Drohnen-Flugplanung für die Infrastrukturinspektion
Die Drohnen-Flugplanung für die Infrastrukturinspektion umfasst die Gestaltung automatisierter Flugpfade (Waypoint-Missionen) mit geeigneter Höhe, Geschwindigke...
23 Min. Lesezeit
Drone
UAV
+8
Bildüberlappung (Vorwärtsüberlappung und Seitenüberlappung) ist der Prozentsatz der Bildfläche, der zwischen aufeinanderfolgenden und benachbarten Fotos in einer photogrammetrischen Vermessung geteilt wird. Typische Anforderungen sind 75-80 % Vorwärtsüberlappung und 60-70 % Seitenüberlappung für Infrastrukturkartierung und -inspektion.
Bildüberlappung ist der Prozentsatz der gesamten Bildfläche, der zwischen zwei oder mehr aufeinanderfolgenden Luftbildern geteilt wird. Sie ist der mit Abstand wichtigste Aufnahmeparameter in der Photogrammetrie und bestimmt direkt, ob die automatisierte 3D-Rekonstruktion gelingt oder scheitert. Ohne ausreichende Überlappung können Structure-from-Motion (SfM)-Algorithmen keine zuverlässigen Verknüpfungspunkte zwischen Bildern finden, Kamerapositionen nicht trianguliert werden und die resultierende Punktwolke oder das Orthomosaik weist Lücken, Verzerrungen und Messfehler auf.
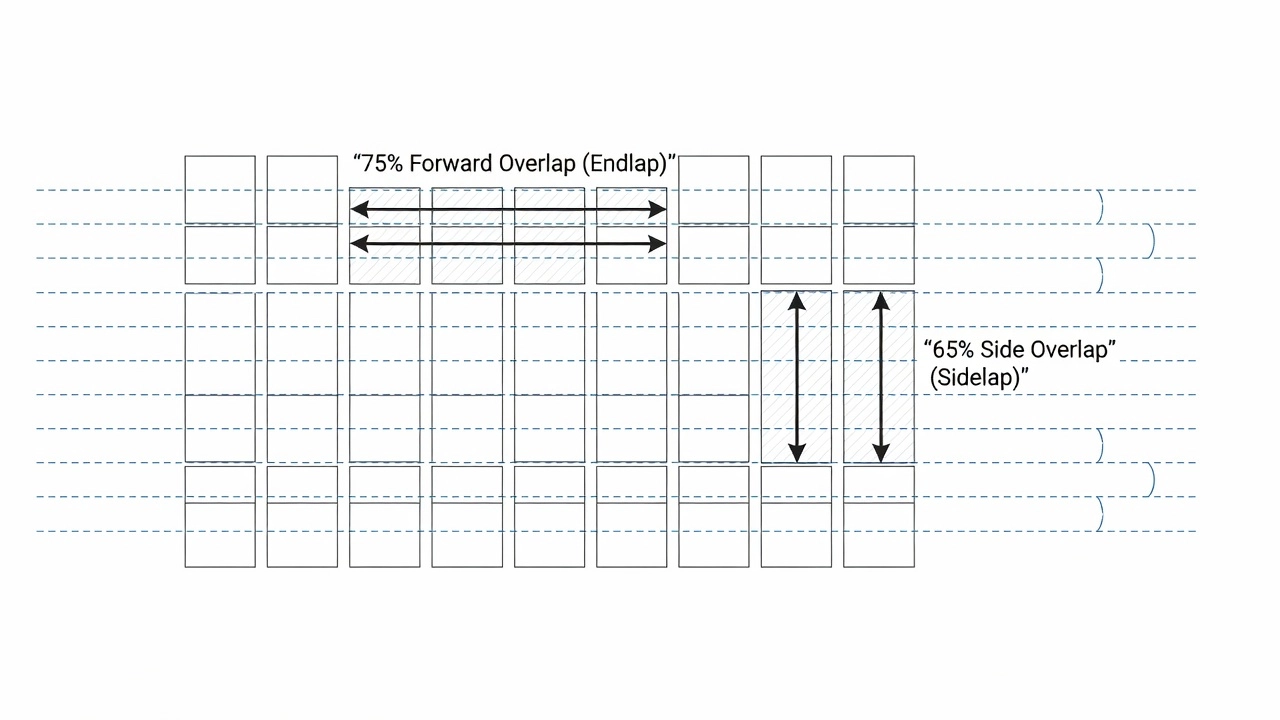
Die Überlappung wird durch zwei unabhängige Parameter ausgedrückt: Vorwärtsüberlappung (auch Endlap oder Längsüberlappung genannt), die die Überlappung zwischen aufeinanderfolgenden Bildern entlang der Flugrichtung ist, und Seitenüberlappung (auch Sidelap, laterale Überlappung oder Querüberlappung genannt), die die Überlappung zwischen Bildern benachbarter, nebeneinander geflogener Fluglinien ist. Beide Parameter müssen in der Missionsplanungssoftware unabhängig konfiguriert werden und werden von Flughöhe, Kamerasensorgeometrie, Grundgeschwindigkeit und dem Kameraauslöseintervall beeinflusst.
Das mathematische Prinzip der Bildüberlappung ist die photogrammetrische Anforderung, dass jeder Punkt am Boden in mindestens zwei, idealerweise drei oder mehr Bildern von verschiedenen Kamerapositionen sichtbar sein muss. Diese Multi-View-Geometrie ermöglicht die Epipolarlinien-Triangulation – den Kern der automatisierten Photogrammetrie – bei der die 3D-Koordinaten eines beliebigen Punktes berechnet werden, indem die entsprechende Pixelposition in mehreren überlappenden Bildern gefunden und die Schnittpunkte der Strahllinien von jeder Kameraposition durch dieses Pixel gelöst werden.
Vorwärtsüberlappung ist der Prozentsatz der Bildfläche, der zwischen zwei aufeinanderfolgenden, entlang einer einzelnen Fluglinie aufgenommenen Fotos geteilt wird. Sie wird als Prozentsatz der Längsbildabmessung (der Abmessung des Bildfußabdrucks in Flugrichtung) ausgedrückt. Wenn aufeinanderfolgende Bilder 80 % ihrer Längsfläche teilen, beträgt die Vorwärtsüberlappung 80 %.
