Drohnen-basierte Infrarot-Thermographie montiert Wärmebildkameras auf UAVs, um Brückenfahrbahnen und Fahrbahnbeläge schnell aus der Luft auf Delamination, Ablösungen und Feuchtigkeit zu untersuchen und dabei große Flächen ohne Verkehrsbehinderung abzudecken. Die KI-Analyse von Wärmemustern automatisiert die Fehlererkennung. Behandelt Drohnen-IRT-Systemdesign, Flugplanung für thermische Untersuchungen, Datenverarbeitung und Integration mit visueller RGB-Inspektion.
Drohnen-basierte Infrarot-Thermographie für Brücken- und Fahrbahninspektion
Drone-IRT-Systemkomponenten
Ein drohnen-basiertes Infrarot-Thermographie-System (Drone IRT) umfasst mehrere kritische Subsysteme, die zusammenarbeiten müssen, um genaue, georeferenzierte thermische Daten zu erzeugen, die für die Erkennung oberflächennaher Fehler geeignet sind. Die Wärmebildkamera-Nutzlast ist der Kern-Sensor – typischerweise eine ungekühlte Mikrobolometer-basierte Langwellen-Infrarotkamera (LWIR), die im Spektralband 7,5–14 µm arbeitet. Die gängigsten Nutzlasten sind die DJI Zenmuse H20T (640×512 Pixel Auflösung, 12 µm Pixelpitch, ≤50 mK Rauschäquivalente Temperaturdifferenz oder NETD, Blende f/1,0, ±2 °C oder ±2 % absolute Genauigkeit), die FLIR Vue Pro R (640×512, 12 µm, <50 mK NETD, radiometrische Kalibrierung, erhältlich mit 9 mm, 13 mm oder 19 mm Objektivoptionen) und die Workswell WIRIS Pro (640×512, 30 mK NETD, 10× kontinuierlicher optischer Zoom, Temperaturmessbereich von −20 °C bis +1500 °C). Diese Kameras wiegen je nach Modell und Konfiguration zwischen 270 g und 460 g und sind mit den Nutzlastgrenzen kommerzieller Multikopter-Drohnen wie der DJI Matrice 300 RTK (maximale Nutzlast 2,7 kg) oder der DJI Matrice 350 RTK kompatibel.
Gimbal-Stabilisierung
Die Wärmebildkamera muss auf einem 3-achs-stabilisierten Gimbal montiert sein, der den Sensor von Drohnenvibrationen, Winkelbewegungen und windinduzierten Schwingungen isoliert. Ohne Gimbal-Stabilisierung würden Vibrationsfrequenzen der Drohnenmotoren (typischerweise 150–400 Hz bei Multikoptern) und Flugdynamiken (Nick-, Roll- und Gierbewegungen während Kurskorrekturen) Bewegungsunschärfe in den Wärmebildern verursachen und die räumliche Auflösung sowie die thermische Messgenauigkeit beeinträchtigen. Hochwertige Gimbals wie die DJI Zenmuse-Serie bieten eine Winkelstabilisierungsgenauigkeit von 0,01° und ermöglichen so scharfe Wärmebildaufnahmen selbst während des Vorwärtsflugs mit Geschwindigkeiten bis zu 15 m/s (54 km/h). Der Gimbal ermöglicht auch die präzise Kameraausrichtung – entscheidend für die Inspektion vertikaler Brückenelemente (Pfeilerflächen, Widerlager, Trägerstege), bei der die Kamera senkrecht zur Zieloberfläche ausgerichtet sein muss, um emissionsgradbedingte Temperaturmessfehler durch schräge Betrachtung zu vermeiden. Die meisten Gimbals unterstützen automatisierte Schwenk- und Neigesequenzen, die in die Flugmission programmiert werden können, für eine systematische multiwinklige Abdeckung komplexer Brückengeometrien.
RTK-GPS-Integration
Echtzeit-Kinematik-GPS (RTK-GPS) ist das Positionierungs-Rückgrat eines produktionsreifen Drone-IRT-Systems. RTK bietet eine horizontale absolute Positionierungsgenauigkeit von 2–5 cm und eine vertikale von 3–7 cm, indem GPS-Signalfehler mithilfe einer festen Basisstation mit bekannten Koordinaten korrigiert werden, die Korrekturdaten per Funkverbindung (typischerweise 900 MHz oder 2,4 GHz Funkmodems oder 4G/5G-Mobilfunknetze für großflächige Einsätze) an die Drohne übermittelt. Die Drohne zeichnet für jedes Wärmebild die RTK-Position, Höhe (über dem mittleren Meeresspiegel), Lage (Nick, Roll, Gier) und den Kameraauslösezeitstempel auf – typischerweise als EXIF-Metadaten oder in einer separaten, mit dem Bildaufnahmeereignis synchronisierten Telemetrielogdatei. Diese georäumlichen Metadaten ermöglichen eine präzise Koregistrierung zwischen Wärmebildern und Brückenplanzeichnungen, GIS-Datenbanken oder 3D-Punktwolken aus LiDAR- oder Photogrammetrie-Vermessungen. Ohne RTK bietet Standard-GPS nur eine Genauigkeit von 2–5 m, was für die zuverlässige Lokalisierung von Fehlern auf einer Brückenfahrbahn, wo die thermische Anomalie möglicherweise nur 20–30 cm Durchmesser hat, unzureichend ist. Einige Systeme integrieren auch eine Post-Processed Kinematic (PPK)-Korrektur für Einsätze, bei denen keine Echtzeit-RTK-Korrekturverbindungen verfügbar sind, und verarbeiten Basisstationsdaten nach dem Flug, um eine gleichwertige Genauigkeit zu erreichen.
30–50 Min. Flugzeit (Hybrid), 20–30 Min. (elektrisch)
RGB-Kamera-Integration
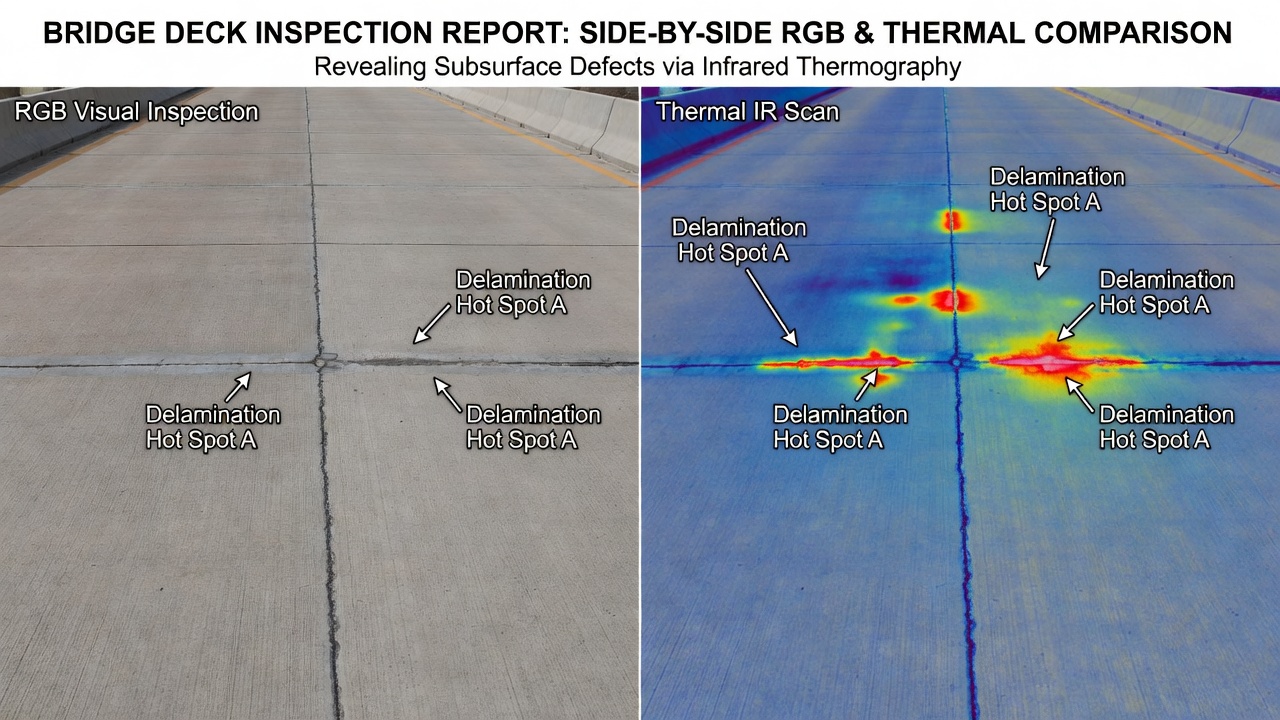
Die meisten Drone-IRT-Nutzlasten integrieren eine hochauflösende RGB-Kamera zusammen mit dem Wärmesensor, was die gleichzeitige Erfassung von Bildern im sichtbaren Spektrum und Wärmebildern ermöglicht. Die DJI Zenmuse H20T kombiniert beispielsweise die Wärmebildkamera mit einer 20-MP-Weitwinkel-RGB-Kamera, einer 12-MP-Telekamera (2× optischer Zoom) und einem Laser-Entfernungsmesser in einem einzigen Gimbal-Gehäuse. Die gleichzeitige RGB- und Wärmebilderfassung ermöglicht Bildfusion – das Überlagern der Thermo- auf das sichtbare Bild, um räumlichen Kontext für die Anomalieinterpretation zu schaffen. Ein RGB-Referenzbild hilft dem Analysten, zwischen echten fehlerbedingten thermischen Anomalien und falschen Signalen von Oberflächenmerkmalen wie Ölflecken, Gummiablagerungen, ausgebesserten Bereichen, Farbmarkierungen oder Ablagerungen zu unterscheiden. Nachbearbeitungspipelines können geteilte Bildschirm- oder überlagerte Visualisierungsprodukte erzeugen, bei denen die thermische Anomalie (in Falschfarben dargestellt) halbtransparent über das hochauflösende RGB-Bild gelegt wird. Dieses fusionierte Produkt ist für Brückeningenieure, die mit der Interpretation von Roh-Thermogrammen nicht vertraut sind, deutlich besser interpretierbar.
Flugplanung für thermische Untersuchungen
Zeitpunkt der Sonneneinstrahlung
Der mit Abstand wichtigste Faktor für den Erfolg einer passiven Drone-IRT-Untersuchung ist der Zeitpunkt der Sonneneinstrahlung – die Durchführung der Untersuchung, wenn die Sonne ausreichend thermische Energie liefert, um messbare Temperaturdifferenzen zwischen fehlerhaften und intakten Bereichen zu erzeugen. Die Physik ist einfach: Solarstrahlung dringt in die Oberfläche ein und leitet nach unten ins Material. Eine luftgefüllte Delamination (Wärmeleitfähigkeit 0,026 W/mK) blockiert diesen konduktiven Wärmefluss, wodurch sich die Oberfläche über dem Fehler schneller erwärmt und eine höhere Temperatur erreicht als der umgebende intakte Beton (Leitfähigkeit 1,7–2,5 W/mK). Die Größe dieser Differenz hängt von der Sonnenintensität, dem Einfallswinkel, der atmosphärischen Transmission und der Einwirkungsdauer ab.
Forschung des Virginia Transportation Research Council (VTRC-Bericht 20-R22) und FHWA-Richtlinien legen fest, dass das optimale Untersuchungsfenster für Tagesuntersuchungen 5–9 Stunden nach Sonnenaufgang liegt (ungefähr 10:00–15:00 Uhr Ortszeit in gemäßigten Breiten vom späten Frühjahr bis zum frühen Herbst). Innerhalb dieses Fensters übersteigt die Solarstrahlung 600 W/m² an der Oberfläche unter klarem Himmel, und der thermische Kontrast zwischen delaminiertem und intaktem Beton erreicht sein Maximum – typischerweise 1,0–3,0 °C für unbeschichtete Betonfahrbahnen. Der thermische Spitzenkontrast liegt typischerweise 1–3 Stunden hinter dem Sonnenhöchststand aufgrund der thermischen Trägheit der Betonmasse. Nachtuntersuchungen (3–5 Stunden nach Sonnenuntergang) liefern inversen thermischen Kontrast – der delaminierte Bereich ist wärmer als der umgebende Beton, weil der Luftspalt die gespeicherte Wärme am Abfließen hindert – und vermeiden die Schattenartefakte, die durch Brückenüberbauelemente, angrenzende Gebäude oder Vegetation bei Tagesuntersuchungen verursacht werden.
