Risssegmentierung
Risssegmentierung ist die Computer-Vision-Aufgabe, jedes Pixel eines Bildes entweder als Riss oder als Nicht-Riss zu klassifizieren und eine binäre Maske zu erz...
30 Min. Lesezeit
Computer Vision
Deep Learning
+2
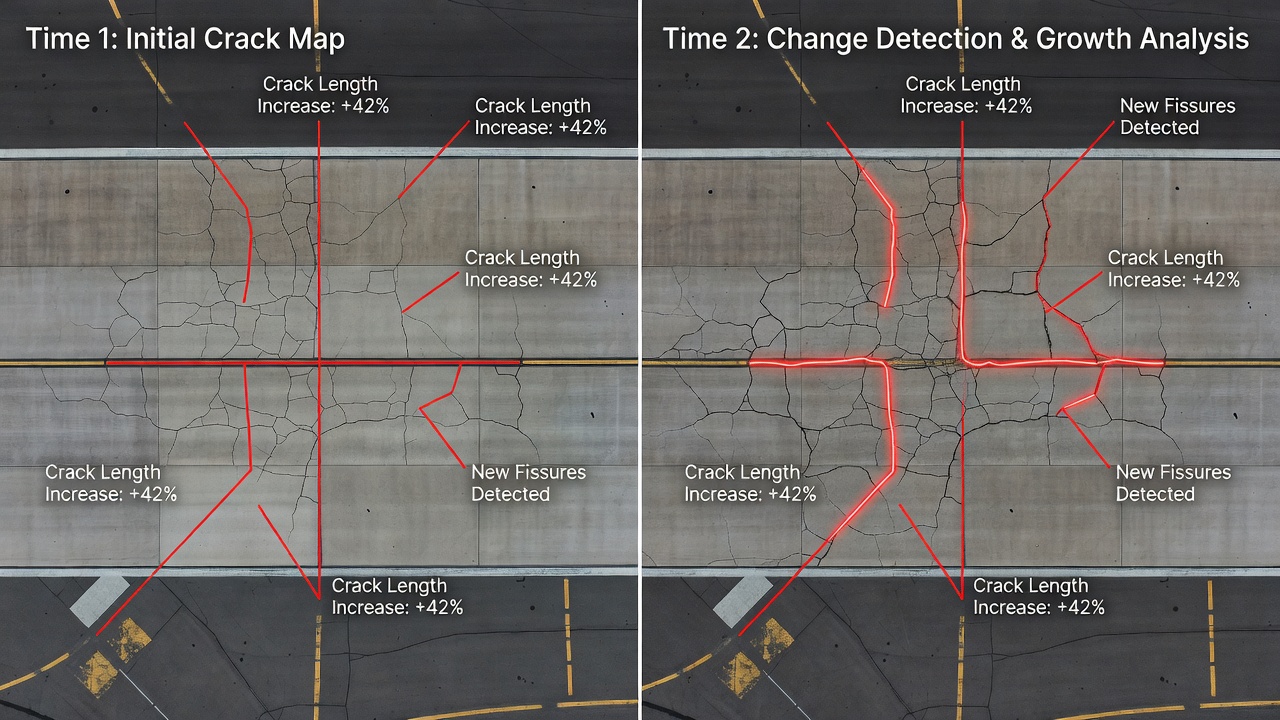
Änderungserkennung vergleicht coregistrierte Bilder oder Punktwolken derselben Struktur, die zu unterschiedlichen Zeitpunkten aufgenommen wurden, um neue, sich verschlechternde oder reparierte Schäden zu identifizieren — Risse, die gewachsen sind, Abplatzungen, die sich vergrößert haben, Korrosion, die sich ausgebreitet hat. Sie ermöglicht die quantitative Verfolgung von Verschlechterungsprozessen im Laufe der Zeit für die Infrastrukturüberwachung.
Änderungserkennung ist der Prozess der Identifizierung von Unterschieden im Zustand einer Struktur, Oberfläche oder Umgebung durch den Vergleich von Beobachtungen, die zu unterschiedlichen Zeitpunkten erfasst wurden. Im Kontext der zivilen Infrastrukturüberwachung vergleicht die Änderungserkennung systematisch coregistrierte Bilder, Orthomosaiken oder 3D-Punktwolken desselben Bauwerks — einer Startbahn, Brückenfahrbahn, Straße oder eines Gebäudes — die bei wiederholten Vermessungen aufgenommen wurden, um neue Schäden zu identifizieren, das Fortschreiten bestehender Verschlechterung zu quantifizieren und die Wirksamkeit von Instandhaltungsmaßnahmen zu überprüfen. Im Gegensatz zu einer einmaligen Inspektion, die nur eine Momentaufnahme des aktuellen Zustands liefert, offenbart die Änderungserkennung die zeitliche Dimension der Verschlechterung: welche Risse aktiv wachsen, welche Abplatzungsbereiche sich vergrößern, wo sich Korrosion ausbreitet und welche Verformungen sich anhäufen.
Der grundlegende Zweck der Änderungserkennung ist es, Infrastrukturzustandsdaten von statischen Momentaufnahmen in dynamische zeitliche Aufzeichnungen zu überführen. Eine einzelne Inspektion beantwortet die Frage „Wie ist der aktuelle Zustand?" Die Änderungserkennung beantwortet die betrieblich relevantere Frage „Wie verändert sich der Zustand?" Diese Unterscheidung ist für das Infrastruktur-Anlagenmanagement von entscheidender Bedeutung, da Verschlechterung ein dynamischer Prozess ist. Ein Riss, der drei Jahre lang stabil bei 0,3 mm Breite geblieben ist, stellt eine andere Instandhaltungspriorität dar als ein Riss, der im gleichen Zeitraum von 0,3 mm auf 1,5 mm gewachsen ist, obwohl beide Risse in einer einzelnen Inspektion identisch erscheinen. Die Änderungserkennung quantifiziert diese Verschlechterungsrate und ermöglicht eine zustandsbasierte Instandhaltungsplanung, Budgetprognose und Risikobewertung, die mit statischen Inspektionen allein unmöglich sind.
Im Flughafenbefestigungsmanagement gemäß ICAO Annex 14 — Aerodromes, Volume I ist der Flugplatzbetreiber verpflichtet, die Befestigungen in einem Zustand zu halten, der Schäden an Luftfahrzeugen verhindert und frei von losem Material ist. Während regelmäßige Sichtprüfungen die grundlegende Einhaltung erfüllen, betonen ICAO Doc 9157 (Aerodrome Design Manual, Part 3: Pavements) und die Norm ASTM D5340 für den Flughafen-Befestigungszustandsindex (PCI) die Bedeutung der Verfolgung von Verschlechterungstrends im Zeitverlauf. Die Änderungserkennung liefert die quantitative Grundlage für die Trendanalyse und ermöglicht es Flughafenbetreibern, Befestigungen mit beschleunigenden Verschlechterungsraten zu identifizieren, bevor sie kritische Zustandsstufen erreichen. Die Methodik unterstützt direkt die Ziele des ICAO Global Air Navigation Plan (GANP) für Infrastrukturresilienz und risikobasierte Instandhaltungsoptimierung.
Das Konzept der Änderungserkennung stammt aus der Fernerkundung und Geodatenanalyse, wo es für die Überwachung von Landnutzungsänderungen, Entwaldungsverfolgung und Stadtentwicklungsanalyse mittels Satellitenbildern entwickelt wurde. Diese grundlegenden Methoden — Bilddifferenzierung, Hauptkomponentenanalyse und Post-Klassifikationsvergleich — wurden für Infrastrukturanwendungen angepasst und erweitert, bei denen der Maßstab der Veränderung viel kleiner ist (Millimeter bis Zentimeter statt Meter bis Kilometer) und die Genauigkeitsanforderungen entsprechend höher sind. Die moderne Infrastruktur-Änderungserkennung arbeitet mit Submillimeter-Empfindlichkeit für Rissmessungen und Subzentimeter-Empfindlichkeit für Verformungsüberwachung.
Zuverlässige Änderungserkennung hängt grundlegend von der Genauigkeit der Bildregistrierung ab — dem Prozess der geometrischen Ausrichtung von zwei oder mehr Bildern derselben Szene, sodass entsprechende Pixel dieselbe physikalische Position auf der Struktur repräsentieren. Ohne präzise Registrierung enthält jeder Vergleich zwischen Bildern unechte Änderungssignale an Objektkanten, Texturgrenzen und Oberflächenmerkmalen, die lediglich falsch ausgerichtet und nicht physikalisch verändert sind. Registrierungsfehler von nur einem Pixel können falsche Änderungsartefakte erzeugen, die echte Schadenssignale überlagern, insbesondere bei kleinen Schäden wie Rissen, die in typischen Infrastrukturbildern nur 2-5 Pixel breit sein können.
Die Beziehung zwischen Registrierungsgenauigkeit und minimal erkennbarer Veränderung wird durch das Signal-Rausch-Verhältnis des Erkennungssystems bestimmt. Bei pixelbasierten Änderungserkennungsmethoden erscheinen Registrierungsfehler als additives Rauschen im Differenzbild. Die Forschung zeigt konsistent, dass eine Subpixel-Registrierungsgenauigkeit — typischerweise besser als 0,5 Pixel RMSE — für die zuverlässige Erkennung kleiner Schadensveränderungen erforderlich ist. Bei einem Bodenauflösungsvermögen (GSD) von 1 mm pro Pixel (typisch für Präzisionsstartbahnvermessungen) entspricht dies einer geometrischen Ausrichtungstoleranz von 0,5 mm. Das Erreichen dieser Toleranz über wiederholte Vermessungen, die Monate oder Jahre auseinander liegen, erfordert konsistente Vermessungsmethoden, stabile Passpunktnetze und robuste Registrierungsalgorithmen.