Die Vorwärtsüberlappung bestimmt, wie oft ein bestimmter Bodenpunkt entlang der Flugbahn abgebildet wird. Bei 80 % Vorwärtsüberlappung erscheint jeder Bodenpunkt in jedem Bild, dessen Position diesen Punkt abdeckt – typischerweise 5 bis 7 Bilder für eine einzelne Fluglinie. Diese Mehrfachabdeckung ist für eine zuverlässige Verknüpfungspunktzuordnung unerlässlich: Die SfM-Pipeline benötigt mindestens drei Beobachtungen jedes Verknüpfungspunktes, um die Kameraposition und -ausrichtung genau zu bestimmen, und zusätzliche Beobachtungen verbessern die Redundanz, die die Genauigkeit steigert.
Die Vorwärtsüberlappung wird in der traditionellen photogrammetrischen Literatur auch als Endlap bezeichnet. Der Begriff “Endlap” stammt aus der Ära der analogen Luftbildfilmkameras auf bemannten Flugzeugen, bei denen der Filmstreifen eines einzelnen Flugdurchgangs für die stereoskopische Betrachtung Ende-an-Ende physisch überlappt wurde. Der Begriff besteht in der modernen digitalen Photogrammetrie fort, obwohl “Vorwärtsüberlappung” und “Längsüberlappung” für Drohneneinsätze beschreibender sind.
Die Berechnung der Vorwärtsüberlappung hängt von drei Parametern ab: der Bodenfußabdruckabmessung des Bildes in Flugrichtung, der Fluggeschwindigkeit über Grund und dem Kameraauslöseintervall. Für jeden gegebenen Bildfußabdruck (bestimmt durch Flughöhe und Kameragesichtsfeld) bestimmt die gewünschte Vorwärtsüberlappung den maximal zulässigen Abstand zwischen aufeinanderfolgenden Kamerapositionen:
D_max = L × (1 — O_f / 100)
Wobei D_max der maximale Abstand zwischen aufeinanderfolgenden Aufnahmestandorten ist, L die Länge des Bildfußabdrucks entlang der Flugrichtung und O_f der gewünschte Prozentsatz der Vorwärtsüberlappung. Bei einem Bildfußabdruck von 100 m in Längsrichtung und einer gewünschten Vorwärtsüberlappung von 80 % muss die Kamera alle 20 m Vorwärtsbewegung auslösen.
Seitenüberlappung ist der Prozentsatz der Bildfläche, der zwischen Bildern benachbarter Fluglinien geteilt wird. Sie wird als Prozentsatz der Querbildabmessung (der Abmessung des Bildfußabdrucks senkrecht zur Flugrichtung) ausgedrückt. Wenn die Bilder zweier benachbarter Fluglinien 65 % ihrer lateralen Fläche teilen, beträgt die Seitenüberlappung 65 %.
Die Seitenüberlappung wird auch Sidelap, laterale Überlappung oder Querüberlappung genannt. In der traditionellen Photogrammetrie war Sidelap die Überlappung zwischen benachbarten Filmstreifen in einem Kartierungsblock. Bei Drohneneinsätzen ist die Seitenüberlappung die Überlappung zwischen zwei parallelen Fluglinien in einer Rastermission.
Die Seitenüberlappung bestimmt, ob es Lücken in der Abdeckung zwischen benachbarten Fluglinien gibt. Bei 60 % Seitenüberlappung überlappen die Ränder der effektiven Abdeckung einer Fluglinie die der nächsten um 60 % der Querbildabmessung, was eine durchgehende Abdeckung über die gesamte Breite des Vermessungsgebiets gewährleistet. Unterhalb von 30 % Seitenüberlappung wird die Abdeckung zwischen den Fluglinien diskontinuierlich, was echte Lücken in der Bilddaten erzeugt, in denen keine Daten existieren.
Der Abstand zwischen den Fluglinien wird aus der Seitenüberlappungsanforderung berechnet:
S = W × (1 — O_s / 100)
Wobei S der Abstand zwischen benachbarten Fluglinien ist, W die Breite des Bildfußabdrucks quer zur Flugrichtung und O_s der gewünschte Prozentsatz der Seitenüberlappung. Bei einem Bildfußabdruck von 150 m quer zur Flugrichtung und einer gewünschten Seitenüberlappung von 65 % müssen die Fluglinien 52,5 m voneinander entfernt sein.
| Parameter | Vorwärtsüberlappung (Endlap) | Seitenüberlappung (Sidelap) |
|---|---|---|
| Richtung | Entlang des Flugpfades | Zwischen benachbarten Fluglinien |
| Typischer Wert | 75-85 % | 60-75 % |
| Minimum für Zuverlässigkeit | 70 % | 30 % |
| Auswirkung auf Flugzeit | Höhere Überlappung = mehr Bilder pro Fluglinie | Höhere Überlappung = mehr Fluglinien |
| Primäre Wirkung | Stellt Abdeckung entlang jedes Flugstreifens sicher | Stellt Abdeckung über die Vermessungsbreite sicher |
| Schlüsselvariablen | Fluggeschwindigkeit, Auslöseintervall, Höhe | Fluglinienabstand, Höhe, Sensorbreite |
Structure from Motion (SfM) ist die Rechenmaschine, die die moderne digitale Photogrammetrie antreibt. SfM-Algorithmen verarbeiten überlappende 2D-Bilder, um gleichzeitig Kamerapositionen, Kameraausrichtungen und die 3D-Geometrie der Szene zu rekonstruieren. Bildüberlappung ist die grundlegende Voraussetzung, ohne die SfM nicht funktionieren kann.
