: mezivrstvový odtrh (oddělení mezi vrstvami vozovky), podpovrchové dutiny z problémů se zhutněním nebo poruch propustků a akumulace vlhkosti. Tepelný signál: horká místa během solárního ohřevu (pozitivní kontrast), protože vzduchové mezery izolují povrch od toku tepla do hlubšího materiálu, nebo teplé oblasti během nočního ochlazování (inverzní kontrast), protože vady zadržují teplo déle. Typický detekovatelný ΔT se pohybuje od 0,5 °C pro hluboké vady (>75 mm) do 3 °C nebo více pro mělké vady. Minimální detekovatelná plocha delaminace je přibližně 150×150 mm za dobrých tepelných podmínek. Hloubkový limit je typicky 100–150 mm od povrchu – vady hlubší než tato hodnota produkují tepelný kontrast pod prahem NETD kamery.
Dronová IRT a vozidlová IRT jsou komplementární metody s různými přednostmi. Vozidlová IRT (dle ASTM D4788) zachycuje termální data rychlostí až 113 km/h (70 mph) s šířkou záběru 4,6 m (15 stop), pokrývající typickou mostní desku za 30 minut bez uzavírky dopravy. Dronová IRT je pomalejší – typická rychlost pokrytí je ~475 m²/hod (asi 4 740 m² za den) při rychlostech průzkumu 3–8 m/s – ale poskytuje přístup k mostním prvkům nedosažitelným vozidly: spodní plochy desek, svislé plochy pilířů, opěry, konce nosníků, ložiska a interiéry propustků. Dronová IRT také umožňuje inspekci z více úhlů (shora dolů, šikmě, svisle) a může se dostat k mostům nad vodou, hlubokými údolími nebo environmentálně citlivými oblastmi, kde je vozidlový přístup nemožný. Náklady na čtvereční stopu u dronové IRT jsou přibližně 0,06–0,12 USD oproti 0,15–0,30 USD u vozidlové IRT včetně mobilizace, ačkoli dronové průzkumy vyžadují více letů pro ekvivalentní pokrytí desky. Optimální přístup využívá vozidlovou IRT pro rychlé screeningové prohlídky desek a dronovou IRT pro cílenou inspekci nepřístupných prvků.
Na data dronové IRT bylo aplikováno několik architektur hlubokého učení pro automatickou detekci vad. Konvoluční neuronové sítě U-Net dosahují sémantické segmentace tepelných anomálií na úrovni pixelů, vytvářejí přesné mapy hranic vad s ~84% přesností klasifikace uváděnou ve výzkumu. Modely detekce objektů založené na Transformeru, jako je Grounding DINO, dosáhly 70% střední průměrné přesnosti (mAP@[0.5:0.95]) na termálních datech mostních desek s průměrným průnikem přes sjednocení (IoU) 0,89. Varianty YOLO (You Only Look Once) umožňují detekci v reálném čase během letu pro okamžitou zpětnou vazbu operátorovi. Klasifikátory založené na CNN rozlišují delaminaci od falešně pozitivních jevů (povrchové prvky, vlhkost, nečistoty) učením se charakteristických tepelných signatur – velikost, tvar, ostrost hran, velikost ΔT a prostorový kontext. Metody extrakce příznaků analyzují parametry tepelné textury včetně střední teploty, směrodatné odchylky, šikmosti, špičatosti a entropie v klouzavých oknech. University of Central Florida představila AI-IRT rámec využívající model Transformer natrénovaný na více než 23 000 dronových/vozidlových IR snímcích ze tří floridských mostů za denních i nočních podmínek.
Operace dronové IRT musí být v souladu s předpisy národních leteckých úřadů. Ve Spojených státech FAA Part 107 řídí komerční operace dronů, vyžadující certifikát dálkového pilota, registraci letadla (250 g+), vizuální přímou viditelnost (VLOS), maximální výšku 120 m (400 ft) AGL a zákaz letu nad lidmi bez výjimky. Noční IRT průzkumy vyžadují výjimku pro noční provoz dle Part 107 nebo soulad s pravidlem pro noční operace z roku 2021 (protikolizní osvětlení, aktualizovaný certifikát dálkového pilota). Operace mimo vizuální přímou viditelnost (BVLOS) – potřebné pro dlouhé úseky vozovek nebo velké mostní desky – vyžadují BVLOS výjimku dle Part 107 se schváleným bezpečnostním případem. V Evropě nařízení EASA 2019/947 klasifikuje inspekci infrastruktury jako kategorii Specific, vyžadující provozní oprávnění, posouzení rizik dle metodiky SORA a certifikát provozovatele UAS. ICAO Circular 328 (2011) a ICAO Model UAS Regulations (2020) poskytují regulační rámec přijatý mnoha zeměmi. Provozovatelé dronů musí také dodržovat místní omezení vzdušného prostoru (blízkost letišť, oprávnění v řízeném vzdušném prostoru prostřednictvím LAANC v USA), zákony na ochranu soukromí a předpisy o ochraně dat.