Faktor
Günstige Bedingung
Ungünstige Bedingung
Tageszeit
10:00–15:00 (Tag); 20:00–0:00 (Nacht)
Dämmerungsübergänge
Bewölkung
Klarer Himmel (0–10 % Bewölkung)
Bedeckt (>50 % Bewölkung), lockere Wolken
Solarstrahlung
>600 W/m²
<250 W/m²
Oberflächenzustand
Trocken, sauber
Nass, schneebedeckt, mit Ablagerungen
Windgeschwindigkeit
<24 km/h (15 mph)
>32 km/h (20 mph)
Jahreszeit
Spätes Frühjahr bis früher Herbst
Winter (Okt.–Feb. auf der Nordhalbkugel)
Das Wisconsin Department of Transportation (WisDOT) und AECOM (Studie 2024) empfehlen, thermische Tagesuntersuchungen strikt zwischen 11:00 und 14:00 Uhr Ortszeit an klaren, sonnigen Tagen zwischen Mai und Oktober in nördlichen US-Klimazonen durchzuführen. Für Brückenfahrbahnen mit Asphaltüberzügen ist eine längere Sonneneinstrahlung erforderlich, da der Überzug das thermische Signal dämpft – das empfohlene Fenster erweitert sich auf 6–10 Stunden nach Sonnenaufgang. Das Indiana DOT hat festgelegt, dass die Solarstrahlung für eine zuverlässige Delaminationserkennung auf überzogenen Fahrbahnen eine kumulative Gesamtexposition von 500 W-h/m² überschreiten muss. Bewölkung, selbst vorübergehende lockere Wolken, reduziert den thermischen Kontrast drastisch, da sie die direkte Sonnenstrahlung (die zur Mittagszeit ~900 W/m² liefert) durch diffuse Himmelsstrahlung (typischerweise 100–300 W/m²) ersetzt.
Flughöhe und Bodenabdeckung
Die Flughöhe bestimmt sowohl die räumliche Auflösung (Bodenabtastabstand) als auch die Flächenabdeckung pro Bild. Der Zusammenhang folgt aus der grundlegenden optischen Geometrie: Eine gegebene Höhe A und das horizontale Gesichtsfeld (FOV) der Kamera ergeben eine Bodenstreifenbreite W = 2 × A × tan(FOV/2). Für eine DJI Zenmuse H20T mit 24° horizontalem FOV beträgt die Streifenbreite in 30 m Höhe 2 × 30 × tan(12°) ≈ 12,8 m. In 60 m Höhe verdoppelt sich die Streifenbreite auf etwa 25,5 m. Niedrigere Höhen bieten eine bessere Fehlererkennungsempfindlichkeit, erfordern jedoch mehr Fluglinien, um dieselbe Fläche abzudecken, was die Gesamtflugzeit und die Anzahl der benötigten Batterien erhöht.
Die Geschwindigkeit der Drohne muss mit der Höhe und der Bildrate der Kamera abgestimmt sein, um eine ausreichende Bildüberlappung zu gewährleisten. Für die Erzeugung von Thermomosaiken werden 70–80 % Vorwärtsüberlappung (in Flugrichtung) und 60–70 % Seitenüberlappung (quer zur Flugrichtung) empfohlen – dieselben photogrammetrischen Best Practices, die auch für die RGB-Orthomosaik-Erzeugung verwendet werden. Bei einer typischen Untersuchungsgeschwindigkeit von 5 m/s (18 km/h) und einem Kamera-Aufnahmeintervall von 2 Sekunden beträgt die Vorwärtsverschiebung zwischen aufeinanderfolgenden Bildern 10 m. Bei einem GSD von 3 cm/Pixel und einem Bildausschnitt von 640 Pixel × 2,7 cm = 17,3 m beträgt die Vorwärtsüberlappung 17,3 m − 10 m = 7,3 m, also 42 % – unter dem empfohlenen Schwellenwert. Um bei 5 m/s eine Vorwärtsüberlappung von 70 % zu erreichen, muss das Aufnahmeintervall auf etwa (17,3 × 0,30) / 5 = 1,04 Sekunden reduziert werden, was eine Kamera erfordert, die dauerhafte 1-Hz-Aufnahmeraten ohne Überhitzung oder Pufferüberlauf unterstützt.
Überlappungsanforderungen für Thermomosaike
Die hohen Überlappungsanforderungen für die Erzeugung von Thermomosaiken stellen eine besondere Herausforderung für Drone IRT dar. Wärmebildkameras haben typischerweise niedrigere Bildraten (8–30 Hz) und langsamere Datenschreibgeschwindigkeiten als RGB-Kameras, was einen Engpass bei der Erreichung der 70–80 % Vorwärtsüberlappung für eine hochwertige Mosaikzusammenstellung darstellt. Praktische Lösungen umfassen:
Reduzierte Untersuchungsgeschwindigkeit: Das Senken der Drohnengeschwindigkeit auf 3–4 m/s (10–14 km/h) ermöglicht der Wärmebildkamera die Aufnahme von Bildern mit ausreichender Überlappung. Dies verlängert die Flugzeit pro Untersuchungsfläche, verbessert aber die Mosaikqualität.
Mehrfachgitter-Flugmuster: Das Fliegen überlappender paralleler Gitter (z. B. abwechselnd Nord-Süd- und Ost-West-Pässe) bietet eine redundante Abdeckung, die die photogrammetrische Lösung verbessert, selbst wenn einzelne Pässe eine geringere Vorwärtsüberlappung aufweisen. Die Seitenüberlappung zwischen senkrechten Pässen beträgt effektiv 100 %.
Adaptive Aufnahmerate: Moderne Flugplanungssoftware wie DJI Pilot 2, UgCS oder Pix4Dcapture kann geländebewusste Aufnahmeintervalle berechnen, die die Bildrate basierend auf Drohnengeschwindigkeit und -höhe automatisch anpassen, um die Zielüberlappung beizubehalten.
Die Brückeninspektions-Forschungsgemeinschaft hat festgestellt, dass ein thermisches Orthomosaik mit einem GSD von 3–5 cm/Pixel und einer Positionsgenauigkeit von 5–10 cm (relativ zum RTK-Bodenwahrheitswert) ausreicht, um delaminierte Bereiche mit einem Durchmesser von nur 200 mm zu identifizieren – was der minimal berichtspflichtigen Fehlergröße in den meisten Brückeninspektionshandbüchern der staatlichen Straßenbauverwaltungen (DOTs) entspricht.
Thermische Auflösung und Bodenabtastabstand
Pixelpitch und seine Auswirkung auf die Temperaturmessung
Der Bodenabtastabstand (GSD) in der Wärmebildtechnik definiert die physikalische Fläche auf der Zieloberfläche, die einem einzelnen Pixel im Wärmebild-Array entspricht. Die Formel lautet:
GSD = (Pixelpitch × Höhe) / Brennweite
Wobei Pixelpitch der Mittenabstand der Mikrobolometer-Detektorelemente auf dem Sensor-Array ist, Höhe der Abstand von der Kamera zur Zieloberfläche (über Grund für nadirblickende Untersuchungen) und Brennweite die effektive Brennweite des Linsensystems. Für die DJI Zenmuse H20T (12 µm Pixelpitch, 13,5 mm Brennweite) in 30 m Höhe über der Fahrbahnoberfläche:
GSD = (0,012 mm × 30.000 mm) / 13,5 mm = 26,7 mm ≈ 2,7 cm/Pixel
Jedes 640×512 Pixel große Wärmebild in 30 m Höhe deckt eine Fläche von etwa 17,3 m × 13,8 m ab, wobei jedes Pixel die Temperatur einer 2,7 cm × 2,7 cm großen Oberfläche integriert. Die für jedes Pixel gemeldete Temperatur ist die flächengewichtete Durchschnittstemperatur von allem innerhalb dieses Bodenausschnitts – einschließlich Beton, Rissöffnungen, Oberflächenablagerungen und eventueller Teilschatten oder Feuchtigkeit. Dieser Mitteleffekt führt dazu, dass kleine Fehler (kleiner als 2–3 GSD-Einheiten) Temperaturmesswerte liefern, die teilweise durch das umgebende intakte Material verwässert werden, wodurch der scheinbare thermische Kontrast reduziert wird.
Kameramodell
Brennweite
Höhe (m)
GSD (cm/px)
Streifenbreite (m)
Zenmuse H20T
13,5 mm
30
2,7
17,3
Zenmuse H20T
13,5 mm
50
4,4
28,8
Zenmuse H20T
13,5 mm
75
6,7
43,1
FLIR Vue Pro R (13 mm)
13 mm
30
2,8
17,7
FLIR Vue Pro R (19 mm)
19 mm
50
3,2
20,3
Workswell WIRIS Pro
25 mm
50
2,4
15,4
Für die Delaminationserkennung auf Brückenfahrbahnen ist ein GSD von 3–5 cm/Pixel der allgemein empfohlene Arbeitsbereich. Bei einem GSD unter 2 cm wird die Untersuchung ineffizient, weil die schmale Streifenbreite viele parallele Fluglinien erfordert und das thermische Bildrauschen die Fähigkeit einschränken kann, zwischen benachbarten Pixeln mit sehr geringen Temperaturunterschieden zu unterscheiden. Bei einem GSD über 8 cm können kleine Delaminationen (200–300 mm Durchmesser) nur 3–6 Pixel belegen – zu wenige für eine zuverlässige Erkennung durch visuelle Analyse oder KI-Algorithmen. Die Drone-IRT-Studien der University of Nebraska-Lincoln ergaben, dass die Erkennungswahrscheinlichkeit für Fehler kleiner als das 3-fache des GSD unter 60 % fällt, während Fehler, die 10+ Pixel abdecken, Erkennungsraten über 90 % erreichen.
NETD und minimale nachweisbare Temperaturdifferenz
Die Rauschäquivalente Temperaturdifferenz (NETD) – ausgedrückt in Millikelvin (mK) – stellt die kleinste Temperaturdifferenz dar, die die Kamera vom thermischen Rauschboden unterscheiden kann. Moderne LWIR-Mikrobolometerkameras, die in Drone IRT verwendet werden, erreichen NETD-Werte von 20–50 mK (0,02–0,05 °C). Dies bedeutet, dass die Kamera Temperaturunterschiede von 0,05 °C oder mehr zwischen benachbarten Pixeln zuverlässig erkennen kann, sofern ein ausreichendes Signal vorhanden ist. Die praktische minimale nachweisbare ΔT für eine fehlerbedingte thermische Anomalie ist jedoch höher als die NETD, weil:
Die beobachtete ΔT zwischen fehlerhaften und intakten Bereichen muss die NETD der Kamera um mindestens das 3–5-fache überschreiten, um eine zuverlässige Erkennung zu gewährleisten (Signal-Rausch-Verhältnis >3).
Die atmosphärische Dämpfung zwischen Kamera und Ziel (selbst in Drohnenhöhen von 30–60 m) reduziert den scheinbaren thermischen Kontrast je nach Luftfeuchtigkeit und Temperatur um 2–5 %.
Variationen des Oberflächenemissionsgrades (Beton 0,85–0,95, Asphalt 0,90–0,97, Wasser 0,96, ölverschmutzter Beton 0,92) führen selbst bei gleichmäßiger tatsächlicher Oberflächentemperatur zu scheinbaren Temperaturfehlern von 0,2–0,5 °C.
Die räumliche Mittelung über den GSD-Ausschnitt verwässert das thermische Signal kleiner Fehler.
Die praktische minimale nachweisbare ΔT für Drone-IRT-Brückenfahrbahninspektionen beträgt unter guten Bedingungen (klarer Himmel, schwacher Wind, >600 W/m² Solarstrahlung, trockene Oberfläche) etwa 0,5 °C. Unter Grenzbedingungen (dünne Bewölkung, mäßiger Wind, früher Morgen oder später Nachmittag) steigt die minimal nachweisbare ΔT auf 1,0–1,5 °C. FHWA-Richtlinien besagen, dass ΔT-Werte unter 0,5 °C als nicht schlüssig betrachtet und durch andere Methoden verifiziert werden sollten. Typische Delaminations-bezogene ΔT-Werte reichen von 0,5 °C (grenzwertig, tiefer Fehler unter Überzug) bis 3 °C+ (starkes Signal, flacher Fehler auf blanker Fahrbahn zur Mittagszeit).
Datenverarbeitung und Erzeugung von Thermomosaiken
Radiometrische Kalibrierung und Normierung
Die rohen Wärmebilddaten von drohnenmontierten Kameras bestehen aus 14-Bit- oder 16-Bit-Digitalzählwerten, die den auf jeden Detektor-Pixel einfallenden Infrarotfluss darstellen. Die Umwandlung dieser Rohwerte in physikalische Temperatur erfordert eine radiometrische Kalibrierung unter Verwendung der Werkskalibrierdaten der Kamera – eine polynomische Übertragungsfunktion, die Digitalzählwerte auf die Szenenstrahldichte abbildet, kombiniert mit Korrekturen für die interne Kameratemperatur, Integrationszeit und optische Transmission. Die Kalibrierfunktion ist typischerweise:
T = f(DN, T_Gehäuse, T_Linse, R_Feuchte, R_Entfernung)
Wobei DN der rohe Digitalzahlwert ist, T_Gehäuse und T_Linse interne Kameratemperaturen (von Bordsensoren gemessen), R_Feuchte die relative Luftfeuchtigkeit, die die atmosphärische Transmission beeinflusst, und R_Entfernung der Abstand von der Kamera zum Ziel. Moderne radiometrische Wärmebildkameras (DJI H20T, FLIR Vue Pro R) führen diese Korrekturen bordseitig für jedes Pixel und jedes Bild durch und geben temperaturkalibrierte Daten in radiometrischen JPEG-Formaten aus (R-JPEG oder TIFF mit eingebetteten Temperatur-Arrays).