Die SfM-Pipeline beginnt mit der Merkmalserkennung – Algorithmen wie SIFT (Scale-Invariant Feature Transform), SURF (Speeded-Up Robust Features) oder AKAZE identifizieren markante Punkte in jedem Bild, wie Ecken, Kanten und Texturbereiche. Diese Merkmale müssen robust sein, d. h. sie müssen unabhängig von Beleuchtungsänderungen, Größenunterschieden und kleinen Perspektivverschiebungen zwischen Bildern zuverlässig erkannt werden können. Die Dichte und Erkennbarkeit dieser Merkmale hängt von der Oberflächentextur ab – Gras, Kies und Fahrbahnmarkierungen erzeugen reichhaltige Merkmale, während gleichmäßiger Asphalt, Schneedecken und Wasseroberflächen sehr wenige Merkmale liefern.
Die nächste Stufe ist die Merkmalszuordnung, bei der die Software korrespondierende Merkmale über Bildpaare hinweg findet. Hier ist die Überlappung entscheidend: Wenn sich zwei Bilder nicht überlappen, teilen sie keine Bodenfläche, sodass keine Merkmale zwischen ihnen zugeordnet werden können. Selbst wenn sich Bilder überlappen, hängt die Erfolgsrate der Zuordnung vom Prozentsatz der Überlappung ab. Die Forschung zeigt, dass die Erfolgsraten der Merkmalszuordnung unterhalb von 60 % Vorwärtsüberlappung drastisch sinken. Bei 80 % Überlappung liegen typische Zuordnungsraten zwischen benachbarten Bildern bei 1000-5000 Verknüpfungspunkten pro Bildpaar. Bei 50 % Überlappung sinkt dies auf 100-500 Verknüpfungspunkte, und unterhalb von 40 % scheitert die zuverlässige Zuordnung oft vollständig.
Die dritte Stufe ist die Kameraposenschätzung mittels Bündelausgleich. Die Software löst die Position (X, Y, Z) und Ausrichtung (Roll, Nick, Gier) jeder Kamera zum Zeitpunkt der Belichtung sowie die 3D-Koordinaten jedes zugeordneten Verknüpfungspunktes. Dies ist ein nichtlineares Optimierungsproblem der kleinsten Quadrate, und die Qualität der Lösung hängt entscheidend von zwei Faktoren ab: der Anzahl der Bilder, in denen jeder Verknüpfungspunkt erscheint, und der geometrischen Konfiguration dieser Bilder.
Die Faustregel in der Photogrammetrie lautet, dass jeder Bodenpunkt für eine zuverlässige Rekonstruktion in mindestens drei Bildern erscheinen sollte. Bei 80 % Vorwärtsüberlappung und 65 % Seitenüberlappung erscheint jeder Punkt im zentralen Bereich einer Rastervermessung in 6-12 Bildern, was starke geometrische Randbedingungen liefert. Ein Rückgang auf 60 % Vorwärtsüberlappung und 40 % Seitenüberlappung reduziert dies auf 3-5 Bilder pro Punkt, wobei Punkte nahe der Vermessungsgrenzen nur in 2-3 Bildern erscheinen – der Mindestschwelle für Zuverlässigkeit.

Multi-View Stereo (MVS) – die dichte Zuordnungsstufe, die auf SfM folgt – ist noch empfindlicher gegenüber Überlappung. Während SfM nur spärliche Merkmale zuordnen muss, versucht MVS, für jedes Pixel eine Tiefenschätzung zu erzeugen, wodurch eine dichte Punktwolke mit Millionen von Punkten entsteht. MVS-Algorithmen bewerten die photometrische Konsistenz kleiner Bildausschnitte über mehrere Ansichten hinweg, und die Qualität dieser Tiefenschätzungen verbessert sich mit der Anzahl der überlappenden Ansichten. Bereiche, die von nur 2-3 Kameras abgebildet werden, zeigen verrauschte, unvollständige Tiefenkarten, während Bereiche, die von 5+ Kameras abgebildet werden, saubere, vollständige Rekonstruktionen erzeugen.
Die Standardüberlappungsanforderungen für die Drohnenphotogrammetrie wurden durch jahrzehntelange photogrammetrische Praxis etabliert und durch umfangreiche wissenschaftliche Forschung validiert. Die folgenden Werte stellen allgemeine Empfehlungen dar, die für die meisten Vermessungsszenarien gelten.
Für die Orthomosaik-Generierung – zur Erstellung einer nahtlosen, geometrisch korrigierten Luftbildkarte – beträgt die minimale Vorwärtsüberlappung 60 % und die minimale Seitenüberlappung 30 %. Dies sind die absoluten Untergrenzen, unterhalb derer die Photogrammetrie-Software kein durchgehendes Orthomosaik ohne sichtbare Nähte oder Lücken erstellen kann. Die meisten Praktiker empfehlen jedoch 75-85 % Vorwärtsüberlappung und 60-70 % Seitenüberlappung für professionelle Orthomosaike. Die höheren Werte liefern die Redundanz, die für eine genaue Orthorektifizierung erforderlich ist, bei der die Position jedes Pixels basierend auf Geländehöhe und Kameraperspektive korrigiert wird.
Für die 3D-Punktwolken-Generierung – zur Erstellung eines detaillierten, messbaren 3D-Modells der Oberfläche – sind die Anforderungen strenger. Vorwärtsüberlappung von 75-85 % und Seitenüberlappung von 60-75 % sind Standard. Die zusätzliche Überlappung stellt sicher, dass jeder Bodenpunkt von mindestens 5-8 verschiedenen Kamerapositionen abgebildet wird, was die geometrische Vielfalt liefert, die für eine genaue Tiefenschätzung in der dichten Zuordnungsstufe erforderlich ist.
Für hochgenaue Vermessungen – bei denen Messgenauigkeiten von 1-3 cm erforderlich sind – werden Vorwärtsüberlappung von 80-85 % und Seitenüberlappung von 70-80 % empfohlen. Bei diesen Überlappungsniveaus hat das photogrammetrische Netzwerk ausreichend Redundanz, um GPS-Positionsfehler, windbedingte Kameraneigungen und andere Unsicherheitsquellen auszugleichen. Wissenschaftliche Forschung, veröffentlicht in Remote Sensing, zeigt durchgängig, dass eine Erhöhung der Überlappung von 70 % auf 80 % die vertikale Genauigkeit um 25-40 % verbessert, während eine Erhöhung über 85 % hinaus abnehmende Erträge zeigt.
