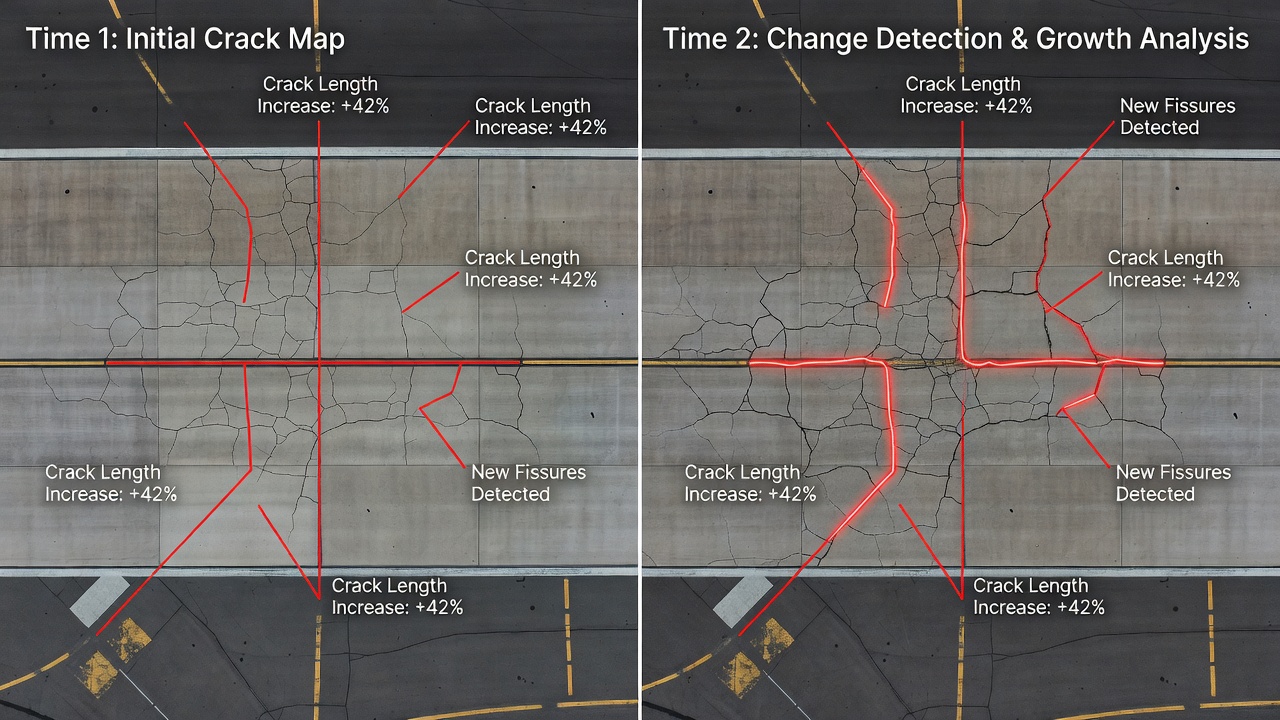
La detección de cambios compara imágenes o nubes de puntos co-registradas de la misma estructura tomadas en diferentes momentos para identificar defectos nuevos, que empeoran o reparados — grietas que crecieron, desconchamientos que se agrandaron, corrosión que se extendió. Permite el seguimiento cuantitativo del deterioro a lo largo del tiempo para la monitorización de infraestructuras.
Detección de Cambios para la Monitorización de Infraestructuras
Definición y Propósito
La detección de cambios es el proceso de identificar diferencias en el estado de una estructura, superficie o entorno mediante la comparación de observaciones adquiridas en diferentes momentos. En el contexto de la monitorización de infraestructuras civiles, la detección de cambios compara sistemáticamente imágenes, ortomosaicos o nubes de puntos 3D co-registrados del mismo activo — una pista, tablero de puente, carretera o edificio — capturados durante levantamientos repetidos, para identificar nuevos defectos, cuantificar la progresión del deterioro existente y verificar la efectividad de las intervenciones de mantenimiento. A diferencia de una inspección puntual que captura solo una instantánea de la condición actual, la detección de cambios revela la dimensión temporal del deterioro: qué grietas están creciendo activamente, qué áreas de desconchamiento se están agrandando, dónde se está extendiendo la corrosión y qué deformaciones se están acumulando.