Zpracování dat dronové IRT začíná radiometrickou kalibrací surových sekvencí termálních snímků, převodem detektorových hodnot na fyzikální teploty pomocí továrních kalibračních dat a korekcí atmosférické transmise. Jednotlivé georeferencované termální snímky jsou spojeny do ortomozaiček pomocí fotogrammetrie Structure-from-Motion (SfM) – vyžadující 70–80% podélný překryv a 60–70% příčný překryv mezi snímky. Termální mozaika je zarovnána s mostními plány nebo GIS daty pomocí souřadnic RTK GPS a pozemních kontrolních bodů pro absolutní přesnost 2–5 cm. Normalizace teploty koriguje prostorové odchylky v solárním zatížení, odezvě kamery a okolní teplotě napříč mozaikou. AI detekční modely skenují normalizovanou mozaiku pro tepelné anomálie, které jsou exportovány jako georeferencované shapefile nebo GeoJSON polygonové vrstvy. Každá anomálie je klasifikována podle závažnosti na základě velikosti ΔT: ΔT < 1 °C (monitorovat, nízká priorita), ΔT 1–3 °C (naplánovat opravu, střední priorita), ΔT 3–10 °C (opravit brzy, vysoká priorita), ΔT > 10 °C (okamžitá oprava, kritická priorita). Výsledky jsou sestaveny do inspekčních zpráv s termálními mapami překrytými přes mostní schémata, tabulkami anomálií se souřadnicemi a rozměry, hodnocením závažnosti a doporučenými následnými opatřeními. Integrace s vizuálními inspekčními daty TarmacView poskytuje komplexní databázi vad pro systémy správy mostů.
Dronová IRT má několik důležitých omezení. (1) Závislost na prostředí: vyžaduje jasnou oblohu, ≥250 W-h/m² slunečního záření, slabý vítr (<24 km/h), suchý povrch – okna pro průzkum jsou v mírném podnebí omezena na ~30 % denních hodin. (2) Hloubkové omezení: spolehlivě detekuje vady pouze do 100–150 mm od povrchu; hlubší vady produkují tepelný kontrast pod prahem detekce. (3) Útlum překryvem: asfaltové nebo betonové překryvy snižují tepelný kontrast o 50 % nebo více při tloušťce 50 mm; překryvy nad 100 mm mohou detekci znemožnit. (4) Žádné inherentní měření hloubky: konvenční dronová IRT nemůže určit hloubku vady bez časosběrných metod nebo doplňkového NDT. (5) Výdrž letu: typické lety omezené baterií na 20–30 minut omezují pokrytí na jeden let na ~2–4 hektary (0,5–1 akr). (6) Falešně pozitivní jevy: povrchové prvky – olejové skvrny, usazeniny gumy, vlhkost, stíny, variace textury povrchu, nečistoty – vytvářejí tepelné anomálie, které mohou být zaměněny za vady. (7) Regulační omezení: požadavek VLOS omezuje souvislý inspekční dosah; výjimky BVLOS vyžadují rozsáhlou bezpečnostní dokumentaci. (8) Variabilita emisivity povrchu: emisivita betonu a asfaltu se mění s typem kameniva, texturou povrchu, obsahem vlhkosti a povětrnostními vlivy, což ovlivňuje přesnost měření teploty.
Nasaďte dronovou IRT pro inspekce mostů
Spojte termovizní zobrazování z UAV s analýzou řízenou AI pro rychlou bezkontaktní detekci delaminací na mostních deskách a vozovkách. Získejte automatizované zprávy o tepelných anomáliích s integrací GIS – bez nutnosti uzavírek jízdních pruhů.
Automatizovaná dronová kontrola využívá předem naprogramované letové dráhy, počítačové vidění a AI analýzu k prohlídce infrastrukturních aktiv, včetně ranvejí, ...
Termální zobrazování vizualizuje teplotní rozdíly detekcí infračerveného záření, což umožňuje využití v průmyslu, bezpečnosti, zdravotnictví a dalších oblastech...