Für die Infrastrukturinspektion – Brückendecks, Fahrbahnoberflächen, Startbahnzustandsbewertung – sind Vorwärtsüberlappung von 80-85 % und Seitenüberlappung von 70-80 % Standard. Die höhere Überlappung stellt sicher, dass kleine Oberflächendefekte (Risse, Abplatzungen, Fugenversagen) in mehreren Bildern aus mehreren Winkeln sichtbar sind, was die Erkennungsraten und die Messgenauigkeit verbessert.
| Anwendung | Vorwärtsüberlappung | Seitenüberlappung | Begründung |
|---|---|---|---|
| Orthomosaik | 75-80 % | 60-65 % | Nahtlose Kartenerstellung |
| 3D-Modell (Standard) | 75-80 % | 60-70 % | Vollständige Oberflächenrekonstruktion |
| Hochgenaue Vermessung | 80-85 % | 70-80 % | Subzentimeter-Genauigkeit |
| Fahrbahninspektion | 80-85 % | 70-75 % | Risserkennung bei 0,3 mm |
| Brückendeckinspektion | 80-85 % | 70-80 % | Identifikation struktureller Defekte |
| Urbane Kartierung | 85-90 % | 70-80 % | Gebäuderekonstruktion |
| Landwirtschaft/NDVI | 70-75 % | 55-65 % | Effiziente Feldabdeckung |
| Großflächenkartierung | 70-75 % | 55-60 % | Abwägung von Abdeckung und Flugzeit |
Das Unterschreiten der empfohlenen Überlappungsschwellen erzeugt eine Kaskade negativer Effekte, die das photogrammetrische Ergebnis verschlechtern oder zerstören.
Rekonstruktionslücken – das offensichtlichste Symptom unzureichender Überlappung. Wenn zwei benachbarte Bilder nicht genügend Bodenfläche teilen, kann der SfM-Algorithmus keine Verknüpfungspunkte zwischen ihnen finden, und die Rekonstruktion dieses Bereichs scheitert vollständig. In der endgültigen Punktwolke oder im Orthomosaik erscheinen diese Lücken als Löcher oder fehlende Daten. In schweren Fällen gelingt es dem gesamten Bildblock nicht, sich zu einem einzigen kohärenten Modell zusammenzufügen, und fragmentiert in getrennte Cluster.
Fehlgeschlagene Verknüpfungspunktzuordnung – tritt auf, wenn der Überlappungsbereich zwischen zwei Bildern zu klein ist, um ausreichend markante Merkmale zu enthalten. Auf gleichmäßigen Oberflächen wie Asphalt oder Beton können selbst 60 % Überlappung nicht genügend Zuordnungspunkte liefern, da der Oberfläche die Textur fehlt. Auf solchen Oberflächen können 80 % oder mehr Überlappung erforderlich sein, um genügend Merkmale für eine zuverlässige Zuordnung zu finden.
Reduzierte Positionsgenauigkeit – selbst wenn die Rekonstruktion bei marginalen Überlappungsniveaus gelingt, ist die Genauigkeit des Ergebnisses beeinträchtigt. Jede Messung aus der Punktwolke oder dem Orthomosaik trägt eine größere Unsicherheit. Wissenschaftliche Forschung zeigt, dass das Absenken der Vorwärtsüberlappung von 80 % auf 60 % das Punktwolkenrauschen um etwa 50 % erhöht und die horizontale Genauigkeit um 25-40 % reduziert.
Schlechte Randqualität – unzureichende Überlappung an den Grenzen des Vermessungsgebiets erzeugt Orthomosaikränder mit sichtbaren Verzerrungen, Nahtlinien und Fehlausrichtungen. Den äußersten Bildern fehlt der vollständige Satz benachbarter Ansichten, die geometrische Randbedingungen liefern, was sie anfälliger für Positionierungsfehler macht.
Erhöhter Rückprojektionsfehler – in der Bündelausgleichslösung steigt der Rückprojektionsfehler (der durchschnittliche Abstand zwischen der projizierten Position eines Verknüpfungspunktes in einem Bild und seiner beobachteten Position). Ein höherer Rückprojektionsfehler zeigt eine schlechtere Lösung mit geringerer interner Konsistenz an. Während ein gewisser Rückprojektionsfehler unvermeidbar ist, deuten Werte deutlich über 0,5 Pixeln auf eine schwache geometrische Lösung hin.
Fehlgeschlagene Tiefenschätzung – die Multi-View-Stereo-Stufe benötigt mindestens 3 überlappende Ansichten (vorzugsweise 5+) für jedes Pixel, um eine zuverlässige Tiefenschätzung zu erzeugen. Bei unzureichender Überlappung haben große Bereiche des Bildes Tiefenschätzungen, die verrauscht, unvollständig oder vollständig fehlend sind, was Löcher in der dichten Punktwolke erzeugt.
Während mehr Überlappung im Allgemeinen besser ist als weniger, bringt übermäßige Überlappung erhebliche Kosten mit sich, die gegen die marginalen Genauigkeitssteigerungen abgewogen werden müssen.
Erhöhte Flugzeit – höhere Überlappung bedeutet mehr Bilder pro Flächeneinheit, was mehr Fluglinien, mehr Kameraauslösungen und eine längere gesamte Missionsdauer erfordert. Eine Erhöhung der Vorwärtsüberlappung von 75 % auf 90 % verdoppelt etwa die Anzahl der Bilder pro Fluglinie. Für eine Mission, die bei 75 % Überlappung 20 Minuten dauern würde, würde 90 % Überlappung etwa 35-40 Minuten dauern, was möglicherweise einen zusätzlichen Akku erfordert.
Erhöhter Speicherbedarf – mehr Bilder verbrauchen mehr Speicher auf der Speicherkarte der Drohne und auf dem Verarbeitungscomputer. Eine Vermessung, die bei 75 % Überlappung 500 Bilder erzeugt, kann bei 90 % Überlappung 1500 Bilder erzeugen. Bei 20 MB pro Bild (typisch für einen 20-MP-Sensor) ist dies der Unterschied zwischen 10 GB und 30 GB Speicher.