El propósito fundamental de la detección de cambios es transformar los datos de condición de infraestructura de instantáneas estáticas en registros temporales dinámicos. Una inspección única responde la pregunta “¿cuál es la condición actual?” La detección de cambios responde la pregunta operativamente más relevante “¿cómo está cambiando la condición?” Esta distinción es crítica para la gestión de activos de infraestructura porque el deterioro es un proceso dinámico. Una grieta que se ha mantenido estable con un ancho de 0.3 mm durante tres años presenta una prioridad de mantenimiento diferente a una grieta que creció de 0.3 mm a 1.5 mm en el mismo período, aunque ambas grietas parezcan idénticas en una inspección única. La detección de cambios cuantifica esta tasa de deterioro, permitiendo la planificación de mantenimiento basada en condición, la previsión presupuestaria y la evaluación de riesgos que son imposibles a partir de inspecciones estáticas.
En la gestión de pavimentos de aeropuertos bajo el Anexo 14 de la OACI — Aeródromos, Volumen I, el operador del aeródromo debe mantener los pavimentos en una condición que evite daños a las aeronaves y esté libre de material suelto. Si bien las inspecciones visuales periódicas satisfacen el cumplimiento básico, el Doc 9157 de la OACI (Manual de Diseño de Aeródromos, Parte 3: Pavimentos) y la norma ASTM D5340 para el Índice de Condición de Pavimentos de Aeropuertos (PCI) enfatizan la importancia de rastrear las tendencias de deterioro a lo largo del tiempo. La detección de cambios proporciona la base cuantitativa para el análisis de tendencias, permitiendo a los operadores de aeropuertos identificar pavimentos con tasas de deterioro aceleradas antes de que alcancen estados de condición críticos. La metodología apoya directamente los objetivos del Plan Global de Navegación Aérea (GANP) de la OACI para la resiliencia de infraestructuras y la optimización del mantenimiento basada en riesgos.
El concepto de detección de cambios se origina en la teledetección y el análisis geoespacial, donde se desarrolló para la monitorización de cambios en el uso del suelo, el seguimiento de la deforestación y el análisis del desarrollo urbano utilizando imágenes satelitales. Estos métodos fundamentales — diferenciación de imágenes, análisis de componentes principales y comparación post-clasificación — han sido adaptados y extendidos para aplicaciones de infraestructura donde la escala del cambio es mucho menor (milímetros a centímetros en lugar de metros a kilómetros) y los requisitos de precisión son correspondientemente mayores. La detección de cambios moderna en infraestructura opera con sensibilidad sub-milimétrica para la medición de grietas y sensibilidad sub-centimétrica para la monitorización de deformaciones.
Registro de Imágenes — El Requisito Previo para la Detección de Cambios
Por Qué la Precisión del Registro Determina la Calidad de la Detección de Cambios
La detección confiable de cambios depende fundamentalmente de la precisión del registro de imágenes — el proceso de alinear geométricamente dos o más imágenes de la misma escena para que los píxeles correspondientes representen la misma ubicación física en la estructura. Sin un registro preciso, cualquier comparación entre imágenes contendrá señales de cambio espurias en los bordes de objetos, límites de textura y características superficiales que simplemente están desalineadas en lugar de haber cambiado físicamente. Los errores de registro de incluso un píxel pueden producir artefactos de cambio falsos que abruman las señales reales de defectos, particularmente para defectos pequeños como grietas que pueden tener solo 2-5 píxeles de ancho en imágenes de infraestructura típicas.