Nach der Kalibrierung der Einzelbilder erfordert das Thermomosaik eine Temperaturnormierung, da sich die thermische Umgebung während des Untersuchungsflugs ändert. Die Sonneneinstrahlung variiert mit dem Sonnenwinkel, während sich die Drohne über das Untersuchungsgebiet bewegt (insbesondere bei großen Brückenfahrbahnen oder Fahrbahnabschnitten, die 20–30-minütige Flüge erfordern). Eine Änderung des Sonnenhöhenwinkels um 15° während eines Untersuchungsflugs kann die absolute Oberflächentemperatur um 2–4 °C verändern, was einen sichtbaren Gradienten über das Thermomosaik erzeugt, der nichts mit oberflächennahen Fehlern zu tun hat. Normierungsalgorithmen passen eine Polynomfläche niedriger Ordnung (typischerweise zweiter Ordnung) an die Hintergrundtemperaturverteilung an und subtrahieren dann diese Fläche, um lokale thermische Anomalien zu isolieren. Alternative Ansätze umfassen den Histogrammabgleich zwischen überlappenden Bildstreifen oder die Referenzplatten-Normierung unter Verwendung kalibrierter Schwarzkörper-Referenzen im Gesichtsfeld der Untersuchung.
Erzeugung thermischer Orthomosaike
Die Erstellung eines georeferenzierten thermischen Orthomosaiks folgt dem Structure-from-Motion (SfM)-Photogrammetrie-Workflow, angepasst an die geringeren Kontraste und höheren Rauscheigenschaften von Wärmebildern. Der Verarbeitungsablauf umfasst:
Merkmalsextraktion: Charakteristische thermische Merkmale – Kanten von Schattenmustern, Fahrbahnmarkierungen (die einen anderen thermischen Emissionsgrad haben), Dehnungsfugen, Fahrstreifenmarkierungen und Baufugen – werden über überlappende Wärmebilder hinweg mit Algorithmen wie SIFT (Scale-Invariant Feature Transform) oder AKAZE (Accelerated KAZE) erkannt. Wärmebilder haben weniger und weniger ausgeprägte Merkmale als RGB-Bilder, daher ist die höhere Überlappung (70–80 %) unerlässlich, um ausreichende Merkmalskorrespondenzen zu gewährleisten.
Bündelausgleichung: Die relativen Kamerapositionen und -orientierungen werden unter Verwendung abgeglichener Merkmalspunkte über den Bildsatz hinweg gelöst, eingeschränkt durch RTK-GPS-Kamerapositionen. Die Bündelausgleichung erzeugt eine dünne 3D-Punktwolke von Verknüpfungspunkten und verfeinert die Kamerakalibrierung (Brennweite, Hauptpunkt, Linsenverzerrungsparameter).
Dichte Zuordnung und Netzerzeugung: Eine dichte Punktwolke wird für die Bodenoberfläche erzeugt, und ein trianguliertes Netz oder ein digitales Höhenmodell (DEM) wird berechnet. Für Brückenfahrbahnuntersuchungen ist die Oberfläche annähernd planar, sodass ein 2,5D-DEM typischerweise ausreichend ist.
Orthofoto-Entzerrung: Jedes Wärmebild wird unter Verwendung des DEM und der Kameraparameter orthoentzerrt und dann unter Verwendung von Nahtlinienoptimierung und Farb-/Thermobilanz (Anpassung an Helligkeits- und Temperaturunterschiede zwischen Bildern) zu einem kontinuierlichen Mosaik zusammengefügt. Die Ausgabe ist ein georeferenziertes thermisches Orthomosaik im GeoTIFF-Format mit eingebetteten Temperaturwerten.
Das endgültige thermische Orthomosaik erreicht typischerweise 2–5 cm GSD und 5–10 cm absolute Positionsgenauigkeit relativ zur RTK-Bodenwahrheit. Dateigrößen für eine 500 m × 20 m große Brückenfahrbahn bei 3 cm GSD liegen im Bereich von 500–1500 MB für Einband-32-Bit-Gleitkomma-Temperaturdaten, was erhebliche Prozessorhardware und optimierte Kachelung für die Web-Auslieferung erfordert.
KI-basierte thermische Anomalieerkennung
Künstliche Intelligenz und Deep Learning haben die thermische Anomalieerkennung von einer subjektiven, erfahrungsabhängigen Expertenanalyse in einen automatisierten, quantitativen und reproduzierbaren Prozess verwandelt. Der grundlegende Ansatz behandelt die thermische Anomalieerkennung als eine Bildsegmentierungs-Aufgabe – die Zuweisung einer Wahrscheinlichkeit zu jedem Pixel im thermischen Orthomosaik, zur Klasse “Fehler” oder “intakt” zu gehören.
Die U-Net-Architektur ist das am weitesten validierte Deep-Learning-Modell für die Wärmebildsegmentierung in zivilen Infrastrukturanwendungen. Die Encoder-Decoder-Struktur des U-Net mit Skip-Verbindungen bewahrt sowohl hochrangige semantische Merkmale (Fehlertyp, Form) als auch feinkörnige räumliche Details (Fehlergrenzen, Kanten). Forschungsstudien berichten über eine U-Net-Segmentierungsgenauigkeit von 84,7 % (Dice-Koeffizient) für die Delaminationserkennung auf Brückenfahrbahnen aus fahrzeugmontierten Thermo-Daten, mit einer Präzision von 82 % und einem Recall von 87 %. Das U-Net wurde auf über 15.000 markierten Wärmebildausschnitten (128×128 Pixel) trainiert, die aus Tag- und Nachtuntersuchungen von 12 Brückenfahrbahnen in Florida und Virginia extrahiert wurden.
Transformer-basierte Modelle – insbesondere das Open-Set-Objekterkennungs-Framework Grounding DINO – haben eine mittlere durchschnittliche Präzision (mAP@[0.5:0.95]) von 70 % auf Brückenfahrbahn-Thermodaten des KI-integrierten IRT-Frameworks der University of Central Florida (NDT-CE 2025) erreicht. Das Modell erreichte ein Erkennungsverhältnis von 78 % gegenüber verarbeiteten IR-Benchmark-Daten mit einem durchschnittlichen Intersection over Union (IoU) von 0,89, was auf eine enge Übereinstimmung zwischen vorhergesagten Fehlergrenzen und der Bodenwahrheit hinweist. Das Modell wurde auf über 23.000 rohen Wärmebildern (nicht vorverarbeitet) mit von Experten markierten Fehlerannotationen trainiert, die auf physikalische Positionen auf der Fahrbahnoberfläche abgebildet wurden.
Klassisches maschinelles Lernen bleibt für Szenarien mit begrenzten Trainingsdaten relevant. Merkmalsextraktionstechniken berechnen thermische Texturparameter innerhalb gleitender Fenster – mittlere Temperatur, Standardabweichung, Schiefe (Asymmetrie der Temperaturverteilung), Kurtosis (Spitzenschärfe), Entropie (Temperaturzufälligkeit) und Kontrast (lokaler Temperaturvariationsbereich) – und speisen diese Merkmalsvektoren in Klassifikatoren wie Random Forest (berichtete 79 % Genauigkeit) oder Support Vector Machines (SVM, berichtete 76 % Genauigkeit). Level-Set-Methoden basierend auf aktiver Konturentwicklung haben korrekte positive Identifikationsraten (CPR) von 80,2 % bei Falschpositivraten (FPR) von 11,5 % erreicht.
Automatisierte Reduzierung von Falschpositiven
Falschpositive in Drone-IRT-Daten entstehen durch Oberflächenmerkmale, die thermische Anomalien erzeugen, die in einem einzelnen Wärmebild nicht von echten Fehlern zu unterscheiden sind. Häufige Falschpositiv-Quellen sind: Ölflecken (niedriger Emissionsgrad → erscheint heiß), Feuchtigkeitsstellen (Verdunstungskühlung → erscheint kalt), Oberflächentexturveränderungen (Rillen, Besenstrich → geringe Temperaturschwankungen), Ablagerungen (Blätter, Kies → variable thermische Signatur), Farbmarkierungen (unterschiedlicher Emissionsgrad → scheinbarer Temperaturversatz) und Schatten von Brückengeländern oder Überbauelementen (Kaltzonen). KI-Modelle reduzieren Falschpositive durch multispektrale Fusion – gleichzeitige Analyse des registrierten RGB-Bildes, um Oberflächenmerkmale zu kennzeichnen und von der Fehlerklassifikation auszuschließen. Das UCF Grounding DINO-Modell integriert den RGB-Kontext als zusätzlichen Eingabekanal und reduziert die Falschpositivraten um 35 % im Vergleich zur rein thermischen Erkennung. Multitemporale Analysen (Vergleich von Tag- und Nacht-Thermountersuchungen desselben Gebiets) reduzieren Falschpositive weiter, da echte Fehler konsistente thermische Signaturen zeigen, während Umweltartefakte sich ändern.
Erkennung von Delaminationen auf Brückenfahrbahnen per Drohne
Physikalische Prinzipien der Delaminationserkennung
Delamination in Betonbrückenfahrbahnen ist eine horizontale Trennung innerhalb der Platte, die typischerweise auf oder nahe der Ebene der oberen Bewehrung auftritt – etwa 50–100 mm unter der Fahrbahnoberfläche in einer typischen 200–250 mm dicken Betonbrückenfahrbahn. Korrosion der oberen Bewehrungslage erzeugt expansive Korrosionsprodukte (Eisenoxide und -hydroxide – Rost), die Zugspannungen erzeugen, die die Zugfestigkeit des Betons (typischerweise 3–5 MPa für Normalbeton) überschreiten. Der resultierende horizontale Riss breitet sich entlang der Bewehrungsebene aus und erzeugt einen luftgefüllten Spalt, der typischerweise 0,1 mm bis 5 mm dick ist. Dieser Luftspalt wirkt als thermischer Isolator – die Wärmeleitfähigkeit von Luft (0,026 W/m·K) ist etwa 50–80 Mal geringer als die von Beton (1,7–2,5 W/m·K). Selbst ein 0,5 mm dicker Luftspalt bietet einen thermischen Widerstand, der etwa 25–40 mm massivem Beton entspricht.
Während der Sonneneinstrahlung der Brückenfahrbahn fließt Wärme in die Betonoberfläche und leitet nach unten. Wo eine Delamination existiert, trifft die Wärme auf eine isolierende Barriere, die eine weitere Abwärtsleitung verhindert. Der Beton über der Delamination absorbiert weiterhin Sonnenenergie, kann sie aber nicht in die darunterliegende Platte ableiten, wodurch seine Temperatur über die des umgebenden intakten Betons ansteigt. Die Temperaturdifferenz (ΔT) an der Oberfläche über einer Delamination folgt der transienten Wärmeleitungsgleichung:
∂T/∂t = α (∂²T/∂x² + ∂²T/∂y² + ∂²T/∂z²)
Wobei T die Temperatur, t die Zeit und α die Temperaturleitfähigkeit ist (α = k/ρcp, etwa 0,7 × 10⁻⁶ m²/s für Beton, 0,07 × 10⁻⁶ m²/s für Asphalt). Die Lösung dieser Gleichung mit einer Delaminations-Randbedingung zeigt, dass die Oberflächen-ΔT umgekehrt von der Fehlertiefe abhängt – ein Fehler in 25 mm Tiefe erzeugt unter identischer Sonneneinstrahlung etwa die 4-fache Oberflächen-ΔT eines Fehlers in 100 mm Tiefe.
Tiefenbegrenzungen und Überzugseffekte
Die maximale Tiefe, in der eine Delamination durch passive Drone IRT zuverlässig erkannt werden kann, beträgt etwa 100–150 mm von der Oberfläche unter optimalen Sonneneinstrahlungsbedingungen (>600 W/m², klarer Himmel, trockene Oberfläche, schwacher Wind). Jenseits dieser Tiefe wird die thermische Diffusionswelle von der Oberfläche so stark gedämpft, dass die durch die Delamination verursachte Störung eine Oberflächen-ΔT unterhalb der Erkennungsschwelle von 0,5 °C erzeugt. Dies bedeutet, dass für eine standardmäßige 200–250 mm dicke Betonbrückenfahrbahn Delaminationen in voller Fahrbahnplattentiefe (nahe der unteren Bewehrung) von der Oberfläche aus durch passive Thermographie in der Regel nicht nachweisbar sind.