Exponentielle Steigerung der Verarbeitungszeit – die Rechenkosten der photogrammetrischen Verarbeitung skalieren nicht linear mit der Bildanzahl. Die SfM-Zuordnungsstufe vergleicht jedes Bild mit jedem anderen Bild, das es überlappen könnte. Bei 75 % Überlappung mit 500 Bildern, die in einem regelmäßigen Raster angeordnet sind, überlappt jedes Bild etwa 12-16 Nachbarn, was etwa 5000 Bildpaare zum Zuordnen ergibt. Bei 90 % Überlappung überlappt jedes Bild 30-40 Nachbarn, was 15.000-20.000 Bildpaare ergibt. Die Verarbeitungszeit steigt proportional zur Anzahl der Bildpaare, was Vermessungen mit 90 % Überlappung 3-5x langsamer zu verarbeiten macht als Vermessungen mit 75 % Überlappung.
Daten ohne Nutzen – jenseits von etwa 85 % Vorwärtsüberlappung und 75 % Seitenüberlappung bringt zusätzliche Überlappung vernachlässigbare Verbesserungen der Rekonstruktionsqualität. Die SfM-Lösung ist durch die vorhandene Bildgeometrie bereits gut eingeschränkt, und das Hinzufügen redundanter Ansichten führt keine neuen geometrischen Informationen ein. Die zusätzlichen Bilder duplizieren lediglich vorhandene Beobachtungen und erhöhen die Rechenlast ohne sinnvolle Genauigkeitssteigerungen.
| Überlappungsniveau | Bilder pro Flächeneinheit | Relative Verarbeitungszeit | Genauigkeitssteigerung vs. 75/65-Basislinie |
|---|---|---|---|
| 75 %/65 % | 1x (Basislinie) | 1x (Basislinie) | — |
| 80 %/70 % | 1,3x | 1,5x | +15-20 % |
| 85 %/75 % | 2x | 3x | +25-35 % |
| 90 %/80 % | 3,5x | 5x | +30-40 % |
| 95 %/85 % | 8x | 15x | +32-42 % |
Die Daten zeigen deutlich abnehmende Erträge: Der Genauigkeitsgewinn von 85 % auf 95 % Überlappung beträgt weniger als 10 %, während die Rechenkosten um das 5-fache steigen. Das praktische Optimum für die meisten Anwendungen liegt bei 75-85 % Vorwärts- und 60-75 % Seitenüberlappung.
Die Fahrbahninspektion mit Drohnen erfordert spezielle Überlappungsüberlegungen aufgrund der besonderen Eigenschaften von Fahrbahnoberflächen: große gleichmäßige Flächen mit geringer Textur, hohem Reflexionsvermögen und der Notwendigkeit, kleine Oberflächendefekte zu erkennen.
Die Herausforderung geringer Textur. Asphalt- und Betonfahrbahnoberflächen haben eine begrenzte visuelle Textur – ihnen fehlen Gras, Kies, Boden und Vegetation, die in natürlichen Geländevermessungen reichlich Verknüpfungspunkte liefern. Der SfM-Algorithmus hat weniger Merkmale, die zwischen überlappenden Bildern zugeordnet werden können, was eine zuverlässige Ausrichtung erschwert. Eine höhere Überlappung kompensiert dies, indem sie eine größere potenzielle Zuordnungsfläche bietet und die Wahrscheinlichkeit erhöht, dass der reduzierte Merkmalssatz dennoch ausreichende Korrespondenzen findet.
Empfohlene Überlappung für Fahrbahnen. Für die Fahrbahninspektion sind Vorwärtsüberlappung von 80-85 % und Seitenüberlappung von 70-75 % Standard. Diese höhere Basislinie gewährleistet eine zuverlässige Rekonstruktion selbst auf den gleichmäßigsten Fahrbahnoberflächen. Einige Behörden spezifizieren 85 % Vorwärtsüberlappung für Startbahninspektionen, um sicherzustellen, dass jeder Quadratmeter der Fahrbahnoberfläche in mindestens 7-9 Bildern erscheint.
Risserkennungsanforderungen. Die minimal erkennbare Rissbreite in einem Orthomosaik beträgt etwa das 2- bis 3-fache des Bodenabtastabstands (GSD). Bei 1 cm GSD (typisch für Fahrbahninspektion in 60-80 m Höhe) können Risse mit einer Breite von nur 2-3 mm aufgelöst werden. Eine genaue Rissbreitenmessung erfordert jedoch, dass der Riss in mehreren überlappenden Bildern sichtbar ist, um Pixelrauschen und Perspektiveffekte herauszumitteln. Eine höhere Überlappung bietet mehr Messredundanz und verbessert die Präzision der Rissbreitenmessung.
Pavement Condition Index (PCI)-Erhebungen. Die ASTM-D5340-Norm für die Bewertung des Fahrbahnzustands verlangt von Prüfern, Oberflächenschäden wie Risse, Spurrillen, Abstreuungen, Flickstellen und Schlaglöcher zu identifizieren und zu quantifizieren. Drohnenbasierte PCI-Erhebungen mit hochüberlappenden Bilddaten können eine Übereinstimmung von 90-95 % mit bodengestützten Erhebungen bei der Schadensidentifikation erreichen, bei wesentlich schnellerer Datenerfassung und vollständiger fotografischer Dokumentation.
FOD-Erkennung auf Startbahnen. Die Erkennung von Fremdkörpern (FOD) auf Flughafenstartbahnen erfordert einen GSD von 5 mm oder feiner und eine sehr hohe Überlappung, um eine vollständige Abdeckung zu gewährleisten. Vorwärtsüberlappung von 85-90 % und Seitenüberlappung von 75-80 % sind typisch für FOD-Erhebungen. Bei diesen Parametern erfordert eine Standard-Startbahnvermessung mehrere hundert Bilder pro Kilometer Startbahnlänge. Die hohe Überlappung stellt sicher, dass selbst kleine Fremdkörper (Muttern, Schrauben, Reifenfragmente) in mehreren Bildern erfasst werden, wodurch die Wahrscheinlichkeit von Erkennungslücken verringert wird.