Die merkmalsbasierte Registrierung identifiziert unterscheidbare, wiederholbare Merkmale sowohl im Referenz- als auch im Zielbild, stellt Korrespondenzen zwischen diesen Merkmalen her und berechnet die geometrische Transformation, die das Zielbild in das Koordinatensystem des Referenzbildes überführt. Dieser Ansatz ist die am weitesten verbreitete Methode für die Infrastruktur-Änderungserkennung, da er robust gegenüber Beleuchtungsschwankungen, moderaten Unterschieden im Betrachtungswinkel und saisonalen Veränderungen der Oberflächenerscheinung ist, die keine strukturelle Verschlechterung darstellen.
Die Registrierungspipeline beginnt mit der Merkmalsdetektion unter Verwendung von Algorithmen, die auf Wiederholbarkeit unter verschiedenen Bildgebungsbedingungen ausgelegt sind. Scale-Invariant Feature Transform (SIFT) bleibt der am weitesten verbreitete Detektor für die Infrastrukturregistrierung und identifiziert Schlüsselpunkte an Stellen hoher räumlicher Gradienten, die robust gegenüber Skalenänderungen und Rotation sind. Speeded-Up Robust Features (SURF) bietet schnellere Berechnung mit vergleichbarer Leistung für viele Anwendungen. Für Befestigungsoberflächen mit relativ gleichmäßiger Textur bieten ORB-Merkmale (orientierte FAST und rotierte BRIEF) und AKAZE-Merkmale Alternativen mit unterschiedlichen Abwägungen zwischen Recheneffizienz und Matchings-Robustheit. Ein typisches 20-Megapixel-Orthomosaik eines 500 Meter langen Startbahnabschnitts liefert 10.000 bis 50.000 erkennbare Merkmale, abhängig von der Befestigungstextur, dem Fugenabstand und den Oberflächenmarkierungen.
Das Merkmalsmatching stellt Korrespondenzen zwischen erkannten Merkmalen im Referenz- und Zielbild unter Verwendung der Ähnlichkeit von Deskriptorvektoren her, die typischerweise als euklidischer oder Hamming-Abstand zwischen Deskriptorvektoren gemessen wird. Die anfängliche Menge an Übereinstimmungen enthält zwangsläufig Ausreißer — falsche Korrespondenzen, die durch sich wiederholende Muster, ähnliche Texturbereiche oder Merkmalsmehrdeutigkeit entstehen. Die Ausreißereliminierung verwendet RANSAC (Random Sample Consensus) oder seine Varianten (MLESAC, MSAC), um iterativ das Transformationsmodell zu schätzen, während Übereinstimmungen basierend auf ihrer Konsistenz mit dem geschätzten Modell als Inlier oder Outlier klassifiziert werden. Ein RANSAC-Schwellenwert von 2-3 Pixeln bei Orthomosaikauflösung ist für die Infrastruktur-Änderungserkennung typisch und verwirft Übereinstimmungen, deren Restfehler diesen Wert überschreitet.
Das geometrische Transformationsmodell wird basierend auf der erwarteten Verzerrung zwischen den Vermessungen ausgewählt. Für wiederholte Drohnenvermessungen, die mit konsistenten Flugparametern und RTK-Positionierung durchgeführt werden, ist typischerweise eine Ähnlichkeitstransformation (Translation, Rotation, gleichmäßige Skalierung) oder eine affine Transformation (sechs Parameter: zwei Translationen, zwei Skalierungen, zwei Scherungen) ausreichend. Für Vermessungen mit signifikanten Perspektivenunterschieden oder Geländevariation kann eine projektive Transformation (acht Parameter, auch Homographie genannt) oder eine polynomiale Transformation (höherer Ordnung, typischerweise 2. oder 3. Ordnung für großflächige Vermessungen) erforderlich sein. Die Transformation wird aus den Inlier-Korrespondenzen mittels Kleinste-Quadrate-Schätzung berechnet, wobei der Residual-RMSE als primäres Qualitätsmerkmal dient. Ein Registrierungs-RMSE unter 0,5 Pixeln ist das Ziel für eine hochwertige Änderungserkennung; ein RMSE über 1 Pixel weist auf die Notwendigkeit verbesserter Passpunkte oder einer geeigneteren Transformationsmodellauswahl hin.
Die intensitätsbasierte Registrierung arbeitet direkt mit Pixelintensitätswerten anstelle diskreter Merkmale, indem sie die Transformationsparameter optimiert, um ein Ähnlichkeitsmaß zu maximieren, das über den überlappenden Bildbereich berechnet wird. Dieser Ansatz ist vorteilhaft, wenn der Bildinhalt nicht genügend unterscheidbare Merkmale für ein zuverlässiges Merkmalsmatching aufweist — zum Beispiel bei frisch verlegten Betonoberflächen, gleichmäßig texturiertem Asphalt oder mit Wasser oder Schmutz bedeckten Oberflächen. Intensitätsbasierte Methoden werden auch zur Feinjustierung nach einer anfänglichen merkmalsbasierten Registrierung verwendet, um die Subpixel-Genauigkeit zu erreichen, die für die hochempfindliche Änderungserkennung erforderlich ist.
Der Optimierungsprozess transformiert iterativ das Zielbild, berechnet das Ähnlichkeitsmaß gegenüber dem Referenzbild und passt die Transformationsparameter an, um das Maß zu verbessern. Übliche Ähnlichkeitsmaße sind:
Normalisierte Kreuzkorrelation (NCC) berechnet den Korrelationskoeffizienten zwischen entsprechenden Pixelintensitäten nach Normalisierung jedes Bildausschnitts auf Mittelwert Null und Einheitsstandardabweichung. NCC-Werte reichen von -1 bis +1, wobei Werte nahe 1 auf eine starke Ausrichtung hinweisen. NCC ist robust gegenüber linearen Intensitätsunterschieden zwischen Bildern und eignet sich daher für Vermessungen mit unterschiedlichen Belichtungseinstellungen oder geringfügigen Beleuchtungsänderungen.
Gegenseitige Information (MI) misst die statistische Abhängigkeit zwischen den Intensitätsverteilungen der beiden Bilder basierend auf der Informationsentropie. MI ist besonders robust gegenüber nichtlinearen Intensitätsunterschieden zwischen Bildern, wie sie durch verschiedene Sensortypen, saisonale Vegetationsveränderungen oder nasse versus trockene Oberflächenbedingungen verursacht werden. Die MI zwischen zwei perfekt ausgerichteten Bildern derselben Szene ist maximiert, wenn die gemeinsame Intensitätsverteilung eine minimale Entropie aufweist — d. h., die Beziehung zwischen den Intensitäten ist so vorhersagbar wie möglich.
Summe der quadrierten Differenzen (SSD) und Summe der absoluten Differenzen (SAD) sind die einfachsten Maße und berechnen direkt die pixelweise Intensitätsdifferenz. Sie nehmen an, dass entsprechende Pixel in den beiden Bildern nach geometrischer Ausrichtung identische Intensitäten haben sollten — eine Annahme, die in der Praxis aufgrund von Beleuchtungs-, Belichtungs- und Sensorantwortvariationen selten gültig ist. SSD und SAD werden typischerweise nur für den Multi-View-Stereoabgleich innerhalb eines einzelnen Vermessungszeitpunkts verwendet, nicht für die zeitübergreifende Änderungserkennung.
Optimierungsalgorithmen für die intensitätsbasierte Registrierung umfassen Gradientenabstieg, Powells Methode und den Levenberg-Marquardt-Algorithmus. Mehrfachauflösungsstrategien (grob zu fein) sind Standard, beginnend mit herunterskalierten Bildern zur Schätzung der ungefähren Ausrichtung und fortschreitender Verfeinerung bei höheren Auflösungen. Für die Infrastruktur-Änderungserkennung erreicht die intensitätsbasierte Registrierung typischerweise eine Genauigkeit von 0,1-0,3 Pixeln nach der Feinjustierung, verglichen mit 0,3-0,8 Pixeln für rein merkmalsbasierte Methoden.
Die georeferenzierte Registrierung verwendet eingemessene Passpunkte (GCPs) und präzise Kamerapositionen von RTK (Real-Time Kinematic) oder PPK (Post-Processed Kinematic) GNSS, um direkt die geometrische Beziehung zwischen Bildern und realen Koordinaten herzustellen. Jedes Bild wird mit seiner Kameraposition (X, Y, Z) und Orientierung (Omega, Phi, Kappa) vom bordseitigen GNSS/IMU geotaggt, und diese Informationen werden während der photogrammetrischen Verarbeitung unter Verwendung von auf Zentimetergenauigkeit eingemessenen GCPs verfeinert.
Für die Änderungserkennung besteht der Hauptvorteil der georeferenzierten Registrierung darin, dass wiederholte Vermessungen inhärent auf dasselbe Koordinatensystem ausgerichtet sind, was das Registrierungsproblem erheblich reduziert. Anstatt paarweise Transformationen zwischen Vermessungszeitpunkten zu berechnen, wird jede Vermessung unabhängig verarbeitet, um Orthomosaiken und Punktwolken in einem gemeinsamen Koordinatenreferenzsystem (typischerweise WGS84 mit lokaler transversaler Mercatorprojektion) zu erzeugen. Die verbleibende Fehlausrichtung zwischen Vermessungen wird dann durch eine Resttransformation korrigiert, die aus stabilen Merkmalen geschätzt wird, die in beiden Datensätzen sichtbar sind — Befestigungsmarkierungen, Startbahnbefeuerung, Fugenabdichtungen oder spezielle Vermessungsziele.
Die Norm ISO 19157 für die Qualität geografischer Informationen legt Positionsgenauigkeitsanforderungen für Geodaten fest, die direkt auf die georeferenzierte Änderungserkennung anwendbar sind. Für die Infrastrukturüberwachung sind typische Genauigkeitsziele ein horizontaler RMSE besser als 3 cm und ein vertikaler RMSE besser als 5 cm für Befestigungsvermessungen. Wenn diese Genauigkeiten durch GCP-basierte Photogrammetrie oder RTK-Drohnenpositionierung erreicht werden, beträgt der verbleibende Registrierungsfehler zwischen wiederholten Vermessungen typischerweise 1-3 Pixel bei 1 mm GSD, der dann durch Feinregistrierung weiter auf Subpixel-Niveau reduziert wird.