Bei Brückenfahrbahnen mit Asphaltüberzügen steigt die Erkennungsherausforderung erheblich. Ein Asphaltüberzug von 50 mm Dicke (2 Zoll) reduziert die Oberflächen-ΔT einer Betondelamination im Vergleich zu einer blanken Fahrbahn um etwa 50–60 %. Diese Dämpfung tritt auf, weil der Überzug thermische Masse hinzufügt (Wärme absorbiert), die thermische Anomalie seitlich verteilt (thermische Diffusion innerhalb des Überzugs) und eine zusätzliche Grenzfläche (Überzug-Fahrbahn-Verbund) einführt, die ihre eigene thermische Signatur haben kann. ASTM D4788 legt fest, dass die Methode auf Überzügen bis zu 100 mm Dicke (4 Zoll) angewendet werden kann, aber der Virginia Transportation Research Council stellte fest, dass die Erkennungszuverlässigkeit jenseits von 75 mm Überzügen deutlich abnimmt. Bei Überzügen über 100 mm sollte IRT nur als Screening-Werkzeug betrachtet werden, das eine umfassende Verifizierung durch Kettenzug, Impakt-Echo oder Bohrkernentnahme erfordert.
Drohnenflugstrategie für Brückenfahrbahnuntersuchungen
Eine typische Drone-IRT-Brückenfahrbahnuntersuchung folgt diesem Betriebsprotokoll:
Vorflugbewertung: Die Wetterbedingungen werden überprüft (Wind <24 km/h, Bewölkung <10 %, kein Niederschlag innerhalb ±2 Stunden des geplanten Untersuchungsfensters erwartet). Der Oberflächenzustand wird als trocken bestätigt (kein stehendes Wasser durch Regen oder Beregnungsanlagen). Die Solarstrahlung wird mit einem Pyranometer vor Ort gemessen – oder mit lokalen Wetterstationsdaten abgeglichen – um >600 W/m² zu bestätigen.
Flugmissionsplanung: Die Brückenfahrbahn wird in der Flugplanungssoftware (Pix4Dcapture, UgCS, DJI Pilot 2) kartiert. Flugparameter werden eingestellt: Höhe 30–50 m über Grund, Geschwindigkeit 3–5 m/s, 80 % Vorwärtsüberlappung, 70 % Seitenüberlappung, Kameraauslöseintervall 1–2 Sekunden. Der Flugpfad wird als parallele, zur Brückenlängsachse ausgerichtete Pässe entworfen, beginnend 10 m vor der Brückenauffahrt und endend 10 m hinter dem gegenüberliegenden Widerlager, um eine vollständige Abdeckung zu gewährleisten. Zusätzliche Pässe in schrägen Winkeln können für die Fahrbahnuntersicht-Inspektion programmiert werden.
Thermische Kalibrierung: Ein Referenztemperaturziel (kalibrierter Schwarzkörper bei Umgebungstemperatur) wird auf der Fahrbahn innerhalb des Untersuchungsgebiets für die radiometrische Feldvalidierung platziert. Einige Protokolle empfehlen, mehrere Referenzplatten mit bekannter Temperatur an verschiedenen Stellen über die Fahrbahn zu verteilen, um räumliche Temperaturgradienten zu erfassen.
Durchführung der Untersuchung: Die Drohne führt die autonome Flugmission aus, während der Bediener die Telemetrie (Batteriestand, Signalstärke, Kamerastatus, GPS-Genauigkeit) überwacht. Das Echtzeit-Thermovideo wird auf das Tablet des Bedieners übertragen, was die sofortige Identifizierung signifikanter thermischer Anomalien für vorläufige Feldnotizen ermöglicht.
Nachflugvalidierung: Unmittelbar nach der Landung wird ein tragbares radiometrisches Thermometer oder eine Wärmebildkamera verwendet, um die Oberflächentemperaturen an mehreren Bodenwahrheits-Punkten (offensichtliche Delaminationen, intakter Beton, bekannte Dehnungsfugen) zu überprüfen und zu bestätigen, dass die luftgestützten Thermo-Daten mit den Oberflächenmessungen übereinstimmen.
Studien, die Drone-IRT-Delaminationserkennung mit Kettenzug-Bodenwahrheit vergleichen (auf Betonfahrbahnen, wo Kettenzug wirksam ist), berichten über Erkennungswahrscheinlichkeiten von 75–90 % für Fehler >300 mm Durchmesser in Tiefen <75 mm, die auf 40–60 % für Fehler <200 mm oder >100 mm Tiefe abfallen. Die Falschpositivraten liegen bei 10–25 %, abhängig vom Oberflächenzustand und Umweltfaktoren.
Erkennung von Fahrbahn-Ablösungen und Feuchtigkeit
Asphaltfahrbahn-Ablösung
Ablösung in Asphaltfahrbahnen – der Verlust der Haftung zwischen Fahrbahnlagen (typischerweise zwischen einer Heißasphalt-Deck- und der darunterliegenden Asphalt- oder Betonbasis) – erzeugt eine horizontale Trennebene, die durch Drone IRT unter Verwendung desselben thermischen Isolationsmechanismus wie Betondelamination erkannt werden kann. Wenn sich ein Überzug ablöst: verhindert der Luftspalt die Abwärtsleitung von Wärme während der Sonneneinstrahlung und erzeugt einen heißen Oberflächenfleck; während der nächtlichen Abkühlung verhindert der Spalt, dass gespeicherte Wärme aufsteigt, und erzeugt eine warme Anomalie. Asphaltablösungen weisen jedoch einzigartige thermische Signaturen im Vergleich zu Betondelaminationen auf, aufgrund der höheren solaren Absorption von Asphalt (0,90–0,95 für gealterten Asphalt gegenüber 0,60–0,75 für Beton), der geringeren Wärmeleitfähigkeit (0,7–1,0 W/m·K gegenüber 1,7–2,5 W/m·K) und der geringeren thermischen Masse.
Die University of Nebraska-Lincoln und das Nebraska Department of Transportation führten umfassende Studien durch (Bericht M082, ROSAP DOT 61030), die drohnenmontierte IRT zur Erkennung von Hohlräumen und Zwischenschichtablösungen in Straßenfahrbahnen bewerteten. Die Ergebnisse zeigten eine zuverlässige Erkennung von Ablösungen in Tiefen bis zu 75–100 mm unter optimalen thermischen Bedingungen (klarer Sommernachmittag, Solarstrahlung >700 W/m², trockene Fahrbahnoberfläche). Die Studie ergab, dass abgelöste Asphaltüberzugsabschnitte Oberflächentemperaturerhöhungen von 1,5–4,0 °C gegenüber angrenzenden intakten Abschnitten aufwiesen – deutlich höher als die ΔT von Betondelaminationen aufgrund der höheren solaren Absorption von Asphalt.
Feuchtigkeitserkennung in Fahrbahnen
Feuchtigkeitsansammlungen in Fahrbahnen – Wasser, das innerhalb der Fahrbahnstruktur, an Schichtgrenzen oder unter der Fahrbahnschicht eingeschlossen ist – erzeugen eine thermische Signatur, die sich von luftgefüllten Hohlräumen oder Delaminationen unterscheidet. Wasser hat eine Wärmeleitfähigkeit von 0,6 W/m·K (etwa 23-mal höher als Luft, aber 3–4-mal niedriger als Beton) und eine volumetrische Wärmekapazität von 4,18 MJ/m³·K (etwa das 2-fache von Beton und das 3.000-fache von Luft). Diese Eigenschaften bedeuten:
Während der Sonneneinstrahlung: Ein feuchtigkeitsgefüllter Hohlraum leitet Wärme effizienter als ein luftgefüllter Hohlraum, daher erwärmt sich die Oberfläche über einem nassen Bereich langsamer als über einer trockenen Delamination – die Oberfläche kann während der Aufheizphase kühler erscheinen als die umgebende Fahrbahn (negativer thermischer Kontrast). Das Wasser absorbiert thermische Energie ohne proportionalen Temperaturanstieg aufgrund seiner hohen spezifischen Wärmekapazität (4.180 J/kg·K).
Während der nächtlichen Abkühlung: Das Wasser speichert Wärme und gibt sie langsamer ab als umgebende trockene Materialien, wodurch der nasse Bereich während der Abkühlungsphase wärmer erscheint (positiver Nachtkontrast). Diese nächtliche Signatur ist für die Feuchtigkeitserkennung oft zuverlässiger als Tagesuntersuchungen.
Verdunstungskühlung: Wenn sich die Feuchtigkeit nahe der Oberfläche befindet und Wasser verdunsten kann, kann die Verdunstungskühlung unabhängig vom täglichen Heizzyklus eine Kaltstelle von 2–5 °C unter der Umgebungstemperatur erzeugen – die eindeutigste thermische Signatur von oberflächennaher Feuchtigkeit.
Die Drone-IRT-Feuchtigkeitserkennung ist am effektivsten in Kombination mit GPR-Daten, die das Vorhandensein und die Tiefe von Wasser bestätigen. Die Nebraska-DOT-Studie ergab, dass kombinierte IRT + GPR-Drohnenuntersuchungen eine Genauigkeit von 88 % für die Feuchtigkeitserkennung in Fahrbahn-Untergrundschichten in Tiefen bis zu 150 mm erreichten, verglichen mit 62 % Genauigkeit für IRT allein.
Stripping in Asphaltmischungen
Stripping – der Verlust der Haftung zwischen Asphaltbindemittel und Gesteinskörnung in Heißasphalt durch Feuchtigkeitsschäden – erzeugt mikroskalige Enthaftungen, die einzeln möglicherweise keine nachweisbaren thermischen Anomalien erzeugen. Wenn Stripping jedoch ein erhebliches Volumen der Mischung betrifft (typischerweise >25 % der Fahrbahnfläche in einer bestimmten Tiefe), zeigt die betroffene Fahrbahn veränderte thermische Eigenschaften – geringere Wärmeleitfähigkeit (aufgrund von Luftporen durch Binder-Gesteinskörnung-Trennung) und höhere Feuchtigkeitsspeicherung. Drone IRT kann diese thermisch veränderten Zonen als Bereiche mit verzögerter thermischer Antwort erkennen – sie erwärmen sich tagsüber schneller (aufgrund von Luftporen), können aber bei gleichzeitiger Feuchtigkeit eine weniger ausgeprägte Tageserwärmung zeigen. Die Erkennung von Stripping erfordert eine sorgfältige multitemporale Analyse, die die Aufheiz- und Abkühlraten verdächtiger Bereiche mit bekannten intakten Fahrbahnabschnitten vergleicht, da die thermische Signatur subtil ist (ΔT typischerweise 0,5–1,0 °C) und leicht durch Variationen des Oberflächenemissionsgrades überdeckt wird.
Integration mit visueller RGB-Inspektion
Koregistrierte Thermo- und Bilddaten
Moderne Drone-IRT-Nutzlasten erfassen koregistrierte Wärme- und RGB-Bilder – das bedeutet, jedes Wärmebild hat ein entsprechendes RGB-Bild (sichtbares Spektrum), das von derselben Kameraposition und Ausrichtung aufgenommen wurde, mit bekannter geometrischer Transformation zwischen den beiden Sensoren. Die DJI Zenmuse H20T erreicht dies, indem der Wärmesensor, der Weitwinkel-RGB-Sensor und der Tele-RGB-Sensor auf einer gemeinsamen optischen Bank innerhalb des Gimbal-Gehäuses montiert sind, die werkseitig so kalibriert sind, dass die Pixel jedes Sensors auf bekannte Bodenkoordinaten abgebildet werden. Diese Koregistrierung ermöglicht:
Geteilte Bildschirmansicht: Der Bediener oder Analyst kann das Wärmebild und das entsprechende RGB-Bild nebeneinander betrachten und den sichtbaren Kontext zur Interpretation thermischer Anomalien nutzen – ist dieser heiße Fleck eine Delamination oder ein Ölfleck? Das RGB-Bild zeigt Oberflächenmerkmale, die im Wärmebild unsichtbar sind.
Bildfusion: Thermo-Daten (in Falschfarben) werden mittels Alpha-Blending halbtransparent über das RGB-Bild gelegt, wodurch ein einzelnes kombiniertes Bild entsteht, bei dem der visuelle Kontext unter der Überlagerung der thermischen Anomalie sichtbar ist. Dieses Produkt ist für Brückeningenieure und Inspektionsberichtsleser deutlich besser interpretierbar als rohe Thermogramme.
Multispektrale Analyse: Das KI-Erkennungsmodell erhält sowohl thermische als auch RGB-Kanäle als Eingabe und lernt, thermische Anomalie-Muster mit sichtbaren Oberflächenmerkmalen zu assoziieren. Diese multispektrale Eingabe reduziert die Falschpositivraten, indem das Modell erkennen kann, dass ein kreisförmiger heißer Fleck mit dunkler Verfärbung im RGB-Kanal wahrscheinlich ein Ölfleck ist, während ein heißer Fleck ohne sichtbares Oberflächenmerkmal wahrscheinlich eine oberflächennahe Delamination ist.