Die Brückeninspektion mit Drohnen stellt besondere Herausforderungen an die Überlappung aufgrund der komplexen 3D-Geometrie von Brückenkonstruktionen. Eine typische Brücke umfasst eine Deckfläche, Träger, Lager, Widerlager, Pfeiler und Auffahrtsplatten – die jeweils unterschiedliche Überlappungsstrategien erfordern.
Deckfläche. Das Brückendeck – die Fahrbahnoberfläche der Brücke – wird mit standardmäßigen Nadirbildern mit 80-85 % Vorwärtsüberlappung und 70-80 % Seitenüberlappung vermessen. Das Deck ist typischerweise der am einfachsten abzubildende Teil der Brücke, da die Drohne direkt darüber in einem Rastermuster fliegen kann. Die im Vergleich zur Standardkartierung höhere Überlappung ist notwendig, da Brückendecks oft Metalloberflächen, Dehnungsfugen und andere texturarme Merkmale aufweisen, die die Anzahl verfügbarer Verknüpfungspunkte verringern.
Träger und Unterseite. Die Träger und die Unterseite des Brückendecks erfordern schräge oder horizontale Kamerawinkel, die typischerweise in Orbitalmustern unterhalb oder entlang der Brücke geflogen werden. Für diese Aufnahmewinkel wird eine Vorwärtsüberlappung von 70-80 % empfohlen, wobei zu berücksichtigen ist, dass die Geometrie von Orbitalflügen eine konsistente Überlappung schwieriger zu erreichen macht. Die komplexe Balken- und Trägergeometrie erzeugt Verdeckungen und Parallaxenverschiebungen, die die Merkmalszuordnung erschweren, sodass die zusätzliche Überlappung zur Sicherstellung einer zuverlässigen Rekonstruktion beiträgt.
Lager und Pfeiler. Brückenlager – die mechanischen Baugruppen, die Lasten zwischen Überbau und Unterbau übertragen – erfordern Nahaufnahmeinspektionen mit sehr hoher Überlappung. Für die Lagerinspektion werden Bilder aus nächster Nähe (3-10 m) mit 80-90 % Vorwärtsüberlappung aufgenommen, um sicherzustellen, dass jede Lagerfläche aus mehreren Winkeln erfasst wird. Lagerschäden (Korrosion, Risse, Verschiebungen) sind oft klein und erfordern eine detaillierte multiperspektivische Dokumentation.
Forschungsergebnisse der FHWA. Forschungen, die von der Federal Highway Administration (FHWA) und in Zeitschriften wie Remote Sensing veröffentlicht wurden, haben systematisch die Überlappungsanforderungen für die Brückeninspektionsphotogrammetrie bewertet. Eine Studie aus dem Jahr 2022 ergab, dass 80 % Vorwärtsüberlappung mit 70 % Seitenüberlappung vollständige 3D-Brückenmodelle mit Punktwolkendichten erzeugte, die ausreichen, um Risse mit einer Breite von 0,3 mm auf Betonoberflächen zu erkennen. Eine Reduzierung der Überlappung auf 60 % Vorwärts- / 40 % Seitenüberlappung führte dazu, dass 30 % des Brückenmodells Rekonstruktionslücken aufwies, insbesondere in schattigen Bereichen unter dem Deck.
| Brückenelement | Kamerawinkel | Vorwärtsüberlappung | Seiten-/Laterale Überlappung | Anmerkungen |
|---|---|---|---|---|
| Deckfläche | Nadir | 80-85 % | 70-80 % | Rasterflugmuster |
| Träger | Schräg (30-45°) | 75-80 % | 65-75 % | Orbitaler oder linearer Durchgang |
| Lager | Horizontal-schräg | 80-90 % | 70-80 % | Nahbereichsorbits |
| Widerlager | Schräg (45-60°) | 70-80 % | 60-70 % | Vertikale Oberflächen |
| Pfeiler | Schräg (45-60°) | 70-80 % | 60-70 % | Mehrdirektionale Durchgänge |
Die Erreichung der korrekten Bildüberlappung in der Praxis erfordert eine sorgfältige Flugplanung, die die spezifische Geometrie des Vermessungsgebiets und die Fähigkeiten der Drohne und Kamera berücksichtigt.
Flugplanungs-Workflow. Der Standard-Workflow beginnt mit der Definition der Vermessungsgebietsgrenze, dann der Auswahl des gewünschten GSD und der Überlappungsprozentsätze in der Missionsplanungssoftware. Die Software berechnet die erforderliche Flughöhe, den Fluglinienabstand und das Kameraauslöseintervall und erzeugt dann einen Flugpfad. Moderne Planungswerkzeuge wie DroneDeploy, Pix4Dcapture, DJI Pilot 2 und UGCS automatisieren diese Berechnung, aber der Bediener muss die zugrundeliegenden Parameter verstehen, um zu überprüfen, ob der Plan korrekt ist.
Höhenauswahl. Die Flughöhe bestimmt sowohl den GSD als auch den Bildfußabdruck. Eine höhere Höhe erzeugt größere Bodenfußabdrücke, was bedeutet, dass weniger Bilder zur Abdeckung des Vermessungsgebiets benötigt werden. Eine höhere Höhe bedeutet jedoch auch einen gröberen GSD. Die Beziehung zwischen Höhe, GSD und Überlappung ist:
L_längs = (Höhe × Sensorhöhe) / Brennweite
L_quer = (Höhe × Sensorbreite) / Brennweite
Wobei L_längs und L_quer die Längs- bzw. Querbodenfußabdruckabmessungen sind, Höhe die Flughöhe über Grund, Sensorhöhe und Sensorbreite die physischen Abmessungen des Kamerasensors und Brennweite die Objektivbrennweite.
Kameraauslöseintervall. Die Zeit zwischen aufeinanderfolgenden Kameraauslösungen bestimmt die Vorwärtsüberlappung. Das Auslöseintervall wird berechnet als:
Auslöseintervall (s) = (L_längs × (1 — O_f / 100)) / Fluggeschwindigkeit
Für eine Drohne, die mit 10 m/s fliegt, mit einem Längsbildfußabdruck von 120 m und einer gewünschten Vorwärtsüberlappung von 80 %, muss die Kamera alle 2,4 Sekunden auslösen. Missionsplanungssoftware übernimmt diese Berechnung typischerweise automatisch, aber eine manuelle Überprüfung wird für kritische Vermessungen empfohlen.