Der ICAO Annex 15 — Aeronautical Information Services legt Qualitätsanforderungen für Luftfahrtdaten fest, die die Planung von Änderungserkennungsvermessungen beeinflussen. Vermessungsdaten, die für das Flughafenbefestigungsmanagement verwendet werden, müssen definierte Genauigkeits-, Auflösungs- und Integritätsniveaus erfüllen, die der Kritikalität der Daten entsprechen. Für Änderungserkennungsanwendungen, bei denen Vermessungsdaten Instandhaltungsentscheidungen beeinflussen, die die Startbahnsicherheit betreffen, sind die Datenqualitätsanforderungen entsprechend streng und erfordern eine dokumentierte Genauigkeitsverifizierung unter Verwendung unabhängiger Kontrollpunkte und umfassender Metadatenberichterstattung.
Die Bilddifferenzierung ist die direkteste und recheneffizienteste Methode der Änderungserkennung. Nach der Registrierung wird die pixelweise Differenz zwischen dem Referenzbild und dem Zielbild berechnet: Differenz(x, y) = I_Ziel(x, y) - I_Referenz(x, y). Bei Graustufenbildern mit 8-Bit-Intensitätswerten (0-255) reicht das Differenzbild von -255 bis +255 und wird typischerweise zur Visualisierung auf 0-255 umskaliert. Bereiche ohne Veränderung erzeugen nahezu Null-Differenzwerte (abhängig von Sensorrauschen und geringfügigen Beleuchtungsschwankungen), während Bereiche mit physikalischer Veränderung signifikante positive oder negative Abweichungen erzeugen.
Der kritische Parameter bei der Bilddifferenzierung ist die Änderungsschwelle — die Differenzmagnitude, ab der ein Pixel als verändert klassifiziert wird. Die Auswahl einer geeigneten Schwelle erfordert eine Abwägung zwischen Erkennungsrate (korrekte Identifizierung echter Veränderungen) und Falschalarmrate (fälschliche Klassifizierung unveränderter Pixel als verändert). Die optimale Schwelle hängt vom Signal-Rausch-Verhältnis des Bildgebungssystems, der Registrierungsgenauigkeit und der Magnitude der angestrebten Veränderungen ab. Übliche Ansätze zur Schwellenauswahl sind:
Standardabweichungs-Schwellenwertsetzung setzt die Schwelle auf k × σ, wobei σ die Standardabweichung des Differenzbildes in Bereichen ist, die bekanntermaßen unverändert sind, und k ein Multiplikator typischerweise zwischen 2 und 5 ist. Eine Schwelle von 3σ entspricht etwa 99,7 % Konfidenz, dass eine diesen Wert überschreitende Pixeldifferenz eine echte Veränderung darstellt, unter Annahme normalverteilten Rauschens.
Otsus Methode berechnet die Schwelle, die die Intra-Klassen-Varianz zwischen Veränderungs- und Nichtveränderungspixeln minimiert und sich automatisch an die statistischen Eigenschaften jedes Differenzbildes anpasst. Dies ist effektiv, wenn die Veränderungsfläche einen moderaten Anteil des Gesamtbildes ausmacht (5-30 %).
Bayessche Schwellenwertsetzung modelliert das Differenzbild als Mischung zweier Verteilungen — Nichtveränderungspixel folgen einer schmalen Gauß-Verteilung mit Zentrum bei Null, Veränderungspixel folgen einer breiteren Verteilung mit möglicherweise von Null abweichendem Mittelwert. Der Expectation-Maximization (EM)-Algorithmus schätzt die Parameter beider Verteilungen, und die optimale Schwelle wird aus dem Schnittpunkt der beiden Verteilungen berechnet.
Die Bilddifferenzierung ist am effektivsten für die Erkennung von Veränderungen des Oberflächenerscheinungsbildes: neue Risse (dunkle lineare Merkmale auf hellem Belag), Verfärbungen durch Leckagen oder Chemikalienverschüttungen, Vegetationswachstum und Oberflächenverfärbungen durch Korrosionsbeginn. Sie ist weniger effektiv für die Quantifizierung geometrischer Veränderungen, die keine starken Intensitätsunterschiede erzeugen — zum Beispiel Rissverbreiterung, bei der der Riss im Referenzbild bereits sichtbar war und die Breitenzunahme nur subtile Kantenverschiebungen erzeugt.
Die auf die Änderungserkennung angewandte Hauptkomponentenanalyse (PCA) transformiert multitemporale Bilddaten in ein neues Koordinatensystem, in dem Änderungsinformationen in bestimmten Komponenten konzentriert sind. Für ein Bildpaar (Referenz und Ziel) wird die PCA auf der kombinierten Datenmatrix berechnet, wodurch zwei Hauptkomponenten entstehen. Die erste Hauptkomponente erfasst die gemeinsamen Informationen — die Pixel, die in beiden Bildern ähnlich sind. Die zweite Hauptkomponente erfasst die residuelle Differenz — die Änderungsinformationen.
Der Vorteil der PCA gegenüber der einfachen Differenzierung besteht darin, dass sie die Daten automatisch dekorreliert und Änderungssignale von systematischen Unterschieden in Gesamthelligkeit, Kontrast und Sensoransprache trennt. Dies macht PCA robuster gegenüber Beleuchtungsschwankungen zwischen den Vermessungen. Das PCA-Änderungsbild (typischerweise die zweite Hauptkomponente) offenbart oft subtile Veränderungen, die bei direkter Differenzierung im Rauschen untergehen würden.
Für die multitemporale Analyse mit drei oder mehr Vermessungszeitpunkten erweitert die Multivariate Alteration Detection (MAD) das PCA-Konzept. MAD findet lineare Transformationen der multitemporalen Daten, die die Korrelation zwischen transformierten Bändern maximieren, und identifiziert dann Veränderungen als Abweichungen von dieser Korrelationsstruktur. Die MAD-Komponenten sind nach abnehmendem Änderungsinformationsgehalt geordnet, sodass der Analyst sich auf die signifikantesten Änderungssignale konzentrieren kann. Iterativ neu gewichtete MAD (IR-MAD) verbessert die Robustheit durch iterative Herabgewichtung von Pixeln, die in vorherigen Iterationen als verändert identifiziert wurden, und verfeinert so das Hintergrundmodell ohne Veränderung.
Methoden des maschinellen Lernens für die Änderungserkennung haben mit der Verfügbarkeit großer Trainingsdatensätze und Deep-Learning-Architekturen erhebliche Fortschritte gemacht. Diese Methoden lernen die Abbildung von Bildpaaren auf Änderungskarten direkt aus beschrifteten Beispielen, anstatt sich auf manuell festgelegte Schwellenwerte oder statistische Modelle zu verlassen. Drei Hauptkategorien ML-basierter Änderungserkennung sind für die Infrastrukturüberwachung relevant:
Pixelbasierte Klassifizierung behandelt jedes Pixel unabhängig und klassifiziert es als Veränderung oder Nichtveränderung basierend auf Merkmalen, die aus den entsprechenden Pixeln in beiden Bildern sowie dem Nachbarschaftskontext extrahiert werden. Merkmale können spektrale Differenzen, Texturmaße (GLCM, Gabor-Filter), lokale räumliche Statistiken und Multi-Skalen-Repräsentationen umfassen. Random Forest, Support Vector Machines (SVM) und Gradient-Boosting-Klassifikatoren sind gängige Optionen. Das Training erfordert beschriftete Änderungskarten für eine repräsentative Menge von Infrastrukturoberflächen und Schadensarten.
Patch-basiertes Deep Learning verwendet Convolutional Neural Networks (CNNs), die auf Bildausschnitten operieren, die auf jedes Pixel zentriert sind. Eine Siamese-Netzwerkarchitektur verarbeitet den Referenzausschnitt und den Zielausschnitt durch zwei identische CNN-Zweige mit gemeinsamen Gewichten, dann fusioniert ein Vergleichsmodul (Verkettung, Differenzbildung oder Korrelation) die Merkmalsrepräsentationen, und ein Klassifikationskopf erzeugt die Änderungswahrscheinlichkeit für das zentrale Pixel. UNet-basierte Architekturen mit Skip-Verbindungen sind besonders effektiv für die Änderungserkennung, da sie die räumliche Auflösung erhalten und gleichzeitig Multi-Skalen-Kontext integrieren. Trainingsdatensätze für die Infrastruktur-Änderungserkennung müssen repräsentative Beispiele jeder Schadensart (Risse, Abplatzungen, Korrosion, Verfärbungen) unter wechselnden Beleuchtungs- und Oberflächenbedingungen enthalten.