Vergleichende Fehlerkartierung
Die Integration von Drone-IRT-Daten mit visuellen RGB-Inspektionsdaten ermöglicht eine vergleichende Fehlerkartierung – das Überlagern thermischer Anomalie-Polygone auf der visuellen Inspektionsfehlerkarte, um Beziehungen zwischen sichtbaren Oberflächenfehlern (Risse, Abplatzungen, Ausbesserungen) und oberflächennahen Fehlern (Delamination, Ablösungen) zu identifizieren. Die Wisconsin-DOT/AECOM-Studie von 2024 zeigte, dass der Vergleich von Drone-IRT-Thermoanomalie-Karten mit gleichzeitigen RGB-Risskarten ergab, dass 68 % der thermischen Anomalien Bereichen mit sichtbarer Rissbildung entsprachen, während 32 % Delaminationen ohne Oberflächenausdruck darstellten – der gefährlichste Typ, da er allein durch visuelle Inspektion nicht erkannt werden kann. Umgekehrt zeigten 23 % der Bereiche mit Oberflächenrissen keine thermische Anomalie, was auf eine reine Oberflächenverschlechterung ohne oberflächennahe Delamination hindeutet – Bereiche, die möglicherweise keine strukturelle Reparatur erfordern.
TarmacView-Integration
Die visuelle Inspektionsplattform von TarmacView kann Drone-IRT-Thermoorthomosaike als zusätzliche Datenebenen innerhalb der Brückeninspektionsdatenbank aufnehmen. Thermische Anomalie-Polygone – erzeugt durch KI-Analyse des Thermomosaiks und exportiert als GeoJSON- oder Shapefile-Format – werden als überlagerte Fehlerebenen importiert. Jede thermische Anomalie trägt Attribute: ΔT (Temperaturdifferenz in °C), Fläche (m²), Schwerpunktkoordinaten (Breitengrad, Längengrad in NAD83 oder WGS84), Erkennungssicherheit (aus der KI-Modellausgabe), Schweregradklassifizierung (basierend auf ΔT-Schwellenwerten) und den Dateinamen des Quellwärmebildes für die Rückverfolgbarkeit. Die TarmacView-Oberfläche ermöglicht Prüfern:
Abfrage thermischer Anomalien: Klicken Sie auf ein beliebiges thermisches Anomalie-Polygon, um dessen Temperaturdifferenz, den rohen Wärmebildausschnitt, das entsprechende RGB-Bild und alle visuellen Inspektionsdaten (Risskarten, Abplatzungsbereiche, Ausbesserungsaufzeichnungen) an dieser Stelle anzuzeigen.
Zeitlicher Vergleich: Überlagern Sie thermische Untersuchungen aus verschiedenen Jahren, um die Delaminationsausbreitung zu verfolgen – eine Delamination, die zwischen den Untersuchungen 2024 und 2025 von 0,3 m² auf 1,2 m² angewachsen ist, weist eindeutig auf aktiven Verfall hin, der ein Eingreifen erfordert.
Multimethoden-Korrelation: Vergleichen Sie Drone-IRT-Thermoanomalien mit Bodenwahrheitsdaten aus Ultraschalltomographie, Hammerklangproben oder Bohrkernen, die an den markierten Stellen entnommen wurden, und bauen Sie eine Kalibrierungsdatenbank auf, die die zukünftige Erkennungsmodellgenauigkeit verbessert.
Drone IRT vs. Fahrzeug-IRT
Vergleich der Abdeckungsgeschwindigkeit
Fahrzeugmontierte IRT (gemäß ASTM D4788) und drohnenmontierte IRT unterscheiden sich grundlegend in der Untersuchungsgeschwindigkeit und Flächenabdeckungsrate. Fahrzeugsysteme sind für den Hochgeschwindigkeitsverkehr ausgelegt – sie erfassen Wärmebilder bei Fahrgeschwindigkeiten von 80–113 km/h (50–70 mph) mit einer Streifenbreite von etwa 4,6 m (15 Fuß) pro Überfahrt. Eine standardmäßige zweispurige Brückenfahrbahn (30 m Länge × 12 m Breite = 360 m²) kann in einem einzigen 30-Sekunden-Durchgang bei 60 mph abgedeckt werden, wobei zwei zusätzliche Durchgänge für die Gegenfahrbahn und die Seitenstreifen insgesamt etwa 3 Minuten Fahrbahn-Untersuchungszeit hinzufügen. Inklusive Einrichtung, Anfahrt/Abfahrt und einem zusätzlichen Abkühl-Durchgang dauert die gesamte Fahrbahnuntersuchung 5–10 Minuten – abgeschlossen ohne Verkehrsbehinderung, da sich das Untersuchungsfahrzeug mit dem normalen Verkehrsfluss bewegt.
Drone IRT deckt dieselbe Brückenfahrbahn mit einer deutlich langsameren Geschwindigkeit ab. Bei einer Untersuchungshöhe von 40 m (was ~3,5 cm GSD liefert) beträgt die Wärmebild-Streifenbreite etwa 16 m. Bei 70 % Seitenüberlappung beträgt die effektive Abdeckungsstreifenbreite pro Fluglinie 4,8 m. Für dieselbe 12 m breite Fahrbahn sind 3 Fluglinien erforderlich. Bei einer Fluggeschwindigkeit von 5 m/s über 35 m pro Durchgang (einschließlich Puffer jenseits beider Enden) dauert jeder Durchgang 7 Sekunden. Drei Durchgänge plus Wenden, Höhenstabilisierung und Systemchecks entsprechen etwa 3–5 Minuten für die Fahrbahn-Datenerfassung – vergleichbar mit Fahrzeuggeschwindigkeit für diese kleine Fläche. Die Drohne muss jedoch eingesetzt, die Batterien überprüft, die Vorflugkontrollen durchgeführt und der Startpunkt eingerichtet werden, bevor die Untersuchung beginnt. Bei großflächigen Fahrbahnuntersuchungen (z. B. 1 km × 8 m Startbahn) verschiebt sich der Vergleich dramatisch: Fahrzeug-IRT deckt 1 km in 30–40 Sekunden bei 60 mph ab; Drone IRT bei 5 m/s mit 4,8 m effektiver Streifenbreite erfordert 11 Fluglinien zu je 200 Sekunden = 2.200 Sekunden = 37 Minuten Flugzeit, was 2–3 Batteriewechsel erfordert.
Metrik
Drone IRT
Fahrzeug-IRT
Untersuchungsgeschwindigkeit
3–8 m/s (10–28 km/h)
22–31 m/s (80–113 km/h)
Streifenbreite
12–20 m (abhängig von der Höhe)
4,6 m (fest)
Abdeckungsrate
~475 m²/Stunde
~18.000 m²/Stunde
Typische Fahrbahn-Untersuchungszeit
15–30 Min. (inkl. Einrichtung)
5–10 Min. (ab Anrollen)
Abdeckbare Fläche pro Schicht
~15.000 m²
~50.000 m²
Verkehrsbehinderung
Keine
Keine
Notwendigkeit des Brückenzugangs von unten
Nein
Nein
Zugangsvorteil von Drone IRT
Der primäre Vorteil von Drone IRT gegenüber Fahrzeug-IRT ist der Zugang zu Brückenelementen jenseits der Fahrbahnoberfläche. Drohnen können inspizieren:
Fahrbahnuntersichten: Die Unterseite von Brückenfahrbahnen – entscheidend für die Erkennung von Abplatzungen und Delaminationen, die von der Oberseite möglicherweise noch nicht sichtbar sind. Drohnen fliegen unter der Brücke und verwenden nach oben gerichtete oder schräge Kamerawinkel, um Thermo-Daten von der Untersicht zu erfassen. Die thermische Herausforderung: Die Fahrbahnuntersicht erhält keine direkte Sonnenstrahlung, daher muss der passive thermische Kontrast aus der Wärmeleitung durch die Fahrbahnplattendicke kommen – was Tagesuntersuchungen erfordert, wenn die Oberseite erwärmt ist und der Wärmegradient durch die Fahrbahn propagiert. Aktive Thermographie mit zusätzlicher Beleuchtung kann für beschattete Untersichten erforderlich sein.
Vertikale Elemente: Brückenpfeiler, Pfeilerköpfe, Widerlagerwände, Stielwände, Flügelwände und Stützwände können mit der Drohne inspiziert werden, die in einem Sicherheitsabstand von 5–15 m neben dem Element fliegt. Die Wärmebildkamera wird horizontal (oder leicht nach unten geneigt) ausgerichtet, um die vertikale Oberfläche zu erfassen. Die Sonneneinstrahlung auf vertikalen Oberflächen ist weniger intensiv als auf horizontalen Fahrbahnen (Kosinus des Winkels zwischen Sonne und Oberflächennormale), daher erfordert die Thermographie vertikaler Elemente Untersuchungen zur Mittagszeit, wenn der Sonnenwinkel am höchsten ist.
Eingeschränkte Räume: Drone IRT kann unter Brückenbereiche, Durchlassinnenseiten, Tunnelauskleidungen und beengte Bauteile inspizieren, die für fahrzeugmontierte Systeme unzugänglich sind und für deren bemannte Inspektion Gerüste, Brückenuntersichtfahrzeuge (Snooper-Trucks) oder Seilzugang erforderlich wären.
Brücken über Hindernissen: Drohnen können Brücken über Wasser, tiefen Tälern, ökologisch sensiblen Feuchtgebieten, aktiven Eisenbahnen oder innerstädtischen Schluchten inspizieren, wo Fahrzeugzugang für Fahrbahn-Scanning unmöglich ist. Die Drohne operiert von einem sicheren Startpunkt außerhalb des Hindernisbereichs und führt die gesamte Inspektionsmission autonom durch.
Kostenvergleich
Die Studie der University of Nebraska-Lincoln und des Nebraska DOT lieferte detaillierte Kostenvergleiche für qualitätsbezogene Fehleridentifikationsmethoden (QRDI). Drone IRT erreichte Kosten von etwa 0,65 $ pro Quadratmeter ($0,06 pro Quadratfuß), verglichen mit 1,60–3,25 $ pro Quadratmeter ($0,15–$0,30 pro Quadratfuß) für Fahrzeug-IRT inklusive Mobilisierung und Datenverarbeitung. Kettenzug – die Basislinienmethode – kostet 6,50–10,75 $ pro Quadratmeter ($0,60–$1,00 pro Quadratfuß), erfordert aber Fahrspursperrungen und mehrere Prüfer. Der Kostenvorteil von Drone IRT wird für Brücken in abgelegenen Lagen oder über Hindernissen, wo der Fahrzeugzugang umfangreiche Standortvorbereitung erfordern würde, signifikanter. Fahrzeug-IRT behält jedoch einen Kosten-vorteil pro Fläche für große, leicht zugängliche Brückenfahrbahnen, wo eine Hochgeschwindigkeits-Datenerfassung möglich ist. Die optimale Strategie aus Kostensicht: Fahrzeug-IRT für schnelles Fahrbahn-Screening zugänglicher Brücken, Drone IRT für Brücken mit Zugangsherausforderungen, vertikale Elemente, Untersichten und gezielte Nachverfolgung von Anomalien aus der Fahrzeuguntersuchung.
Regulatorische Aspekte
FAA Part 107 für Drohnen-Thermographie
In den USA unterliegen gewerbliche Drone-IRT-Einsätze FAA Part 107 (Code of Federal Regulations Titel 14, Kapitel I, Unterkapitel F, Teil 107) – Small Unmanned Aircraft Systems. Wichtige Anforderungen, die für Thermographie-Einsätze gelten:
Remote-Pilot-Zertifikat: Der Drohnenpilot muss ein von der FAA ausgestelltes Remote-Pilot-Zertifikat besitzen, das durch Bestehen der aeronautischen Wissensprüfung (Part 107 Erstprüfung) und Absolvieren einer wiederkehrenden Wissensprüfung alle 24 Monate erworben wird. Das Zertifikat erfordert ein Mindestalter von 16 Jahren und eine TSA-Sicherheitsüberprüfung.
Luftfahrzeugregistrierung: Die Drohne muss bei der FAA registriert sein, wenn sie mehr als 250 g (0,55 lb) wiegt. Alle für die Brückenthermographie verwendeten Drohnen überschreiten diesen Schwellenwert. Die Registrierung kostet 5 $ und ist 3 Jahre gültig. Die Registrierungsnummer muss am Luftfahrzeug angebracht sein.