Fluglinienabstand. Der Abstand zwischen benachbarten Fluglinien bestimmt die Seitenüberlappung:
Linienabstand = L_quer × (1 — O_s / 100)
Für einen Querbildfußabdruck von 160 m und eine gewünschte Seitenüberlappung von 65 % sollten die Fluglinien 56 m voneinander entfernt sein.
Geschwindigkeitsüberlegungen. Höhere Fluggeschwindigkeiten erfordern schnellere Auslöseintervalle, um die gleiche Vorwärtsüberlappung beizubehalten. Bei 15 m/s beträgt das Auslöseintervall für 80 % Vorwärtsüberlappung mit einem 120 m Fußabdruck nur 1,6 Sekunden. Nicht alle Kameras können solche schnellen Aufnahmeraten aufrechterhalten, insbesondere beim Schreiben auf eine Speicherkarte. Die maximale Bildrate der Kamera (typischerweise 0,5-2 fps für professionelle Kameras) setzt eine harte Grenze für die erreichbare Überlappung bei einer gegebenen Geschwindigkeit. Wenn eine höhere Überlappung erforderlich ist, muss die Drohne langsamer fliegen.
Windeffekte. Wind kann dazu führen, dass die tatsächliche Geschwindigkeit der Drohne über Grund von der geplanten Geschwindigkeit abweicht. Ein Gegenwind verringert die Geschwindigkeit über Grund und erhöht effektiv die Vorwärtsüberlappung. Ein Rückenwind erhöht die Geschwindigkeit über Grund und verringert die Vorwärtsüberlappung. Für Vermessungen mit extremen Überlappungstoleranzen sollte die Missionsplanungssoftware so konfiguriert werden, dass sie eine geschwindigkeitsbasierte Auslösung anstelle einer zeitbasierten Auslösung verwendet, um eine konsistente Überlappung unabhängig von den Windbedingungen zu gewährleisten.
Batteriemanagement. Höhere Überlappung erzeugt mehr Bilder und längere Flugzeiten. Eine typische Vermessung bei 80/65 Überlappung erfordert etwa 20-25 Minuten pro 50 Hektar bei 100 m Höhe. Eine Erhöhung auf 85/75 Überlappung verlängert dies auf 35-40 Minuten. Für große Gebiete muss die Mission in mehrere Flüge unterteilt werden, die später in der Verarbeitungssoftware zusammengeführt werden.
Die Flugplanungssoftware berechnet die Überlappung basierend auf der geplanten Höhe über Grund (AGL). Allerdings ist reales Gelände selten flach, und die tatsächliche Überlappung auf Bodenhöhe kann erheblich von den geplanten Werten abweichen.
Das Problem der Geländehöhe. Wenn die Drohne in einer geplanten AGL über Gelände mit erheblichen Höhenschwankungen fliegt, variiert die tatsächliche Bodenentfernung zur Oberfläche. Über Hügelkuppen ist die Drohne näher als geplant, was den tatsächlichen Bildfußabdruck verkleinert und den GSD erhöht. In Tälern ist die Drohne weiter entfernt als geplant, was den Bildfußabdruck vergrößert und den GSD vergröbert. Der Überlappungsprozentsatz ändert sich entsprechend – die Überlappung nimmt über Hügelkuppen zu (wo der Bildfußabdruck schrumpft) und in Tälern ab (wo der Fußabdruck sich ausdehnt).
Geländefolgeflug. Geländefolgeflugmodi verwenden ein vorab geladenes digitales Höhenmodell (DEM) oder eine Echtzeit-Höhenmessung, um eine konstante AGL über variablem Gelände beizubehalten. Dies bewahrt die geplante Überlappung und den GSD über das gesamte Vermessungsgebiet. Geländefolge ist für Vermessungen in hügeligem oder bergigem Gelände unerlässlich. Ohne sie kann die Überlappung zwischen Hügelkuppen und Tälern um 10-20 Prozentpunkte variieren, was zu Abdeckungslücken in niedrigen Gebieten führt.
Urbane Gelände. Gebäude und andere Strukturen erzeugen dramatische lokale Reliefunterschiede, die die Überlappung beeinflussen. Ein Gebäude, das 30 m über das umgebende Gelände hinausragt, reduziert den effektiven Kamera-zu-Dach-Abstand um 30 m, was die tatsächliche Vorwärtsüberlappung auf Dachebene um 15-20 Prozentpunkte im Vergleich zum geplanten Wert reduzieren kann. Für urbane Vermessungen sollte die Überlappung erhöht werden, um dies auszugleichen – beginnend mit 80-85 % Vorwärtsüberlappung, um eine ausreichende Abdeckung auf Dachebene zu gewährleisten.
Wald- und Kronendacheffekte. Dichte Baumkronen erzeugen eine effektive Oberfläche, die höher und unregelmäßiger ist als die Geländehöhe. Überlappungsberechnungen, die auf der Geländehöhe basieren, unterschätzen die tatsächliche Überlappung auf Kronendachebene. Forstwirtschaftliche Vermessungen sollten die erwartete Kronenhöhe anstelle der Geländehöhe als AGL-Referenz in der Missionsplanung verwenden.
Verdeckungsschatten. Hohe Objekte erzeugen Verdeckungsschatten – Bereiche, die in der Bilddaten nicht sichtbar sind, weil sie hinter dem Objekt verborgen sind. Verdeckungsschatten sind in Nadirbildern am größten, wo sich der verborgene Bereich vom Objekt weg erstreckt. Eine höhere Überlappung hilft, Verdeckungsschatten zu mildern, indem sichergestellt wird, dass verdeckte Bereiche von verschiedenen Kamerapositionen entlang der Fluglinie sichtbar sind.