La relación entre la precisión del registro y el cambio mínimo detectable está gobernada por la relación señal-ruido del sistema de detección. Para los métodos de detección de cambios basados en píxeles, los errores de registro aparecen como ruido aditivo en la imagen de diferencia. La investigación demuestra consistentemente que se requiere una precisión de registro sub-píxel — típicamente mejor que 0.5 píxeles de error cuadrático medio (RMSE) — para la detección confiable de cambios pequeños en defectos. Con una distancia de muestreo en el terreno (GSD) de 1 mm por píxel (típica para levantamientos de precisión de pistas), esto corresponde a una tolerancia de alineación geométrica de 0.5 mm. Lograr esta tolerancia en levantamientos repetidos realizados con meses o años de diferencia requiere metodologías de levantamiento consistentes, redes de control terrestre estables y algoritmos de registro robustos.
Registro de Imágenes Basado en Características
El registro basado en características identifica características distintivas y repetibles tanto en la imagen de referencia como en la imagen objetivo, establece correspondencias entre estas características y calcula la transformación geométrica que mapea la imagen objetivo al sistema de coordenadas de la imagen de referencia. Este enfoque es el método más utilizado para la detección de cambios en infraestructura porque es robusto a variaciones de iluminación, diferencias moderadas en el ángulo de observación y cambios estacionales en la apariencia superficial que no representan deterioro estructural.
El flujo de trabajo de registro comienza con la detección de características utilizando algoritmos diseñados para la repetibilidad en diferentes condiciones de imagen. La Transformada de Características Visuales Invariante a Escala (SIFT) sigue siendo el detector más utilizado para el registro de infraestructura, identificando puntos clave en ubicaciones de alto gradiente espacial que son robustos a cambios de escala y rotación. Las Características Robustecedoras Aceleradas (SURF) proporcionan un cálculo más rápido con un rendimiento comparable para muchas aplicaciones. Para superficies de pavimento donde la textura es relativamente uniforme, las características FAST orientadas y BRIEF rotado (ORB) y las características AKAZE ofrecen alternativas con diferentes compensaciones entre eficiencia computacional y robustez de emparejamiento. Un ortomosaico típico de 20 megapíxeles de una sección de pista de 500 metros produce 10,000-50,000 características detectables dependiendo de la textura del pavimento, el espaciado de juntas y las marcas superficiales.
El emparejamiento de características establece correspondencias entre las características detectadas en las imágenes de referencia y objetivo utilizando la similitud de vectores descriptores, típicamente medida como distancia euclidiana o de Hamming entre vectores descriptores. El conjunto inicial de coincidencias contiene inevitablemente valores atípicos — correspondencias incorrectas que surgen de patrones repetitivos, parches de textura similares o ambigüedad de características. El rechazo de valores atípicos utiliza RANSAC (Consenso de Muestra Aleatoria) o sus variantes (MLESAC, MSAC) para estimar iterativamente el modelo de transformación mientras clasifica las coincidencias como internas o atípicas según su consistencia con el modelo estimado. Un umbral RANSAC de 2-3 píxeles a la resolución del ortomosaico es típico para la detección de cambios en infraestructura, rechazando coincidencias cuyo error residual supera este valor.
El modelo de transformación geométrica se selecciona según la deformación esperada entre levantamientos. Para levantamientos repetidos con drones realizados con parámetros de vuelo consistentes y posicionamiento RTK, una transformación de similitud (traslación, rotación, escala uniforme) o una transformación afín (seis parámetros: dos traslaciones, dos escalas, dos cortes) es típicamente suficiente. Para levantamientos con diferencias de perspectiva significativas o variación del terreno, puede requerirse una transformación proyectiva (ocho parámetros, también llamada homografía) o una transformación polinómica (de orden superior, típicamente 2º o 3º orden para levantamientos de grandes áreas). La transformación se calcula a partir de las correspondencias internas utilizando estimación por mínimos cuadrados, con el RMSE residual como métrica de calidad principal. Un RMSE de registro inferior a 0.5 píxeles es el objetivo para una detección de cambios de alta calidad; un RMSE superior a 1 píxel indica la necesidad de mejorar los puntos de control o la selección del modelo de transformación.