VLOS-Anforderung: Die Drohne muss innerhalb der Sichtverbindung (VLOS) des Piloten oder eines visuellen Beobachters betrieben werden – das bedeutet, das Luftfahrzeug muss jederzeit ohne Fernglas sichtbar sein. Für Brückenfahrbahnuntersuchungen schränkt dies die kontinuierliche Inspektionsreichweite auf etwa 400–500 m von der Pilotenstation ein. Große Brückenfahrbahnen (z. B. die 1.200 m lange Chesapeake Bay Bridge) erfordern eine Neupositionierung der Pilotenstation entlang der Fahrbahn oder den Einsatz mehrerer visueller Beobachter.
Maximale Höhe: 120 m (400 ft) über Grund, es sei denn, die Drohne befindet sich innerhalb von 120 m (400 ft) eines Bauwerks, in diesem Fall darf die Höhe die 120 m über Grund um bis zu 120 m über der Bauwerksspitze überschreiten. Dies ist für Brückenfahrbahnuntersuchungen ausreichend (typischerweise 30–60 m über Grund), kann aber die Inspektion der Spitzen sehr hoher Brückentürme einschränken.
Tageslichtbetrieb: Part 107 beschränkte den Betrieb historisch auf Tageslichtstunden (30 Minuten vor offiziellem Sonnenaufgang bis 30 Minuten nach offiziellem Sonnenuntergang). Die Nachtbetriebsregel von 2021 für Part 107 erlaubt Nachtflüge ohne Ausnahmegenehmigung, sofern die Drohne über eine in 4,8 km (3 statute miles) sichtbare Kollisionswarnbeleuchtung verfügt und der Pilot eine aktualisierte wiederkehrende Schulung zu Nachtoperationen absolviert hat. Dies ist für die Thermographie von Bedeutung, da Nachtuntersuchungen für bestimmte Fehlertypen oft einen überlegenen thermischen Kontrast bieten.
Überflug über Personen: Part 107 verbietet im Allgemeinen den Überflug über Personen, die nicht direkt an der Operation beteiligt sind, es sei denn, die Drohne erfüllt spezifische Gewichts- und Sicherheitsanforderungen (Kategorie 1–4). Bei Brückenthermographie über aktiven Fahrbahnen mit darunterliegendem Verkehr fliegt die Drohne nicht über Fahrzeuge (die Fahrbahnoberfläche befindet sich bei typischen Untersuchungshöhen oberhalb der Drohne), jedoch können Einsätze über bewohnten Gebieten in der Nähe von Brückenauffahrten die Einhaltung der Überflugbestimmungen erfordern.
BVLOS und Sondergenehmigungen
Operationen außerhalb der Sichtverbindung (BVLOS) – bei denen die Drohne über die ununterstützte Sichtweite des Piloten hinausfliegt – sind für Drone-IRT-Inspektionen langer Fahrbahnabschnitte (Autobahnabschnitte, Startbahnen) oder großer Brückenfahrbahnen relevant, wo eine kontinuierliche VLOS-Abdeckung unpraktisch ist. FAA-BVLOS-Ausnahmegenehmigungen (Part 107.31) erfordern einen detaillierten Sicherheitsnachweis, der eine gleichwertige oder höhere Sicherheit als VLOS-Operationen belegt. Der Sicherheitsnachweis muss Fähigkeiten zur Erkennung und Vermeidung (Radar, ADS-B oder elektrooptische Sensoren zur Erkennung anderer Luftfahrzeuge), zuverlässige C2-Verbindung (mit Latenz- und Redundanzspezifikationen), Verbindungsverlustverfahren (ausfallsicheres Verhalten: Rückkehr zum Startpunkt, Schweben oder Missionsfortsetzung) und Luftraumüberwachung adressieren. Stand 2025 hat die FAA mehreren Drohneninspektionsbetreibern BVLOS-Ausnahmegenehmigungen für Infrastrukturinspektionen erteilt, der Genehmigungsprozess bleibt jedoch Einzelfallabhängig und kann 60–120 Tage für die Genehmigung benötigen.
Für Drone-IRT-Einsätze in der Nähe von Flughäfen oder in kontrolliertem Luftraum (Klasse B, C, D oder E Bodenflächen) müssen Betreiber eine Luftraumgenehmigung über das LAANC-System (Low Altitude Authorization and Notification Capability) der FAA einholen. LAANC bietet nahezu Echtzeit-Genehmigungen für Part-107-Einsätze in kontrolliertem Luftraum bis zu 120 m über Grund. Die meisten Brückenfahrbahnen in städtischen Gebieten liegen in kontrolliertem Luftraum, und LAANC-Genehmigungen sind für Standardeinsätze während der Tageslichtstunden typischerweise innerhalb von Minuten erhältlich. Nachtoperationen in kontrolliertem Luftraum erfordern eine manuelle Koordination mit der Flugsicherungsstelle.
Internationale Regulierungsrahmen
Die Internationale Zivilluftfahrtorganisation (ICAO) bietet den übergeordneten Regulierungsrahmen durch ICAO Circular 328 (Unmanned Aircraft Systems, 2011) und die ICAO Model UAS Regulations (2020). Circular 328 legte die grundlegenden Prinzipien der UAS-Regulierung fest – einschließlich des Konzepts, dass UAS mit einem äquivalenten Sicherheitsniveau wie bemannte Luftfahrzeuge betrieben werden müssen. Die Model UAS Regulations bieten einen Rahmen für nationale Regulierungsbehörden zur Übernahme, der Luftfahrzeugregistrierung, Betreiberzertifizierung, Betriebsbeschränkungen und Luftraumintegration abdeckt. ICAO Annex 6, Teil IV (2022) enthält Standards und empfohlene Praktiken (SARPs) für internationale RPAS-Operationen.
Die Europäische Agentur für Flugsicherheit (EASA) Verordnung 2019/947 stuft UAS-Operationen basierend auf dem Risiko in drei Kategorien ein: Open (niedriges Risiko, <25 kg, VLOS, <400 ft, keine Genehmigung erforderlich, aber Betriebsbeschränkungen), Specific (erhöhtes Risiko, erfordert Betriebsgenehmigung der nationalen Luftfahrtbehörde basierend auf einer SORA-Risikobewertung) und Certified (entspricht Anforderungen für bemannte Luftfahrzeuge, für Einsätze über Menschenansammlungen, Personentransport oder Gefahrgüter). Drone IRT für die Infrastrukturinspektion fällt typischerweise in die Specific-Kategorie und erfordert, dass der Betreiber eine SORA (Specific Operations Risk Assessment) einreicht oder eine vordefinierte Risikobewertungserklärung (PDRA) einholt. Die EASA hat Standardszenarien (STS-01 und STS-02 für VLOS-Operationen in der Specific-Kategorie) veröffentlicht, die den Genehmigungsprozess vereinfachen.
Region
Vorschrift
Wichtige Anforderungen für Drone IRT
USA
FAA Part 107
Remote-Pilot-Zertifikat, Registrierung, VLOS, 120 m über Grund, Nachtbetrieb (mit Beleuchtung)
Registrierung erforderlich (100g+), Betriebsgenehmigungen für spezifischen Luftraum
Nachtflugbetrieb
Nächtliche Drone-IRT-Untersuchungen werden zunehmend üblich, da sie inversen thermischen Kontrast bieten – Delaminationen erscheinen als warme Anomalien gegen kühleren intakten Beton – und Schattenartefakte, Verkehrsblendung und thermische Reflexionen von benachbarten Bauwerken vermeiden. FAA-Vorschriften für Part-107-Nachtbetrieb (wirksam ab April 2021) erfordern:
Kollisionswarnbeleuchtung: Die Drohne muss ein Kollisionswarnlicht haben, das in 4,8 km (3 statute miles) sichtbar ist. Das Licht muss blinkend oder strobo-skopisch sein und kann entweder die integrierten Navigationslichter der Drohne oder ein zusätzlicher LED-Blitz sein. Dies dient hauptsächlich der Kollisionsvermeidung mit bemannten Luftfahrzeugen.
Wiederkehrende Schulung: Der Pilot muss eine aktualisierte wiederkehrende Schulung absolvieren, die Nachtoperationen abdeckt, einschließlich physiologischer Faktoren (Nachtsicht, räumliche Desorientierung), Beleuchtungsanforderungen und betrieblicher Aspekte.
VLOS-Anforderung: Nachtoperationen unterliegen weiterhin VLOS – die Drohne muss für den Piloten jederzeit sichtbar sein. Dies erfordert eine Drohne mit ausreichender Beleuchtung oder den Einsatz eines visuellen Beobachters mit Nachtsichtgerät.
Nächtliche Thermountersuchungen stellen zusätzliche betriebliche Herausforderungen dar: eingeschränktes Situationsbewusstsein (Schwierigkeiten beim Erkennen von Hindernissen wie Brückengeländern und Abspannseilen), keine visuelle Referenz für die Tiefenwahrnehmung, niedrigere Temperaturen, die die Batterieleistung reduzieren (Batteriekapazität sinkt bei kaltem Wetter um 10–20 %), und mögliche Kondensation auf der Wärmebildkamera-Linse. Die thermische Datenqualität ist jedoch oft der von Tagesdaten überlegen – der thermische Kontrast kann 1,5–4,0 °C erreichen (verglichen mit 1,0–3,0 °C tagsüber), und Sonnenreflexionsartefakte (Spiegelung auf Fahrzeugscheiben, Sonnenblendung auf nasser Fahrbahn) treten nicht auf.
Drone-IRT-Inspektionsergebnisse werden als umfassendes Inspektionsberichtspaket geliefert, das georeferenzierte Thermo-Datenprodukte, erkannte Anomaliedatenbanken, Schweregradklassifizierungen und Empfehlungen umfasst. Standard-Liefergegenstände umfassen:
Thermisches Orthomosaik (GeoTIFF): Ein georeferenziertes Wärmebild der gesamten inspizierten Oberfläche als Einzeldatei, wobei jedes Pixel einen kalibrierten Temperaturwert speichert (32-Bit-Gleitkomma, Einheiten °C oder K). Das GeoTIFF enthält eine eingebettete CRS-Definition (Koordinatenreferenzsystem) – typischerweise NAD83 (2011) für US-Bundesstaatenebene-Koordinaten oder WGS84 für Breiten-/Längengrad. Die räumliche Auflösung entspricht dem Bodenabtastabstand der Untersuchung (typischerweise 3–5 cm).
Thermische Anomaliekarte (GeoJSON oder Shapefile): Polygone, die jede erkannte thermische Anomalie abgrenzen, mit Attributen: Anomalie-ID, ΔT (°C), Fläche (m²), Umfang (m), Schwerpunktkoordinaten, Erkennungssicherheit (Skala 0–1 aus KI-Modell), Schweregradklassifizierung, Inspektionsdatum und Quelldatenreferenz.
Fehler-Schweregradklassifizierung folgt dem weit verbreiteten FHWA/NACE-System, angepasst für thermische Anomalien:
Schweregrad
ΔT-Bereich
Erforderliche Maßnahme
Beispielbereich
Niedrig (überwachen)
0,5–1,0 °C
In nächsten Routine-Inspektionszyklus einbeziehen
Kleine, flache Delamination
Mittel
1,0–3,0 °C
Reparatur innerhalb von 1–2 Jahren planen
Typische Delamination, 0,5–1 m²
Hoch
3,0–10,0 °C
Reparatur innerhalb von 6 Monaten
Große Delamination, strukturelle Bedenken
Kritisch
>10,0 °C
Sofortige Reparaturmaßnahme
Aktive Abplatzung, Sicherheitsgefahr
RGB-Orthomosaik (GeoTIFF): Hochauflösendes visuelles Bild des inspizierten Bereichs, georeferenziert und für die Überlagerungsvisualisierung auf das Thermomosaik ausgerichtet.
Interaktiver Web-Viewer: Viele Untersuchungsanbieter liefern Ergebnisse über webbasierte GIS-Plattformen (ArcGIS Online, Cesium, Potree), auf denen Prüfer zwischen thermischen und RGB-Ebenen umschalten, zu einzelnen Anomalien zoomen, Attributdaten anzeigen und Entfernungen oder Flächen messen können. Der interaktive Viewer ermöglicht es Brückeningenieuren, jede Position auf der Brücke abzufragen und die Oberflächentemperatur zum Zeitpunkt der Untersuchung abzurufen.
Standards für die Anomaliedokumentation
Jede erkannte thermische Anomalie sollte mit ausreichenden Details für Nachfolgeinspektion, Reparaturplanung und langfristige Zustandsüberwachung dokumentiert werden. Das AASHTO Manual for Bridge Element Inspection (Handbuch der American Association of State Highway and Transportation Officials für die Brückenelementinspektion) bietet den Rahmen für die Fehlerdokumentation. Für thermische Anomalien umfasst die Dokumentation:
Standort: GPS-Koordinaten (Breitengrad, Längengrad, Höhe), Brückenelement (Fahrbahn, Untersicht, Träger, Pfeiler) und strukturspezifische Referenz (Trägerlinie, Feldnummer, Stationsnummer basierend auf Brückenplänen).