Objektbasierte Änderungserkennung (OBIA) segmentiert das Bild zunächst in sinnvolle Objekte — einzelne Befestigungsplatten, Risssegmente, Abplatzungsbereiche — und vergleicht dann Objekte über die Zeit hinweg anstelle von Pixeln. Dieser Ansatz ist besonders gut für die Infrastrukturüberwachung geeignet, da Schäden von Natur aus objektartig sind: Eine Abplatzung ist eine zusammenhängende Region, ein Riss ist ein linienförmiges Merkmal, Korrosionsflecken sind räumlich kohärent. Die objektbasierte Änderungserkennung berechnet Veränderungen der Objekteigenschaften (Fläche, Umfang, Form, mittlere Intensität) und klassifiziert Objekte als stabil, wachsend, schrumpfend oder neu. Der objektbasierte Ansatz reduziert inhärent Rauschen von isolierten Pixelartefakten und liefert Änderungsinformationen in Begriffen, die direkt für die Infrastrukturzustandsbewertung relevant sind — Fläche neuer Abplatzungen, Länge der Risserweiterung, prozentuale Zunahme der Korrosionsbedeckung.
| Methode | Typische Genauigkeit | Stärken | Einschränkungen |
|---|---|---|---|
| Bilddifferenzierung | 60-75 % Pixelgenauigkeit | Einfach, schnell, interpretierbar | Empfindlich gegenüber Beleuchtung, benötigt optimale Schwelle |
| PCA / MAD | 70-85 % Pixelgenauigkeit | Robust gegenüber Helligkeitsschwankungen | Erfordert multispektrale oder multitemporale Daten |
| Random Forest / SVM | 75-88 % Pixelgenauigkeit | Behandelt nichtlineare Beziehungen | Benötigt beschriftete Trainingsdaten, begrenzte Generalisierung |
| CNN (Siamese UNet) | 85-95 % Pixelgenauigkeit | Hohe Genauigkeit, lernt räumlichen Kontext | Große Trainingsdaten erforderlich, rechenintensiv |
| OBIA | 80-92 % Objektgenauigkeit | Änderungsmetriken entsprechen Schadenssemantik | Segmentierungsqualität abhängig, komplexer Workflow |
Die Rissänderungserkennung ist die häufigste und betrieblich wichtigste Anwendung der Zeitreihenanalyse für die Infrastrukturüberwachung. Risswachstum — die Zunahme von Rissbreite, -länge oder -dichte im Laufe der Zeit — ist der primäre Indikator für aktive Verschlechterung in Beton- und Asphaltstrukturen. Die Änderungserkennung für Risse muss mit Submillimeter-Empfindlichkeit arbeiten, da die gemessenen Unterschiede oft kleiner sind als der Riss selbst: Ein Riss, der in der Basisvermessung 0,5 mm breit war und in der Folgevermessung 1,2 mm breit ist, stellt eine Veränderung von 0,7 mm dar, die zuverlässig gegen Bildrauschen und Registrierungsunsicherheit erkannt werden muss.
Die Rissänderungserkennung auf Pixelebene verwendet die differenzielle Risskartierung, bei der Risswahrscheinlichkeitskarten aus jedem Vermessungszeitpunkt verglichen werden. Die Risswahrscheinlichkeitskarte — erzeugt durch ein Deep-Learning-Risssegmentierungsmodell oder durch einen konventionellen Risserkennungsalgorithmus — weist jedem Pixel einen Wert zwischen 0 (kein Riss) und 1 (sicherer Riss) zu. Die Änderungskarte ist die pixelweise Differenz der Risswahrscheinlichkeit zwischen den Zeitpunkten, wobei positive Werte auf neue oder verbreiterte Risse und negative Werte auf abgeheilte oder versiegelte Risse hinweisen. Morphologische Filterung entfernt isolierte veränderte Pixel, und eine Connected-Component-Analyse gruppiert veränderte Pixel zu diskreten Änderungsobjekten.
Die quantitative Rissbreitenänderungsmessung erfordert eine Subpixel-Kantenlokalisierung. Für jedes Risssegment im Rissnetzwerk werden die Risskanten mit Subpixel-Auflösung extrahiert, unter Verwendung von Methoden wie der stufenförmigen Kantenerkennung (Anpassung der Kantenantwort an eine Stufenfunktion und Auffinden des Subpixel-Nulldurchgangs), der momentenbasierten Kantenerkennung (Berechnung der Kantenposition aus Bildmomenten) oder aktiven Konturmodellen (Snakes), die sich entwickeln, um den Rissgrenzen zu entsprechen. Die Breite an jedem Punkt entlang des Risses wird als Abstand zwischen den beiden Subpixel-Kantenpositionen senkrecht zur Rissmittellinie berechnet. Die Breitenänderung ist dann die punktweise Differenz zwischen den Zeitpunkten, und die mittlere Breitenzunahme über die Risssegmentlänge ist die zusammenfassende Statistik. Bei Flughafenbefestigungsvermessungen mit 1 mm GSD ist eine Rissbreitenänderung von 0,2-0,3 mm mit Subpixel-Methoden bei einer Kantenlokalisierungspräzision von 0,1 Pixeln zuverlässig erkennbar.
Die Risslängenerweiterung misst die Zunahme der Gesamtlänge des Rissnetzwerks. Dies erfordert die Vektorisierung des Rissgerüsts in jedem Zeitpunkt als Satz von Polylinien, dann das Matching von Risssegmenten zwischen den Zeitpunkten unter Verwendung von räumlichen Überlappungs- und Nähekriterien. Neue Risserweiterung erscheint als Risssegmente in der Folgevermessung, die mit keinem Risssegment in der Basisvermessung überlappen, aber mit bestehenden Rissen verbunden sind. Die Risswachstumsrate — mm pro Monat oder mm pro Jahr — wird durch Division der Gesamtlängenzunahme durch das Zeitintervall zwischen den Vermessungen berechnet. Für Autobahn- und Flughafenbefestigungen liegen typische Risswachstumsraten zwischen 0,5-5 mm pro Monat, abhängig von Verkehrsbelastung, Umgebungsbedingungen und struktureller Tragfähigkeit der Befestigung.
Die Neue Risserkennung identifiziert Risspixel oder Rissobjekte, die in der Folgevermessung erscheinen, aber in der Basisvermessung nicht vorhanden waren. Dies erfordert die Unterscheidung tatsächlicher neuer Risse von Falschpositiven, die durch Registrierungsfehlausrichtung, Beleuchtungsunterschiede oder Oberflächenfeuchtigkeitsartefakte verursacht werden. Der Erkennungsprozess umfasst typischerweise die folgenden Schritte:
Erzeugung der Basis-Rissmaske unter Verwendung eines validierten Risserkennungsmodells mit bekannter Falschpositivrate. Die Basis-Maske sollte konservativ übersegmentieren anstatt untersegmentieren — die Einbeziehung unsicherer Risskandidaten verringert die Wahrscheinlichkeit, neue Risse zu übersehen, die in der Basisvermessung teilweise sichtbar waren.
Erzeugung der Folge-Rissmaske unter Verwendung desselben Risserkennungsmodells und derselben Verarbeitungsparameter, angewandt auf das coregistrierte Folge-Orthomosaik. Die konsistente Anwendung des Erkennungsalgorithmus ist wesentlich; Änderungen des Erkennungsmodells oder der Verarbeitungsparameter zwischen den Zeitpunkten würden nichtphysikalische Änderungssignale erzeugen.
Berechnung der Änderungsmaske durch Identifizierung von Pixeln, die in der Folge-Maske Riss sind, aber in der Basis-Maske nicht. Die morphologische Öffnung (Erosion gefolgt von Dilatation) entfernt isoliertes Pixelrauschen und dünne Artefakte an Risskanten, die durch Subpixel-Fehlregistrierung verursacht werden.
Geometrische Filterung eliminiert Änderungsobjekte, die die Rissgeometriekriterien nicht erfüllen — Mindestlänge (typischerweise >10 Pixel), Mindestaspektverhältnis (Längen-Breiten-Verhältnis >3) und Konnektivität zu bestehenden Rissnetzwerken. Isolierte Pixelcluster, die keine linienförmigen Merkmale bilden, werden als Nicht-Riss-Artefakte klassifiziert.
Validierung durch manuelle Inspektion oder Grundwahrheit einer Stichprobe erkannter Veränderungen zur Kalibrierung der Falschpositivrate und Anpassung der Erkennungsparameter.
Die minimal erkennbare neue Rissbreite entspricht ungefähr dem GSD der Bilddaten — typischerweise 1-2 mm für Startbahnvermessungen. Risse, die schmaler als der GSD sind, können dennoch erkennbar sein, wenn sie einen messbaren Intensitätsunterschied (Kontrast) im Bild erzeugen, aber die Erkennungssicherheit nimmt für Risse mit Subpixel-Breite ab. Die Rissänderungserkennungspipeline von TarmacView erreicht eine Erkennungsrate von 90-95 % für neue Risse breiter als 2 mm bei 1 mm GSD, mit einer Falschpositivrate unter 5 % für typische Flughafenbefestigungsoberflächen.
Abplatzung — das Fragmentieren und Ablösen von Oberflächenmaterial von Beton oder Mauerwerk — erzeugt sichtbare Vertiefungen, freiliegende Gesteinskörnung und scharfe Kanten an der Grenze zwischen intaktem und geschädigtem Material. Die Änderungserkennung für Abplatzungen quantifiziert die Zunahme von Abplatzungsfläche, -tiefe und -umfang im Laufe der Zeit. Im Gegensatz zur Risserkennung, die auf linienförmigen Merkmalen operiert, erfordert die Abplatzungserkennung eine genaue Abgrenzung unregelmäßiger Flächenmerkmale.
Die Abplatzungsänderungserkennung verwendet den segmentierungsbasierten Vergleich zwischen Vermessungszeitpunkten. Die Abplatzungsgrenze wird in jedem Orthomosaik entweder manuell durch Prüfer, halbautomatisch mit interaktiven Segmentierungswerkzeugen (GrabCut, Watershed oder Active-Contour-Algorithmen) oder vollautomatisch mit Deep-Learning-Segmentierungsmodellen (Mask R-CNN, DeepLab oder UNet, trainiert auf Abplatzungsdatensätzen) abgegrenzt. Sobald die Abplatzungsgrenzen in jedem Zeitpunkt als Polygone extrahiert wurden, werden die Änderungsmetriken berechnet:
Flächenänderung = Fläche_Folge - Fläche_Basis (typischerweise in cm² oder m² angegeben). Flächenwachstumsrate = Flächenänderung / Zeitintervall (cm²/Monat oder m²/Jahr). Umfangsänderung misst die Komplexität der Abplatzungsgrenze, während sie in zuvor intaktes Material vordringt. Radiales Wachstum misst den maximalen Abstand von der ursprünglichen Abplatzungsgrenze zur neuen Grenze in jede Richtung und gibt die Richtung der schnellsten Verschlechterung an.
Bei Betonkonstruktionen variieren die Abplatzungswachstumsraten stark je nach Ursachenmechanismus. Abplatzungen, die durch korrosionsbedingte Delamination verursacht werden, wachsen in aggressiven Umgebungen typischerweise mit Raten von 1-5 cm radialer Ausdehnung pro Jahr. Abplatzungen, die durch Frost-Tau-Wechsel verursacht werden, zeigen saisonale Wachstumsmuster, die sich im Winter und Frühjahr konzentrieren. Abplatzungen, die durch Aufprall oder Überlastung verursacht werden, treten typischerweise plötzlich auf und können stabil bleiben, wenn die Belastungsursache behoben wird.