Nach der Aufnahme der Bilddaten sollte die Überlappung überprüft werden, bevor das Vermessungsgelände verlassen wird, um sicherzustellen, dass die Daten für die Verarbeitung geeignet sind. Die Überprüfung nach dem Flug erkennt Probleme frühzeitig, bevor das Flugteam das Gebiet verlassen hat und die Kosten für eine Wiederholung des Flugs prohibitiv werden.
Vor-Ort-Überprüfungsmethoden. Die zugänglichste Methode ist die Überprüfung der Bildfußabdrücke in der Missionsplanungs-App unmittelbar nach dem Flug. Die meisten Apps zeigen die ungefähre Bodenabdeckung jedes Bildes als Rechteck auf einer Karte an. Lücken zwischen Rechtecken zeigen Abdeckungslücken an. Benachbarte Rechtecke mit sehr schmalen Überlappungszonen deuten auf marginale Überlappung hin, die Verarbeitungsprobleme verursachen kann. Viele Apps melden auch die minimale, durchschnittliche und maximale Überlappung, die während der Mission erreicht wurde.
Kamerapositionsdichte-Prüfung. Eine schnelle Zählung der Bildpositionen relativ zum Vermessungsgebiet ergibt eine grobe Überlappungsprüfung. Ein 10 Hektar großes Gebiet in 100 m Höhe mit 80/65 Überlappung sollte etwa 100-150 Bilder erzeugen. Wenn die Anzahl deutlich niedriger ist, könnte die Überlappung unzureichend sein. Missionsplanungs-Apps geben typischerweise erwartete Bildanzahlen während der Planung an, und die tatsächliche Anzahl sollte eng übereinstimmen.
Photogrammetrie-Qualitätsberichte. Nach Beginn der Verarbeitung erzeugt die Photogrammetrie-Software Qualitätsberichte, die Überlappungsprobleme aufdecken. Zu den wichtigsten Indikatoren gehören:
Wiederholungsflugplanung. Wenn die Überprüfung unzureichende Überlappung ergibt, muss die Vermessung wiederholt werden. Die einfachste Korrektur besteht darin, beide Überlappungsparameter um 5-10 Prozentpunkte zu erhöhen. Für Standorte, an denen Gelände oder Strukturen das Problem verursacht haben, können Geländefolgeflug oder eine höhere Basishöhe erforderlich sein. Für texturarme Oberflächen kann das Hinzufügen von Bodenkontrollzielen oder künstlichen Texturmarkierungen die Merkmalszuordnung verbessern.
Sicherheitsmargen. Der empfohlene Ansatz ist die Planung mit Sicherheitsmargen: Stellen Sie die Überlappung 5 % höher ein als das theoretische Minimum für die Anwendung. Dies berücksichtigt Windeffekte, GPS-Drift, Geländeschwankungen und die unvermeidlichen geringfügigen Abweichungen vom idealen Flugpfad, die im realen Betrieb auftreten.
Bildüberlappung – bestehend aus Vorwärtsüberlappung (Endlap / Längsüberlappung) und Seitenüberlappung (Sidelap / laterale / Querüberlappung) – ist der grundlegende Aufnahmeparameter, der darüber entscheidet, ob eine photogrammetrische Vermessung gelingt oder scheitert. Eine Vorwärtsüberlappung von 75-85 % stellt sicher, dass jeder Bodenpunkt auf jeder Fluglinie in mehreren aufeinanderfolgenden Bildern erscheint. Eine Seitenüberlappung von 60-75 % gewährleistet eine durchgehende Abdeckung über benachbarte Fluglinien hinweg ohne Lücken. Zusammen erzeugen diese Parameter die geometrische Redundanz, die Structure-from-Motion-Algorithmen für eine zuverlässige Merkmalszuordnung, Kamerapositionstriangulation und dichte 3D-Rekonstruktion benötigen.
Unzureichende Überlappung erzeugt Rekonstruktionslücken, fehlgeschlagene Ausrichtung, reduzierte Genauigkeit und fehlende Datenbereiche – Probleme, die in der Nachbearbeitung nicht behoben werden können. Übermäßige Überlappung erhöht Flugzeit, Speicher und Verarbeitungszeit um das 3- bis 5-fache ohne proportionale Genauigkeitssteigerungen. Das praktische Optimum für die meisten Anwendungen liegt bei 75-85 % Vorwärts- und 60-75 % Seitenüberlappung, wobei höhere Werte für texturarme Oberflächen, komplexe Strukturen wie Brücken und Anforderungen an Subzentimeter-Genauigkeit reserviert sind.
Die Fahrbahn- und Startbahninspektion profitiert von höherer Überlappung (80-85 % Vorwärts-, 70-75 % Seitenüberlappung), da gleichmäßige Asphaltoberflächen weniger natürliche Verknüpfungspunkte bieten. Die Brückeninspektion erfordert spezialisierte Überlappungsstrategien für verschiedene Strukturelemente: 80-85 % Vorwärtsüberlappung für Deckflächen, 75-80 % für Träger und 80-90 % für die Nahbereichslagerinspektion. Die Überprüfung der Bildfußabdrücke und Überlappungsqualitätsberichte nach dem Flug stellt sicher, dass Probleme erkannt werden, bevor das Vermessungsteam das Gelände verlässt, und verhindert kostspielige Wiedereinsätze.
TarmacView bietet professionelle Drohnen-Photogrammetrie-Dienste mit optimierter Bildüberlappung für die Inspektion von Fahrbahnen, Infrastruktur und Luftfahrtanlagen. Kontaktieren Sie uns für ein individuelles Vermessungsangebot.
Die Drohnen-Flugplanung für die Infrastrukturinspektion umfasst die Gestaltung automatisierter Flugpfade (Waypoint-Missionen) mit geeigneter Höhe, Geschwindigke...
Ein umfassendes Glossar für Topographie, Oberflächenmerkmale und Höhenvermessung, das wichtige Konzepte, Werkzeuge und technische Standards von ICAO, USGS und m...
Photogrammetrie ist die Wissenschaft, aus überlappenden 2D-Fotografien zuverlässige 3D-Messungen und geometrische Informationen abzuleiten. In der Infrastruktur...