Geometrie: Länge, Breite, Fläche und Orientierung (relativ zur Brückenlängsachse). Für unregelmäßige Anomalien werden der minimale Begrenzungsrahmen und das konvexe Hüllpolygon aufgezeichnet.
Temperaturdaten: Maximale Oberflächentemperatur innerhalb der Anomalie, Mindesttemperatur, ΔT relativ zu angrenzendem intaktem Material (mittlere Temperatur einer 1 m Pufferzone um die Anomalie) und der Temperaturgradient (ΔT/Entfernung) an der Anomaliegrenze – scharfe Gradienten weisen auf ausgeprägte Fehlerkanten hin.
Vertrauensniveau: Basierend auf KI-Erkennungsausgabe und Analystenprüfung: Hoch (eindeutige thermische Signatur, durch RGB-Kontext bestätigt, ΔT > 2 °C), Mittel (mäßige Signatur, gewisse Mehrdeutigkeit, ΔT 1–2 °C) oder Niedrig (subtile Signatur, mögliches Falschpositiv, ΔT 0,5–1,0 °C) – erfordert Verifizierung durch eine andere ZfP-Methode.
Empfohlene Maßnahme: Spezifische Empfehlung für jede Anomalie: überwachen, durch UT/Klangprüfung verifizieren, Bohrkern entnehmen, Reparatur planen oder sofortige Reparatur.
Qualitätssicherung und Verifizierung
Der Drone-IRT-Inspektionsbericht muss eine Qualitätssicherungsdokumentation enthalten, die die Genauigkeit und Zuverlässigkeit der Daten nachweist. Das QA/QC-Paket sollte Folgendes umfassen:
Kalibrierzertifikate: Aktuelle (innerhalb von 12 Monaten) Kalibrierzertifikate für die Wärmebildkamera, rückführbar auf NIST oder ein gleichwertiges nationales Metrologieinstitut. Das Kalibrierdokument legt die Genauigkeit der Kamera (typischerweise ±2 °C oder ±2 %) und die NETD (≤50 mK) fest.
Bodenwahrheits-Verifizierung: Temperaturmessungen, die an 3–5 Bodenwahrheits-Punkten über das untersuchte Gebiet hinweg mit einem kalibrierten Kontaktthermometer (Typ-K-Thermoelement oder Oberflächenfühler) oder einem kalibrierten Radiometer gesammelt wurden. Die Differenz zwischen Luft- und Bodentemperaturen sollte dokumentiert werden; Abweichungen über 2 °C sollten untersucht werden.
GSD-Verifizierung: Der tatsächliche GSD wird durch Messen bekannter Abmessungen im thermischen Orthomosaik (Dehnungsfugenabstand, Fahrstreifenbreite, bekannte Strukturabmessungen) und Vergleich mit dem nominellen Untersuchungsdesign-GSD verifiziert.
Positionsgenauigkeit: Die RTK-GPS-Genauigkeit wird durch Vergleich der gemessenen Koordinaten von 3–5 Bodenkontrollpunkten (mit Totalstation oder RTK-Rover vermessen) mit ihren aus dem thermischen Orthomosaik gemessenen Koordinaten verifiziert. Der mittlere quadratische Fehler (RMSE) sollte <10 cm horizontal und <15 cm vertikal betragen.
Erkennungsvalidierung: Für Brücken, an denen zerstörende Prüfungen oder andere ZfP-Verfahren durchgeführt werden, wird eine Konfusionsmatrix erstellt, die IRT-erkannte Anomalien mit verifizierten Fehlern vergleicht. Metriken umfassen True-Positive-Rate (Recall), False-Positive-Rate, Präzision und F1-Score. Diese Metriken werden für die Gesamtuntersuchung sowie aufgeschlüsselt nach Schweregrad und Fehlertiefe berichtet.
Integration mit Brückenmanagementsystemen (BMS)
Das ultimative Ergebnis einer Drone-IRT-Inspektion sind nicht die Thermo-Daten selbst, sondern die Integration der thermischen Anomaliedaten in das Brückenmanagementsystem (BMS), das die Instandhaltungsplanung, Reparaturpriorisierung und Budgetzuweisung steuert. Die meisten staatlichen Straßenbauverwaltungen (DOTs) in den USA verwenden AASHTOWare Bridge Management oder Pontis-basierte BMS-Plattformen. Drone-IRT-Anomaliedaten fließen über folgende Wege in diese Systeme ein:
Zustandszuweisung: Jedes Brückenelement erhält einen Zustand (Skala 1–4 gemäß AASHTO Manual for Bridge Element Inspection) basierend auf dem Umfang und der Schwere der erkannten Fehler. Beispielsweise würde eine Brückenfahrbahn mit <2 % Delaminationsfläche (ermittelt aus Drone-IRT-Thermoanomalie-Fläche geteilt durch Gesamtfahrbahnfläche) den Zustand 1 (Gut) erhalten; 2–10 % Delamination = Zustand 2 (Befriedigend); 10–25 % = Zustand 3 (Schlecht); >25 % = Zustand 4 (Schwerwiegend).
Verfallmodellierung: Der Vergleich aufeinanderfolgender Drone-IRT-Untersuchungen ermöglicht die Entwicklung von Verfallskurven auf Elementebene – die Geschwindigkeit des Delaminationsflächenwachstums über die Zeit. Eine Fahrbahn, die eine Delaminationsausbreitung von 5 % auf 12 % über 3 Jahre zeigt, deutet auf einen beschleunigten Verfall hin, der innerhalb von 1–2 Jahren ein Eingreifen erfordert, um den Zustand 4 zu verhindern.
Reparaturpriorisierung: Thermischer Anomalie-Schweregrad, -Ausmaß und -Lage werden mit anderen Brückeninspektionsdaten (Tragfähigkeit, durchschnittlicher täglicher Verkehr (ADT), Kolkzustand, Status bruchkritischer Bauteile) integriert, um eine numerische Prioritätsbewertung für jede Reparaturmaßnahme zu erzeugen. Drohnen ermöglichen diese Multi-Datenquellen-Integration, indem sie eine georeferenzierte, quantifizierte Fehlerdatenbank bereitstellen, die direkt in das BMS eingespeist werden kann.
Häufig gestellte Fragen
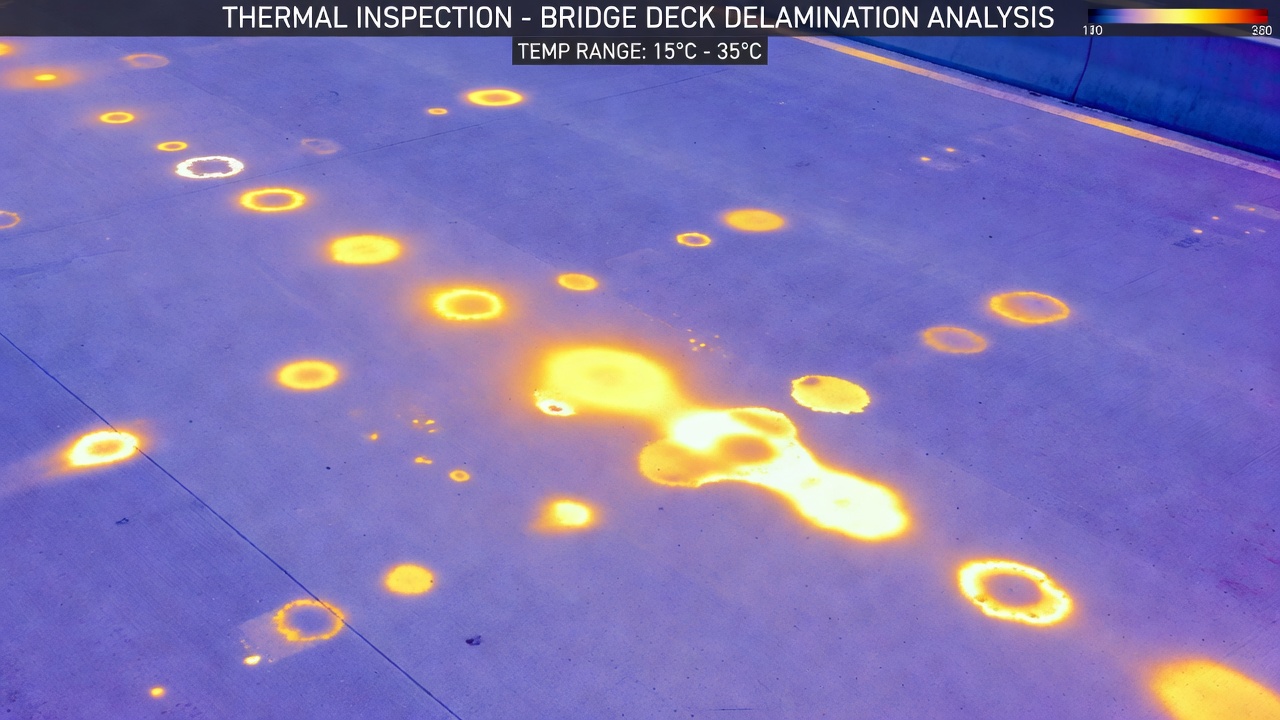
Drohnen-basierte Infrarot-Thermographie (Drone IRT) ist eine zerstörungsfreie Prüfmethode (ZfP), bei der eine Wärmebildkamera auf einem unbemannten Luftfahrzeug (UAV) montiert wird, um oberflächennahe Fehler in Brückenfahrbahnen, Fahrbahnbelägen und Betonkonstruktionen zu erkennen. Die Drohne fliegt über die Zieloberfläche, während die Wärmebildkamera Oberflächentemperaturschwankungen aufzeichnet. Oberflächennahe Fehler – Delaminationen, Ablösungen, Hohlräume und Feuchtigkeitsnester – haben andere thermische Eigenschaften als intaktes Material. Während der Sonneneinstrahlung wirken luftgefüllte Spalte (Delaminationen) als thermische Isolierung, wodurch die Oberfläche über dem Fehler schneller erwärmt wird und 0,5–3 °C wärmer wird als der umgebende intakte Beton. Die Wärmebildkamera erfasst diese Temperaturdifferenzen als thermische Anomalien, die in Falschfarben-Thermogrammen sichtbar sind. Drone IRT ermöglicht die Inspektion von Brückenfahrbahnen, Pfeilerköpfen, Widerlagern, Fahrbahnabschnitten und erhöhten Bauwerken ohne Verkehrssperrung, Gerüste oder Untersichtzugangsgeräte.
Typische Drone-IRT-Nutzlasten verwenden ungekühlte Mikrobolometer-LWIR-Kameras im Spektralbereich 7,5–14 µm. Gängige Modelle sind die DJI Zenmuse H20T (640×512 Auflösung, 12 µm Pixelpitch, ≤50 mK NETD, f/1,0, ±2°C Genauigkeit, ~12.000 $), FLIR Vue Pro R (640×512, 12 µm, <50 mK NETD, 9 mm oder 13 mm Objektivoptionen, radiometrische Kalibrierung, ~6.000–9.000 $) und Workswell WIRIS Pro (640×512, 30 mK NETD, 10× optischer Zoom, Temperaturmessbereich bis 1500 °C, integrierte Datenaufzeichnung). Diese Kameras müssen bei typischen Multikopter-Nutzlastgrenzen unter 500 g wiegen und auf einem 3-achs-stabilisierten Gimbal montiert sein, um sie von Drohnenvibration und -bewegung zu isolieren. Die RTK-GPS-Integration ist für die genaue Geotagging jedes Thermobildes unerlässlich und ermöglicht die präzise Fehlerlokalisierung auf Brückenplänen.
Passive Drone-IRT-Untersuchungen von Brückenfahrbahnen und Fahrbahnbelägen müssen in Zeiten ausreichender Sonneneinstrahlung durchgeführt werden. Das optimale Fenster liegt 5–9 Stunden nach Sonnenaufgang (Aufheizphase, typischerweise 10:00–15:00 Uhr in gemäßigten Klimazonen) oder 3–5 Stunden nach Sonnenuntergang (Abkühlphase, typischerweise 20:00–0:00 Uhr). Die Solarstrahlung sollte 250 W-h/m² für einen zuverlässigen thermischen Kontrast überschreiten. Bewölkung, selbst lockere Bewölkung, reduziert den thermischen Kontrast drastisch, da sie die direkte Sonnenstrahlung durch diffuse Himmelsstrahlung ersetzt. Windgeschwindigkeiten über 24 km/h (15 mph) verschlechtern den thermischen Kontrast durch verstärkte konvektive Kühlung. Die Oberfläche muss trocken sein – stehendes Wasser oder Feuchtigkeit erzeugt durch Verdunstungskühlung falsche Kaltstellen. Untersuchungen sind bei Regen, Nebel oder bedecktem Himmel sowie in den Wintermonaten (Oktober–Februar auf der Nordhalbkugel) unwirksam, wenn die Sonneneinstrahlung unzureichend ist. Einige Straßenbauverwaltungen (DOTs) empfehlen Untersuchungen zwischen 11:00 und 14:00 Uhr Ortszeit an klaren, sonnigen Tagen vom späten Frühjahr bis zum frühen Herbst für optimale Ergebnisse.