Die Korrosionsänderungserkennung identifiziert Bereiche, in denen Korrosionsprodukte (Rost auf Stahl, Oxidationsverfärbung auf Beton) zwischen den Vermessungszeitpunkten aufgetreten sind, sich ausgebreitet haben oder intensiver geworden sind. Korrosion erscheint als charakteristische Verfärbung — orange, braun oder rotbraun auf Stahloberflächen; rostfarbene Verfärbung auf Betonoberflächen — die in Bildern des sichtbaren Spektrums erkennbar ist. Die spektrale Signatur von Korrosion unterscheidet sich von den meisten anderen Oberflächenmerkmalen, was eine relativ robuste Erkennung ermöglicht.
Die Korrosionsindexberechnung wandelt RGB-Bilddaten in eine korrosionsempfindliche Metrik um. Übliche Indizes sind: das Rot/Grün-Verhältnis (korrodierte Bereiche haben eine höhere Rotreflexion relativ zu Grün); der Normalisierte Korrosionsindex NCI = (Rot - Grün) / (Rot + Grün); und der Rostindex RI = (2 × Rot - Grün - Blau) normalisiert durch die Intensität. Diese Indizes werden schwellenbasiert, um binäre Korrosionskarten in jedem Zeitpunkt zu erzeugen.
Die Korrosionsbedeckungsänderung ist die prozentuale Zunahme der korrosionsbetroffenen Fläche relativ zur Gesamtoberfläche. Für Stahlbrücken und -komponenten liegt die Änderungserkennungsschwelle typischerweise bei 1-2 % der Gesamtoberfläche für signifikantes Korrosionsfortschreiten. Für Betonoberflächen mit Verfärbungen werden kleinere Flächenschwellen verwendet (0,5-1 %), da Verfärbungen oft räumlich verteilter sind als Lochfraßkorrosion auf Stahl.
Die Korrosionsschweregradänderung kategorisiert das Korrosionsfortschreiten nach Schweregradstufen gemäß Normen wie ISO 4628-3 (Beschichtungsstoffe — Bewertung des Abbaus von Beschichtungen — Teil 3: Bewertung des Rostgrades) oder SSPC-VIS 2 (Standard zur Bewertung des Rostgrades auf lackierten Stahloberflächen). Die Änderungserkennung weist jedem Korrosionsfleck in jedem Zeitpunkt eine Schweregradstufe zu und markiert Flecken, die zwischen den Vermessungen auf eine höhere Schweregradstufe fortgeschritten sind. Die Schweregradstufen basieren auf dem Prozentsatz der sichtbaren Oberfläche, der von Rost betroffen ist: Ri0 (0 %), Ri1 (<0,05 %), Ri2 (0,05-0,5 %), Ri3 (0,5-1 %), Ri4 (1-5 %), Ri5 (>5 %) gemäß ISO 4628-3.
Der Cloud-to-Cloud (C2C) Abstand ist die einfachste Methode zum Vergleich zweier Punktwolken. Für jeden Punkt in der Referenzwolke wird der nächste Nachbar in der Zielwolke gefunden und der euklidische Abstand zwischen ihnen berechnet. Das Ergebnis ist ein punktweiser Abstandswert, der als farbcodierte Abstandskarte visualisiert werden kann, wobei Blau keine Veränderung (nahezu Nullabstand) und Rot große Veränderung anzeigt.
Die Vorteile von C2C sind die Recheneffizienz (O(n log n) mit kd-Baum-Beschleunigung) und die konzeptionelle Einfachheit. C2C hat jedoch grundlegende Einschränkungen für die Infrastruktur-Änderungserkennung. Erstens misst es den kürzesten Abstand zu einem beliebigen Punkt in der Zielwolke, nicht den Abstand in Richtung der Oberflächennormalen, was die Verformungsmagnitude auf geneigten Oberflächen erheblich unterschätzen kann. Zweitens ist C2C empfindlich gegenüber Punktdichteschwankungen zwischen Wolken — eine Wolke mit höherer Dichte zeigt systematisch kleinere Nächste-Nachbarn-Abstände, unabhängig von physikalischen Veränderungen. Drittens liefert C2C kein Konfidenzintervall für die Abstandsmessung, was es schwierig macht, echte Verformung von Messrauschen zu unterscheiden.
Aus diesen Gründen wird C2C am besten als schnelle Screening-Methode verwendet, um Regionen mit potenziellen Veränderungen zu identifizieren, gefolgt von einer strengeren Analyse dieser Regionen mit anspruchsvolleren Methoden. In der Praxis bietet C2C mit einer Schwelle vom 2- bis 3-fachen des Punktwolkenrauschpegels einen konservativen Änderungserkennungs-Screen, der die meisten signifikanten Veränderungen erfasst und gleichzeitig Falschpositive durch Rauschen und Dichteschwankungen minimiert.
M3C2 ist der aktuelle State-of-the-Art-Algorithmus für die Punktwolken-Änderungserkennung, entwickelt von Lague, Brodu und Leroux (2013) und weit verbreitet in der Geomorphologie und Infrastrukturüberwachung. M3C2 adressiert die Einschränkungen von C2C, indem es Abstände entlang der lokalen Oberflächennormalenrichtung in einer der Oberflächenrauheit angemessenen Skala mit statistisch robusten Konfidenzintervallen berechnet.
Der M3C2-Algorithmus funktioniert wie folgt:
Normalenvektorberechnung an jedem Punkt in der Referenzwolke durch Anpassen einer Ebene an die lokale Nachbarschaft. Der Nachbarschaftsradius (D/2) wird so gewählt, dass er dem Maßstab der analysierten Oberflächenmerkmale entspricht — kleinere Radien für feinskalige Merkmale wie Risse, größere Radien für breite Verformungsmuster. Für die Infrastrukturüberwachung reichen typische Radien von 10 cm für detaillierte Rissanalysen bis zu 1 m für die Gesamtverformungsbewertung.
Projektion und Abstandsberechnung entlang der Normalenrichtung. Für jeden Punkt in der Referenzwolke wird ein Zylinder mit Radius d (Projektionsskala) entlang des Normalenvektors ausgerichtet. Punkte sowohl aus der Referenz- als auch aus der Zielwolke, die innerhalb dieses Zylinders liegen, werden identifiziert. Der Abstand zwischen den beiden Punktsätzen entlang der Normalenrichtung wird als Differenz zwischen ihren mittleren Positionen entlang des Normalenvektors berechnet. Die Projektionsskala d wird typischerweise auf das 2- bis 5-fache des mittleren Punktabstands gesetzt, um ausreichend Punkte für eine robuste Mittelwertberechnung zu gewährleisten.
Konfidenzintervallschätzung unter Verwendung der lokalen Punktwolkenrauheit und Punktanzahl. Der M3C2-Algorithmus berechnet ein 95 %-Konfidenzintervall (oder ein beliebiges angegebenes Konfidenzniveau) für die Abstandsmessung an jedem Punkt, basierend auf der Standardabweichung der Punkte innerhalb des Projektionszylinders und der Anzahl der Punkte. Änderungen, die kleiner als das Konfidenzintervall sind, sind statistisch nicht signifikant und sollten nicht als echte Verformung interpretiert werden. Diese integrierte statistische Qualitätskontrolle ist der Hauptvorteil von M3C2 gegenüber einfacheren Methoden.
Mehrskalenanalyse ermöglicht es dem Bediener, Änderungen auf mehreren räumlichen Skalen gleichzeitig zu analysieren. Die feinskalige Analyse (kleines D/2 und d) erkennt kleine Merkmale wie Rissöffnungen und Abplatzungsgrenzen. Die grobskalige Analyse (großes D/2 und d) erkennt breite Verformungen wie Brückendurchbiegung und differentielle Setzung. Der Vergleich von Ergebnissen über Skalen hinweg kann Oberflächenveränderung (Erosion, Ablagerung, Abplatzung) von Verformung (strukturelle Verschiebung, Neigung, Setzung) unterscheiden.
Für die Infrastrukturüberwachung erreicht M3C2 eine Erkennungsempfindlichkeit von 0,5-2 mm für terrestrische Laserscanner-Punktwolken mit Dichten über 500 Punkte/m². Für photogrammetrische Punktwolken (die typischerweise mehr Rauschen als TLS-Daten aufweisen) liegt die Erkennungsempfindlichkeit bei 2-5 mm, abhängig von Oberflächentextur, Bildqualität und Vermessungsgeometrie. Der Algorithmus ist in der Open-Source-Software CloudCompare implementiert und ist die Standardmethode für die Punktwolken-Änderungserkennung in Infrastrukturanwendungen weltweit.
| Punktwolken-Änderungserkennungsmethode | Typische Erkennungsschwelle | Konfidenzintervall | Beste Anwendung |
|---|---|---|---|
| C2C (Cloud-to-Cloud) | 2-5 mm | Nicht verfügbar | Schnellscreening, Erkennung großer Veränderungen |
| C2M (Cloud-to-Mesh) | 1-3 mm | Teilweise | Verformungsanalyse gegen Referenzoberfläche |
| M3C2 | 0,5-2 mm (TLS), 2-5 mm (Foto) | Ja (benutzerdefiniert) | Quantitative Verformungsüberwachung, strenge Änderung |
| PCA auf Punktwolkenmerkmalen | 2-10 mm | Statistisch | Erkennung von Änderungsmustern, nicht nur Magnitude |
Das DOD vergleicht Digitale Höhenmodelle (DEMs) oder Digitale Oberflächenmodelle (DSMs), die in jedem Vermessungszeitpunkt aus Punktwolken erzeugt wurden. Die beiden DEMs werden subtrahiert, um ein Differenzraster zu erzeugen, bei dem jeder Pixelwert die Höhenänderung an dieser Stelle repräsentiert. DOD ist recheneffizient, da es auf regelmäßigen Gittern anstelle unstrukturierter Punktwolken operiert, und die Ergebnisse sind als Wärmekarten der Höhenänderung leicht zu visualisieren und zu interpretieren.