Die Flughöhe bestimmt direkt den Bodenabtastabstand (GSD) für Wärmebilder – die physikalische Größe, die jedes Pixel auf der untersuchten Oberfläche darstellt. GSD = (Pixelpitch × Höhe) / Brennweite. Für eine DJI Zenmuse H20T-Kamera (12 µm Pixelpitch, 13,5 mm Brennweite) in 30 m Höhe: GSD = (0,012 × 30) / 13,5 = 0,027 m = 2,7 cm/Pixel. In 75 m Höhe: GSD = 6,7 cm/Pixel. Eine höhere Flughöhe deckt mehr Fläche pro Bild ab, reduziert jedoch die räumliche Auflösung, wodurch kleine Fehler möglicherweise unentdeckt bleiben. Für die Delaminationserkennung auf Brückenfahrbahnen wird ein GSD von 3–5 cm/Pixel empfohlen, was je nach Kameraspezifikation Flughöhen von 30–60 m entspricht. Niedrigere Höhen (15–25 m) werden verwendet, wenn nach kleinen Fehlern gesucht wird oder ein höherer thermischer Kontrast erforderlich ist. Die Geschwindigkeit der Drohne muss mit der Höhe und der Bildrate der Kamera abgestimmt sein, um Bewegungsunschärfe zu vermeiden – typische Untersuchungsgeschwindigkeiten betragen 3–8 m/s (10–28 km/h).
Drone IRT erkennt oberflächennahe Fehler, die thermische Barrieren bilden oder den Wärmefluss verändern. In Betonbrückenfahrbahnen: Delaminationen (horizontale Trennungen innerhalb des Betons, typischerweise auf Höhe der Bewehrungsebene), Überzugsablösungen (Verlust der Haftung zwischen Asphalt-/Betonüberzug und tragender Fahrbahnplatte) und oberflächennahe Hohlräume. In Asphaltfahrbahnen: Zwischenschichtablösungen (Trennung zwischen Fahrbahnlagen), oberflächennahe Hohlräume durch Verdichtungsprobleme oder Durchlassschäden sowie Feuchtigkeitsansammlungen. Die thermische Signatur: Heiße Stellen während der Sonneneinstrahlung (positiver Kontrast), da Luftspalte die Oberfläche vor dem Wärmefluss in tiefere Materialschichten isolieren, oder warme Bereiche während der nächtlichen Abkühlung (inverser Kontrast), da Fehler die Wärme länger speichern. Typische nachweisbare ΔT liegen zwischen 0,5 °C für tiefe Fehler (>75 mm) und 3 °C oder mehr für flache Fehler. Die minimale nachweisbare Delaminationsfläche beträgt unter guten thermischen Bedingungen etwa 150×150 mm. Die Tiefenbegrenzung liegt typischerweise bei 100–150 mm von der Oberfläche – tiefere Fehler erzeugen einen thermischen Kontrast unterhalb der NETD-Schwelle der Kamera.
Drone IRT und fahrzeugmontierte IRT sind komplementäre Methoden mit unterschiedlichen Stärken. Fahrzeugmontierte IRT (gemäß ASTM D4788) erfasst thermische Daten mit Geschwindigkeiten bis zu 113 km/h (70 mph) bei einer Streifenbreite von 4,6 m (15 Fuß) und deckt eine typische Brückenfahrbahn in 30 Minuten ohne Verkehrssperrung ab. Drone IRT ist langsamer – die typische Abdeckungsrate beträgt ~475 m²/h (etwa 4.740 m² pro Tag) bei Untersuchungsgeschwindigkeiten von 3–8 m/s – bietet jedoch Zugang zu Brückenelementen, die mit Fahrzeugen nicht erreichbar sind: Fahrbahnuntersichten, vertikale Pfeilerflächen, Widerlager, Trägerenden, Lager und Durchlassinnenseiten. Drone IRT ermöglicht auch Inspektionen aus mehreren Winkeln (von oben, schräg, vertikal) und kann Brücken über Wasser, tiefen Tälern oder ökologisch sensiblen Gebieten zugänglich machen, wo Fahrzeugzugang unmöglich ist. Die Kosten pro Quadratmeter für Drone IRT betragen etwa 0,65–1,30 $/m² gegenüber 1,60–3,25 $/m² für Fahrzeug-IRT inklusive Mobilisierung, wobei Drohnenuntersuchungen mehr Flüge für eine äquivalente Fahrbahnabdeckung erfordern. Der optimale Ansatz nutzt Fahrzeug-IRT für schnelles Fahrbahn-Screening und Drone IRT für gezielte Inspektion unzugänglicher Elemente.
Mehrere Deep-Learning-Architekturen wurden auf Drone-IRT-Daten zur automatisierten Fehlererkennung angewendet. Faltungsneuronale Netze vom Typ U-Net erreichen eine pixelgenaue semantische Segmentierung thermischer Anomalien und erzeugen genaue Fehlergrenzkarten mit einer in der Forschung berichteten Klassifikationsgenauigkeit von ~84 %. Transformer-basierte Objekterkennungsmodelle wie Grounding DINO haben auf Brückenfahrbahn-Thermodaten eine mittlere durchschnittliche Präzision (mAP@[0.5:0.95]) von 70 % bei einem durchschnittlichen Intersection over Union (IoU) von 0,89 erreicht. YOLO-Varianten (You Only Look Once) ermöglichen eine Echtzeiterkennung während des Fluges für sofortiges Operator-Feedback. CNN-basierte Klassifikatoren unterscheiden Delamination von Falschpositiven (Oberflächenmerkmale, Feuchtigkeit, Ablagerungen) durch Erlernen charakteristischer thermischer Signaturen – Größe, Form, Kantenschärfe, ΔT-Größe und räumlicher Kontext. Merkmalsextraktionsmethoden analysieren thermische Texturparameter einschließlich mittlerer Temperatur, Standardabweichung, Schiefe, Kurtosis und Entropie innerhalb gleitender Fenster. Die University of Central Florida demonstrierte ein KI-IRT-Framework unter Verwendung eines Transformer-Modells, das mit über 23.000 Drohnen-/Fahrzeug-IR-Bildern von drei Brücken in Florida bei Tag- und Nachtbedingungen trainiert wurde.
Drone-IRT-Einsätze müssen den Vorschriften der nationalen Luftfahrtbehörden entsprechen. In den USA regelt FAA Part 107 den gewerblichen Drohnenbetrieb mit Anforderungen an die Remote-Pilot-Zertifizierung, Luftfahrzeugregistrierung (250 g+), Sichtverbindung (VLOS), maximale Höhe von 120 m (400 ft) über Grund und kein Überflug über Personen ohne Ausnahmegenehmigung. Nächtliche IRT-Untersuchungen erfordern eine Part-107-Nachtausnahmegenehmigung oder die Einhaltung der Nachtbetriebsregel von 2021 (Kollisionswarnleuchten, aktualisiertes Remote-Pilot-Zertifikat). Operationen außerhalb der Sichtverbindung (BVLOS) – erforderlich für lange Fahrbahnabschnitte oder große Brückenfahrbahnen – erfordern eine Part-107-BVLOS-Ausnahmegenehmigung mit genehmigtem Sicherheitsnachweis. In Europa stuft die EASA-Verordnung 2019/947 die Infrastrukturinspektion als Specific-Kategorie ein, die eine Betriebsgenehmigung, eine Risikobewertung nach der SORA-Methodik und eine UAS-Betreiberbescheinigung erfordert. Das ICAO Circular 328 (2011) und die ICAO Model UAS Regulations (2020) bieten einen von vielen Ländern übernommenen Regulierungsrahmen. Drohnenbetreiber müssen auch lokale Luftraumbeschränkungen (Flughafennähe, Genehmigungen für kontrollierten Luftraum via LAANC in den USA), Datenschutzgesetze und Datenschutzbestimmungen einhalten.
Die Drone-IRT-Datenverarbeitung beginnt mit der radiometrischen Kalibrierung roher Wärmebildsequenzen, bei der Detektorzählwerte unter Verwendung von Werkskalibrierdaten und atmosphärischen Transmissionskorrekturen in physikalische Temperaturwerte umgewandelt werden. Einzelne georeferenzierte Wärmebilder werden mit Structure-from-Motion (SfM)-Photogrammetrie zu Orthomosaiken zusammengesetzt – dabei sind 70–80 % Vorwärtsüberlappung und 60–70 % Seitenüberlappung zwischen den Bildern erforderlich. Das Thermomosaik wird mithilfe von RTK-GPS-Koordinaten und Bodenkontrollpunkten mit einer absoluten Genauigkeit von 2–5 cm an Brückenpläne oder GIS-Daten angeglichen. Eine Temperaturnormalisierung korrigiert räumliche Variationen der Sonneneinstrahlung, des Kameraverhaltens und der Umgebungstemperatur über das Mosaik hinweg. KI-Erkennungsmodelle durchsuchen das normalisierte Mosaik nach thermischen Anomalien, die als georeferenzierte Shapefiles oder GeoJSON-Polygon-Layer exportiert werden. Jede Anomalie wird basierend auf der ΔT-Größe nach Schweregrad klassifiziert: ΔT < 1 °C (überwachen, niedrige Priorität), ΔT 1–3 °C (Reparatur planen, mittlere Priorität), ΔT 3–10 °C (bald reparieren, hohe Priorität), ΔT > 10 °C (sofortige Reparatur, kritische Priorität). Die Ergebnisse werden in Inspektionsberichten mit über Brückenschemata gelegten Wärmekarten, Anomalietabellen mit Koordinaten und Abmessungen, Schweregradbewertungen und empfohlenen Folgemaßnahmen zusammengestellt. Die Integration mit TarmacView-Bildinspektionsdaten liefert eine umfassende Fehlerdatenbank für Brückenmanagementsysteme.
Drone IRT hat mehrere wichtige Einschränkungen. (1) Umweltabhängigkeit: erfordert klaren Himmel, ≥250 W-h/m² Solarstrahlung, schwachen Wind (<24 km/h), trockene Oberfläche – Untersuchungsfenster sind in gemäßigten Klimazonen auf ~30 % der Tageslichtstunden beschränkt. (2) Tiefenbegrenzung: erkennt zuverlässig nur Fehler innerhalb von 100–150 mm der Oberfläche; tiefere Fehler erzeugen thermischen Kontrast unterhalb der Erkennungsschwelle. (3) Überzugsdämpfung: Asphalt- oder Betonüberzüge reduzieren den thermischen Kontrast bei 50 mm Dicke um 50 % oder mehr; Überzüge über 100 mm können die Erkennung ausschließen. (4) Keine inhärente Tiefenmessung: konventionelle Drone IRT kann die Fehlertiefe ohne Zeitraffermethoden oder ergänzende ZfP nicht bestimmen. (5) Flugausdauer: typische batteriebegrenzte Flüge von 20–30 Minuten beschränken die Abdeckung pro Flug auf ~2–4 Hektar (5–10 Acres). (6) Falschpositive: Oberflächenmerkmale – Ölflecken, Gummiablagerungen, Feuchtigkeit, Schatten, Oberflächentexturvariationen, Ablagerungen – erzeugen thermische Anomalien, die mit Fehlern verwechselt werden können. (7) Regulatorische Einschränkungen: VLOS-Anforderung begrenzt die kontinuierliche Inspektionsreichweite; BVLOS-Ausnahmegenehmigungen erfordern umfangreiche Sicherheitsdokumentation. (8) Variabilität des Oberflächenemissionsgrades: Der Emissionsgrad von Beton und Asphalt variiert mit der Gesteinskörnung, Oberflächentextur, Feuchtigkeitsgehalt und Bewitterung und beeinflusst die Genauigkeit der Temperaturmessung.
Drone IRT für Brückeninspektionen einsetzen
Kombinieren Sie UAV-gestützte Wärmebildtechnik mit KI-gesteuerter Analyse für eine schnelle, berührungslose Delaminationserkennung auf Brückenfahrbahnen und Fahrbahnbelägen. Erhalten Sie automatisierte Berichte über thermische Anomalien mit GIS-Integration – ohne Spur sperren.
Die automatisierte Drohneninspektion nutzt vorprogrammierte Flugrouten, Computer Vision und KI-Analyse, um Infrastrukturanlagen wie Start- und Landebahnen, Brüc...
Drohnen-Flugplanung für die Infrastrukturinspektion
Die Drohnen-Flugplanung für die Infrastrukturinspektion umfasst die Gestaltung automatisierter Flugpfade (Waypoint-Missionen) mit geeigneter Höhe, Geschwindigke...
23 Min. Lesezeit
Drone
UAV
+8
Cookie-Zustimmung Wir verwenden Cookies, um Ihr Surferlebnis zu verbessern und unseren Datenverkehr zu analysieren. See our privacy policy.