Die Genauigkeit des DOD hängt von der Qualität der DEM-Erzeugung ab — die Interpolation von unregelmäßigen Punktwolken zu regelmäßigen Gittern führt zusätzliche Unsicherheit ein. Das Erkennungsniveau (LoD) für DOD wird berechnet als LoD = t × √(σ_Basis² + σ_Folge²), wobei σ die Höhenunsicherheit jedes DEM und t der Student-t-Wert für das gewünschte Konfidenzniveau ist (typischerweise t = 1,96 für 95 % Konfidenz). DOD ist am besten geeignet für die Überwachung von Massenveränderungen — Materialverlust durch Erosion oder Abplatzung, Materialansammlung durch Sediment oder Schutt und großflächige Setzung oder Hebung. Es ist weniger geeignet für die feinskalige Schadenserkennung, bei der einzelne Riss- oder Abplatzungsdetails benötigt werden.
Das optimale Intervall zwischen Wiederholungsvermessungen für die Änderungserkennung hängt von der Verschlechterungsrate, der Kritikalität des Bauwerks, den behördlichen Anforderungen und der minimal erkennbaren Veränderung des Messsystems ab. Das grundlegende Prinzip ist, dass das Vermessungsintervall kurz genug sein sollte, damit die erwartete Verschlechterung über das Intervall die Erkennungsschwelle der Änderungsanalyse überschreitet, aber lang genug, dass die kumulativen Veränderungen betrieblich bedeutsam und wirtschaftlich gerechtfertigt sind.
Für Flughafenbefestigungen im Rahmen der ICAO-Annex-14-Compliance ist der typische Vermessungsrhythmus:
Jährliche Vermessungen für alle betrieblichen Befestigungen (Startbahnen, Rollbahnen, Vorfelder) im Rahmen der routinemäßigen Zustandsüberwachung. Jährliche Vermessungen etablieren die Basisverschlechterungsrate und identifizieren Bereiche, die häufigere Aufmerksamkeit erfordern. ICAO Annex 14, Abschnitt 10.2 fordert, dass “die Oberfläche von Befestigungen in regelmäßigen Abständen zu inspizieren ist” und dass “die Häufigkeit der Inspektionen durch die Art und das Volumen des Verkehrs sowie die vorherrschenden klimatischen Bedingungen zu bestimmen ist.”
Vierteljährliche Vermessungen für Befestigungen in schlechtem Zustand (PCI < 40) oder mit bekannter aktiver Verschlechterung. Die vierteljährliche Änderungserkennung verfolgt die Wirksamkeit von Zwischeninstandhaltungen und liefert eine Frühwarnung vor schneller Verschlechterung, die möglicherweise strukturelle Eingriffe erfordert.
Monatliche Vermessungen für Befestigungen, die wegen kritischer Schäden beobachtet werden — Risse in der Nähe von Befestigungskanten, die zu Abplatzungen führen könnten, Bereiche mit aktiver Setzung oder Befestigungsabschnitte, die hohen Belastungen ausgesetzt sind (z. B. Startbahnenden, an denen Flugzeuge wenden und hohe Drehmomente aufbringen).
Ereignisbezogene Vermessungen nach extremen Wetterereignissen (starke Regenfälle, Frost-Tau-Wechsel, extreme Hitze), nach ungewöhnlichen Belastungsereignissen (übergewichtige Luftfahrzeuge, harte Landungen) oder nach Instandhaltungsmaßnahmen zur Überprüfung der Wirksamkeit.
Für Brückenbauwerke werden die Inspektionsintervalle durch nationale Brückenprüfnormen geregelt (z. B. NBIS in den USA, DIN 1076 in Deutschland, BASt-Richtlinien in Europa). Routine-Sichtprüfungen erfolgen typischerweise zweijährlich, aber Änderungserkennungsvermessungen für bekannte Schäden können in unterschiedlichen Häufigkeiten durchgeführt werden:
Zweijährliche Vermessungen für Brücken in gutem Zustand ohne bekannte signifikante Schäden. Diese etablieren Basisverschlechterungsraten für den Vergleich mit zukünftigen Vermessungen.
Jährliche Vermessungen für Brücken mit bekannten, zu beobachtenden Schäden — Risse in kritischen Bauteilen, Korrosion in Stahlkomponenten, Kolkgefährdung oder Bewegung an Lagern.
Vierteljährliche bis halbjährliche Vermessungen für Brücken mit aktiver, auf Fortschreiten zu überwachender Verschlechterung, nach Reparatur zur Überprüfung oder für Brücken mit einer verbleibenden Nutzungsdauer von unter 5 Jahren.
Zuverlässige Änderungserkennung über wiederholte Vermessungen hinweg erfordert eine sorgfältige Kontrolle der Datenerfassungsparameter, um nichtphysikalische Unterschiede zwischen den Zeitpunkten zu minimieren. Wichtige Konsistenzanforderungen sind:
Bodenauflösungsvermögen (GSD) sollte innerhalb von 10-20 % über die Vermessungen hinweg konsistent sein. Signifikante Änderungen des GSD verändern die räumliche Auflösung, mit der Schäden gemessen werden, und können scheinbare Veränderungen einführen, die reine Artefakte von Auflösungsunterschieden sind. GSD-Konsistenz wird durch Fliegen in derselben Höhe mit demselben Kamerasensor über alle Vermessungszeitpunkte hinweg erreicht.
Beleuchtungsbedingungen sollten so konsistent wie möglich sein. Vermessungen bei direktem Sonnenlicht erzeugen starke Schatten von Rissen und Oberflächentextur, die sich von Vermessungen bei bedecktem Licht unterscheiden. Die empfohlene Vorgehensweise ist, alle Wiederholungsvermessungen unter ähnlichen Lichtbedingungen durchzuführen — vorzugsweise bedeckt mit diffuser Beleuchtung, was Schatten minimiert und das gleichmäßigste Oberflächenerscheinungsbild für die Schadenserkennung bietet.
Oberflächenfeuchtigkeit sollte konsistent sein. Nasse Befestigungsoberflächen erscheinen signifikant anders als trockene Befestigungen — Risse füllen sich mit Wasser und werden weniger sichtbar, Oberflächenverfärbungen erscheinen dunkler und die Gesamtreflexion nimmt ab. Vermessungen sollten nur durchgeführt werden, wenn die Befestigungsoberfläche trocken ist (mindestens 48 Stunden seit dem letzten Regen für Beton, 24 Stunden für Asphalt).
Kamera- und Sensorparameter — Belichtungszeit, Blende, ISO, Fokusabstand — sollten konsistent sein. Automatische Belichtungseinstellungen (Auto-Belichtung, Auto-ISO) sollten zugunsten fester Einstellungen deaktiviert werden, die während der Vermessungsplanung festgelegt wurden, um eine konsistente Bildradiometrie über die Zeitpunkte hinweg sicherzustellen.
Flugpfad und Überlappung sollten demselben Missionsplan über alle Vermessungszeitpunkte hinweg folgen. Die Verwendung vorprogrammierter Flugpläne mit denselben Wegpunkten, Höhe, Geschwindigkeit und Überlappungseinstellungen gewährleistet eine konsistente Betrachtungsgeometrie, was die Registrierung vereinfacht und geometrische Unterschiede zwischen den Vermessungen reduziert.
Änderungserkennungsalarme übersetzen quantitative Änderungsmessungen in umsetzbare Benachrichtigungen für Infrastrukturmanager. Alarm-Schwellenwerte definieren die Magnitude der Veränderung, die eine Benachrichtigung auslöst, kategorisiert nach Schweregrad zur Unterstützung einer angemessenen Reaktionspriorisierung. Die Konfiguration der Schwellenwerte hängt von der Schadensart, der Kritikalität des Bauwerks und dem betrieblichen Kontext ab.
Für Risswachstumsalarme basieren die Schwellenwerte typischerweise auf der Rissbreitenzunahme:
Beobachtungsstufe — Rissbreitenzunahme von 0,3-0,5 mm zwischen Vermessungen. Zeigt mögliche aktive Rissbildung an. Kein sofortiges Handeln erforderlich, aber erhöhte Überwachungshäufigkeit empfohlen. Überprüfung durch Bodeninspektion beim nächsten geplanten Besuch.
Warnstufe — Rissbreitenzunahme von 0,5-1,5 mm zwischen Vermessungen. Zeigt bestätigte aktive Rissbildung an. Ingenieurtechnische Bewertung empfohlen, um die Ursache zu bestimmen und strukturelle Auswirkungen zu beurteilen. Planen Sie eine detaillierte Inspektion innerhalb von 30-60 Tagen.
Alarmstufe — Rissbreitenzunahme über 1,5 mm zwischen Vermessungen (oder eine einzelne Rissbreite über 5 mm gemäß den Schweregradrichtlinien von ASTM D5340). Zeigt schnell fortschreitende Verschlechterung an. Sofortige ingenieurtechnische Bewertung erforderlich. Belastung einschränken, wenn der Riss in einem kritischen Strukturelement liegt. Reparatur innerhalb von 30 Tagen planen.
Für Abplatzungswachstumsalarme basieren die Schwellenwerte auf der Flächenzunahme:
Beobachtungsstufe — Abplatzungsflächenzunahme von 10-25 % relativ zur Basis. Im nächsten Vermessungszyklus überwachen.
Warnstufe — Abplatzungsflächenzunahme von 25-50 % oder Abplatzungstiefe, die die Betondeckung überschreitet. Detaillierte Bewertung planen. Auf loses Material prüfen, das zu FOD (Fremdkörper) auf Flugplatzbefestigungen werden könnte.
Alarmstufe — Abplatzungsflächenzunahme über 50 % relativ zur Basis oder jede neue Abplatzung mit einer maximalen Ausdehnung von mehr als 25 cm auf Flugplatzbefestigungen (gemäß ICAO-Richtlinien für Fremdkörper). Sofortige Bodeninspektion erforderlich. Loses Material entfernen. Reparatur innerhalb von 7-14 Tagen planen.
Für Korrosionsausbreitungsalarme basieren die Schwellenwerte auf der Bedeckungs- und Schweregradkategorieänderung:
Beobachtungsstufe — Korrosionsbedeckungszunahme von 5-15 % der betroffenen Fläche oder Fortschreiten von Ri2 zu Ri3 gemäß ISO 4628-3. Bei der nächsten Vermessung überwachen.
Warnstufe — Korrosionsbedeckungszunahme von 15-30 % oder Fortschreiten von Ri3 zu Ri4. Ingenieurtechnische Bewertung des Beschichtungszustands und der Substratintegrität. Neubeschichtung innerhalb von 6-12 Monaten planen.
Alarmstufe — Korrosionsbedeckung über 30 % oder Fortschreiten zu Ri5. Sofortige Bewertung der Tragfähigkeit. Bei Stahlbrückenelementen Querschnittsverlustbewertung mittels Ultraschalldickenmessung. Eingriff innerhalb von 1-3 Monaten planen.
Effektive Änderungserkennungs-Alarmierung arbeitet auf mehreren kaskadierenden Ebenen, um zu vermeiden, dass Infrastrukturmanager mit Benachrichtigungen überflutet werden, während sichergestellt wird, dass kritische Änderungen nicht übersehen werden:
Stufe 1 — Statistischer Alarm wird ausgelöst, wenn die Änderungsmagnitude eine statistische Schwelle überschreitet, die aus dem Messrauschen abgeleitet wurde. Dies ist der Alarm auf der niedrigsten Ebene und zeigt an, dass die beobachtete Veränderung statistisch signifikant ist (das 95 %-Konfidenzintervall des Messsystems überschreitet). Viele Stufe-1-Alarme werden während der Routineüberwachung erwartet und erfordern keine sofortige Aufmerksamkeit.
Stufe 2 — Betriebsalarm wird ausgelöst, wenn die Änderungsmagnitude einen vordefinierten Schwellenwert überschreitet, der erfahrungsgemäß eine aktive, Aufmerksamkeit erfordernde Verschlechterung anzeigt. Betriebsalarme sind für jedes Bauwerk und jede Schadensart spezifisch und werden basierend auf historischen Verschlechterungsdaten und Instandhaltungsaufzeichnungen kalibriert.
Stufe 3 — Kritischer Alarm wird ausgelöst, wenn die Änderungsmagnitude ein unmittelbares Sicherheitsproblem anzeigt — schnelles Risswachstum in einem kritischen Strukturelement, plötzliche Setzung eines Brückenwiderlagers oder Abplatzungsentwicklung, die FOD auf einer aktiven Startbahn erzeugen könnte. Kritische Alarme erfordern eine sofortige Benachrichtigung des verantwortlichen Personals und eine beschleunigte Reaktion innerhalb von Stunden bis Tagen.
Das Alarmierungs-Framework sollte auch zeitliche Konsistenz berücksichtigen — Änderungen, die über mehrere Vermessungszeitpunkte hinweg bestehen bleiben oder zunehmen, erhalten eine höhere Priorität als isolierte Änderungen, die nicht fortschreiten. Ein Riss, der in einem Vermessungsintervall ein Wachstum von 0,4 mm zeigt, sich aber im nächsten stabilisiert, sollte von Warnung auf Beobachtung herabgestuft werden, während ein Riss, der in jeder von drei aufeinanderfolgenden Vermessungen ein konsistentes Wachstum von 0,3-0,5 mm zeigt, hochgestuft werden sollte.
Änderungserkennungsdaten liefern die empirische Grundlage für Verschlechterungsmodelle, die zukünftige Zustandsstufen und die verbleibende Nutzungsdauer vorhersagen. Die Integration der Änderungserkennung mit der Verschlechterungsmodellierung transformiert reaktive Instandhaltung — Behebung von Schäden, wenn sie einen kritischen Zustand erreichen — in proaktive, zustandsbasierte Instandhaltungsplanung, bei der Eingriffe basierend auf vorhergesagten Verschlechterungsverläufen geplant werden.
Empirische Verschlechterungskurven werden durch Auftragen von Änderungserkennungsergebnissen über mehrere Vermessungszeitpunkte entwickelt. Für jede Schadensart und jedes Strukturelement wird die Änderungsrate (Rissbreitenwachstum in mm/Jahr, Abplatzungsflächenwachstum in cm²/Jahr, Korrosionsbedeckungszunahme in %/Jahr) aus der Zeitreihe der Vermessungsmessungen berechnet. Diese empirischen Raten werden dann verwendet, um zukünftige Zustandsstufen unter Annahme einer fortgesetzten Verschlechterung mit der beobachteten Rate zu prognostizieren. Für Flughafenbefestigungen wird die Befestigungszustandsindex (PCI)-Verschlechterungskurve typischerweise als exponentieller Abfall modelliert: PCI(t) = PCI_initial × exp(-k × t), wobei k die aus Änderungserkennungsmessungen über mehrere Vermessungszyklen abgeleitete Verschlechterungsratenkonstante ist.
Probabilistische Verschlechterungsmodelle berücksichtigen die Unsicherheit sowohl in der Messung als auch in der Vorhersage. Die Änderungserkennung liefert nicht nur die Änderungsmagnitude, sondern auch das Konfidenzintervall für diese Messung (aus M3C2 oder aus der statistischen Änderungsanalyse). Diese Unsicherheiten pflanzen sich in das Verschlechterungsmodell fort und erzeugen Konfidenzbänder für den vorhergesagten zukünftigen Zustand. Ein Markov-Ketten-Modell beispielsweise verwendet die Änderungserkennungsdaten, um Übergangswahrscheinlichkeiten zwischen Zustandsstufen zu schätzen, mit Konfidenzintervallen, die die Messunsicherheit zu jedem Zeitpunkt widerspiegeln.
Verschlechterungsvorhersage mit maschinellem Lernen verwendet die zeitliche Abfolge von Änderungserkennungsmessungen als Merkmale zur Vorhersage des zukünftigen Zustands. Recurrent Neural Networks (RNNs) und Long Short-Term Memory (LSTM)-Netzwerke sind besonders für diese Aufgabe geeignet, da sie zeitliche Muster direkt aus der Abfolge der Vermessungsmessungen lernen. Eingabemerkmale umfassen Rissbreiten-Zeitreihen, Abplatzungsflächen-Zeitreihen, PCI-Werte und Umwelt-Kovariablen (Temperaturzyklen, Niederschlag, Frost-Tau-Ereignisse). Die Modellausgaben sind vorhergesagte Zustände zu zukünftigen Zeitpunkten mit zugehörigen Vorhersageintervallen.
Die Änderungserkennung ermöglicht auch die quantitative Bewertung der Instandhaltungswirksamkeit durch Vorher-Nachher-Vergleiche. Wenn ein Schaden repariert wird — Riss versiegelt, Abplatzung ausgebessert, Korrosion behandelt — überprüft die Änderungserkennungsanalyse zwischen der Vor-Reparatur-Vermessung und der ersten Nach-Reparatur-Vermessung, dass der Schaden nicht mehr vorhanden ist. Nachfolgende Vermessungen verfolgen, ob die Reparatur wirksam bleibt oder ob der Schaden wieder auftritt.
Die Reparaturhaltbarkeitsverfolgung über mehrere Vermessungszyklen liefert Daten zur mittleren Zeit bis zum Wiederauftreten von Schäden nach verschiedenen Reparaturmethoden. Diese Daten informieren die Instandhaltungsplanung, indem sie die haltbarsten Reparaturstrategien für jede Schadensart unter spezifischen Umwelt- und Belastungsbedingungen identifizieren. Wenn die Änderungserkennung beispielsweise zeigt, dass die Rissversiegelung auf einem bestimmten Startbahnabschnitt eine mittlere Wiederkehrzeit von 18 Monaten hat, während Fräsen und Versiegeln eine mittlere Wiederkehrzeit von 36 Monaten hat, sind die höheren Anfangskosten des Fräsens und Versiegelns durch die verlängerte Nutzungsdauer gerechtfertigt.
Die leistungsbasierte Instandhaltungsvergabe verwendet Änderungserkennungsdaten, um zu überprüfen, ob Instandhaltungsunternehmen bestimmte Leistungsergebnisse erzielt haben. Ein Vertrag kann spezifizieren, dass die Rissbreite in behandelten Bereichen mindestens 24 Monate lang 125 % der Nach-Reparatur-Breite nicht überschreiten darf. Änderungserkennungsvermessungen 6, 12 und 24 Monate nach der Reparatur liefern eine objektive Überprüfung der Einhaltung, wobei die Zahlung an die nachgewiesene Leistung gebunden ist, nicht nur an die Durchführung der Arbeiten.
CloudCompare ist die primäre Open-Source-Software für die Punktwolken-Änderungserkennung und implementiert M3C2-, C2C-, C2M- (Cloud-to-Mesh) und DOD-Methoden. Es unterstützt LAS, LAZ, PLY und andere gängige Punktwolkenformate, bietet Stapelverarbeitung für automatisierte Pipelines und enthält Visualisierungswerkzeuge für farbcodierte Änderungskarten. CloudCompare läuft unter Windows, macOS und Linux und ist der De-facto-Standard für die Punktwolken-Änderungsanalyse in der Infrastrukturüberwachung.
Agisoft Metashape unterstützt Orthomosaik- und DEM-Vergleich für die Änderungserkennung durch seinen Workflow zur Differenzberechnung zwischen verarbeiteten Projekten. Die Software bietet eine automatisierte Bildregistrierung über Vermessungen hinweg unter Verwendung des gemeinsamen GCP-Netzwerks, und die resultierenden Orthomosaiken können pixelweise oder über das integrierte DEM-Differenzierungswerkzeug verglichen werden. Die Python-API von Metashape ermöglicht die Skripterstellung von Änderungserkennungs-Workflows für die Stapelverarbeitung mehrerer Vermessungspaare.
Pix4Dmapper und Pix4Dmatic enthalten Orthomosaik- und DSM-Vergleichsfunktionen mit automatisierten Änderungserkennungsberichten, die Bereiche mit signifikanten Höhenunterschieden hervorheben. Der Qualitätsbericht von Pix4D enthält pixelweise Genauigkeitsschätzungen, die die statistische Signifikanz erkannter Veränderungen belegen.
TarmacView bietet spezialisierte Änderungserkennung für Flughafenbefestigungsinfrastruktur und vergleicht Orthomosaiken und Risskarten über wiederholte Vermessungen hinweg mit automatischer Änderungsklassifizierung. Die Plattform verfolgt Risswachstum (Breite und Länge), Neubildung von Rissen, Abplatzungsflächenänderungen und PCI-Verschlechterungstrends. Änderungserkennungsergebnisse werden als Overlay-Karten auf dem aktuellen Orthomosaik visualisiert, mit farbcodiertem Änderungsschweregrad und automatischer Alarmgenerierung für Änderungen, die konfigurierbare Schwellenwerte überschreiten.
Die vollständige Automatisierung der Änderungserkennung erfordert eine integrierte Pipeline, die alle Verarbeitungsschritte von der Datenerfassung bis zur Berichterstellung abdeckt:
Schritt 1 — Datenerfassung: Importieren neuer Vermessungsdaten (Bilder, GNSS-Logs, GCP-Koordinaten) und Abrufen der entsprechenden Basisvermessungsdaten aus der Anlagendatenbank. Überprüfen, ob beide Vermessungen denselben Anlagenbereich abdecken und die Qualitätsanforderungen erfüllen.
Schritt 2 — Registrierung: Durchführen der automatisierten Registrierung des neuen Orthomosaiks oder der neuen Punktwolke auf die Basisreferenz. Für Orthomosaiken Verwendung der merkmalsbasierten Registrierung mit SIFT- oder AKAZE-Merkmalen, gefolgt von intensitätsbasierter Feinregistrierung. Für Punktwolken Anwendung einer groben Registrierung mit GCPs oder ICP (Iterative Closest Point), gefolgt von Feinregistrierung.
Schritt 3 — Änderungsberechnung: Anwendung der ausgewählten Änderungserkennungsmethode — Bilddifferenzierung für Intensitätsänderungen, M3C2 für Punktwolkenverformung, objektbasierter Vergleich für Riss- und Abplatzungsänderungen. Berechnung von Änderungsstatistiken mit Konfidenzintervallen.
Schritt 4 — Klassifizierung: Klassifizierung erkannter Änderungen nach Typ (Risswachstum, neuer Riss, Abplatzungsausbreitung, Korrosion, Verformung), Schweregrad und räumlicher Lage. Zuordnung jedes Änderungsobjekts zu seiner entsprechenden Anlagenkomponente.
Schritt 5 — Alarmgenerierung: Vergleich der Änderungsmagnituden mit konfigurierten Schwellenwerten für jede Schadensart und Position. Generierung von Stufe-1-, Stufe-2- oder Stufe-3-Alarmen nach Bedarf. Aufzeichnung der Alarme im Anlagenverwaltungssystem mit räumlichem Bezug, Änderungsmagnitude, Konfidenzintervall und Zeitstempel.
Schritt 6 — Berichterstellung: Erstellung von Änderungserkennungsberichten, die Änderungskarten (Overlay auf aktuellem Orthomosaik), zusammenfassende Statistiken (Gesamtrislängenänderung, Anzahl neuer Schäden, PCI-Trend), detaillierte schadensspezifische Änderungsdaten (Rissbreitenverlauf, Abplatzungsflächenverlauf) und empfohlene Maßnahmen basierend auf Alarmstufen enthalten.
Schritt 7 — Datenbankaktualisierung: Aktualisierung der Anlagenzustandsdatenbank mit neuen Änderungserkennungsergebnissen. Anhängen von Zeitreihendaten für jeden Schaden und jedes Anlagenelement. Aktualisierung von Verschlechterungskurven mit dem neuen Messpunkt. Neuberechnung des vorhergesagten Zustands und der verbleibenden Nutzungsdauer, wenn Verschlechterungsmodelle integriert sind.
Die automatisierte Änderungserkennung erfordert eine systematische Qualitätssicherung, um sicherzustellen, dass die gemeldeten Änderungen real und keine Artefakte von Verarbeitungsfehlern sind:
Registrierungsqualitätsprüfung: Der Registrierungs-RMSE zwischen den Vermessungen muss unter dem Projektschwellenwert liegen (typischerweise 0,5 Pixel für Orthomosaiken, 0,5 cm für Punktwolken). Wenn die Registrierungsqualität unzureichend ist, werden die Änderungserkennungsergebnisse zur manuellen Überprüfung markiert.
Falschpositiv-Screening: Änderungserkennungsergebnisse werden gegen bekannte Nicht-Änderungsindikatoren geprüft: Bereiche mit stehendem Wasser (erkannt durch Nahinfrarot- oder Wärmebildaufnahmen), Bereiche mit kürzlicher Instandhaltung (aufgezeichnet im Anlagenverwaltungssystem) und Bereiche mit bekannter Oberflächenkontamination (Ölverschmutzungen, Gummiablagerungen auf Startbahnen).
Zeitliche Konsistenzprüfung: Änderungen, die in einem einzigen Vermessungsintervall auftreten, aber in nachfolgenden Vermessungen nicht bestätigt werden, werden als potenziell vorübergehend markiert — Oberflächenflecken, die abgewaschen werden, Feuchtigkeitsmuster, die mit dem Wetter variieren, oder Schmutz, der entfernt wird. Beständige Änderungen erhalten höhere Vertrauensbewertungen.
Manuelle Überprüfungsstichprobe: Eine statistisch valide Stichprobe erkannter Änderungen wird für jeden Vermessungszyklus von einem qualifizierten Prüfer überprüft. Die Stichprobengröße wird berechnet, um 95 % Konfidenz zu erreichen, dass die Falschpositivrate des automatisierten Systems unter dem akzeptablen Schwellenwert liegt (typischerweise 5-10 % für Beobachtungsalarme, 1-2 % für Alarmalarme).
Die Änderungserkennung wandelt die Infrastrukturinspektion von einer statischen Zustandsmomentaufnahme in eine dynamische zeitliche Aufzeichnung von Verschlechterung, Reparatur und strukturellem Verhalten um. Durch die präzise Coregistrierung von Bildern und Punktwolken aus wiederholten Vermessungen quantifiziert die Änderungserkennung die subtile, millimetergenaue Progression von Rissen, Abplatzungen, Korrosion und Verformung, die in einer einzelnen Inspektion unsichtbar wäre, aber im Laufe der Zeit die Nutzungsdauer des Bauwerks bestimmt.
Die Methodik integriert eine strenge geometrische Registrierung — merkmalsbasiert, intensitätsbasiert oder georeferenziert mittels GCPs — mit einer statistischen Änderungsanalyse, die echte Verschlechterung von Messrauschen trennt. Die Auswahl der Änderungserkennungsmethode hängt von der Schadensart und der erforderlichen Empfindlichkeit ab: Bilddifferenzierung für Veränderungen des Oberflächenerscheinungsbildes, M3C2 für Punktwolkenverformung, objektbasierter Vergleich für Riss- und Abplatzungsgeometrieänderungen und Methoden des maschinellen Lernens für die automatisierte Klassifizierung mit hoher Genauigkeit.
Für Flughafenbefestigungen, Brücken und kritische Infrastruktur liefert die Änderungserkennung die Datengrundlage für zustandsbasierte Instandhaltung, Verschlechterungsmodellierung und risikoinformierte Budgetzuweisung. Sie ermöglicht es Infrastrukturmanagern, beschleunigende Verschlechterung zu identifizieren, bevor sie kritische Werte erreicht, die Wirksamkeit von Instandhaltungsmaßnahmen zu überprüfen und den Zeitpunkt und Umfang von Reparaturmaßnahmen zu optimieren. Die Integration der Änderungserkennung mit automatisierten Verarbeitungspipelines, Alarmierungs-Frameworks und Verschlechterungsmodellen schafft ein geschlossenes Zustandsmanagementsystem, das die Qualität von Instandhaltungsentscheidungen durch empirische Belege von Verschlechterungsraten und Reparaturhaltbarkeit kontinuierlich verbessert.
TarmacView implementiert die Änderungserkennung als Kernfunktion seiner Plattform für die Inspektion von Flughafenbefestigungen und ermöglicht die automatisierte Verfolgung von Risswachstum, Abplatzungsausbreitung und Zustandstrends über aufeinanderfolgende Drohnenvermessungen hinweg. Die Plattform wendet eine strenge Registrierung und statistische Qualitätskontrolle an, um sicherzustellen, dass gemeldete Änderungen real und handlungsrelevant sind, und liefert Infrastrukturmanagern quantitative Nachweise für die Instandhaltungsplanung und Compliance-Berichterstattung gemäß ICAO Annex 14 und ASTM D5340.
TarmacView ermöglicht die automatisierte Änderungserkennung über wiederholte Drohnenvermessungen von Flughafenbefestigungen, Brücken und Infrastruktur hinweg. Verfolgen Sie Risswachstum, Abplatzungsvergrößerung und Verschlechterungstrends mit quantitativer Präzision. Erkennen Sie Veränderungen frühzeitig und optimieren Sie die Instandhaltungsplanung.
Risssegmentierung ist die Computer-Vision-Aufgabe, jedes Pixel eines Bildes entweder als Riss oder als Nicht-Riss zu klassifizieren und eine binäre Maske zu erz...
Die KI-basierte Risserkennung nutzt Computer Vision – Convolutional Neural Networks, Vision Transformer und semantische Segmentierungsmodelle – um Risse in Fahr...
Instanzsegmentierung erkennt und grenzt jedes einzelne Objekt oder jede Schadensinstanz auf Pixelebene ab und weist jedem Riss, Abplatzung oder Schlagloch eine ...