Registro de Imágenes Basado en Intensidad
El registro basado en intensidad trabaja directamente con valores de intensidad de píxeles en lugar de características discretas, optimizando los parámetros de transformación para maximizar una métrica de similitud calculada sobre la región de imagen superpuesta. Este enfoque es ventajoso cuando el contenido de la imagen carece de características distintivas suficientes para un emparejamiento de características confiable — por ejemplo, superficies de concreto recién colocado, asfalto con textura uniforme o superficies cubiertas de agua o escombros. Los métodos basados en intensidad también se utilizan para el ajuste fino después de un registro inicial basado en características, logrando la precisión sub-píxel requerida para la detección de cambios de alta sensibilidad.
El proceso de optimización transforma iterativamente la imagen objetivo, calcula la métrica de similitud contra la imagen de referencia y ajusta los parámetros de transformación para mejorar la métrica. Las métricas de similitud comunes incluyen:
Correlación Cruzada Normalizada (NCC) calcula el coeficiente de correlación entre las intensidades de píxeles correspondientes después de normalizar cada ventana de imagen a media cero y desviación estándar unitaria. Los valores de NCC van de -1 a +1, con valores cercanos a 1 que indican una fuerte alineación. NCC es robusto a diferencias de intensidad lineales entre imágenes, lo que lo hace adecuado para levantamientos con diferentes configuraciones de exposición o cambios menores de iluminación.
Información Mutua (MI) mide la dependencia estadística entre las distribuciones de intensidad de las dos imágenes, basada en la entropía de la información. MI es particularmente robusto a diferencias de intensidad no lineales entre imágenes, como las causadas por diferentes tipos de sensor, cambios estacionales de vegetación o condiciones de superficie seca versus húmeda. La MI entre dos imágenes perfectamente alineadas de la misma escena se maximiza cuando la distribución de intensidad conjunta tiene una entropía mínima — es decir, la relación entre intensidades es tan predecible como sea posible.
Suma de Diferencias al Cuadrado (SSD) y Suma de Diferencias Absolutas (SAD) son las métricas más simples, calculando directamente la diferencia de intensidad píxel a píxel. Asumen que los píxeles correspondientes en las dos imágenes deberían tener intensidades idénticas después de la alineación geométrica, una suposición que rara vez es válida en la práctica debido a variaciones de iluminación, exposición y respuesta del sensor. SSD y SAD se usan típicamente solo para el emparejamiento estéreo multivista dentro de una sola época de levantamiento, no para la detección de cambios entre períodos.
Los algoritmos de optimización para el registro basado en intensidad incluyen el descenso de gradiente, el método de Powell y el algoritmo de Levenberg-Marquardt. Las estrategias multirresolución (de grueso a fino) son estándar, comenzando con imágenes submuestreadas para estimar la alineación aproximada y refinando progresivamente a resoluciones más altas. Para la detección de cambios en infraestructura, el registro basado en intensidad logra típicamente una precisión de 0.1-0.3 píxeles después del ajuste fino, en comparación con 0.3-0.8 píxeles para los métodos basados únicamente en características.
Registro Georreferenciado Usando PCG y GNSS
El registro georreferenciado utiliza puntos de control terrestre (PCG) levantados y posiciones de cámara precisas de GNSS RTK (Cinemática en Tiempo Real) o PPK (Cinemática Post-Procesada) para establecer directamente la relación geométrica entre las imágenes y las coordenadas del mundo real. Cada imagen se geoetiqueta con la posición de la cámara (X, Y, Z) y la orientación (omega, phi, kappa) del GNSS/IMU a bordo, y esta información se refina durante el procesamiento fotogramétrico utilizando PCG levantados con precisión centimétrica.
Para la detección de cambios, la ventaja clave del registro georreferenciado es que los levantamientos repetidos están inherentemente alineados al mismo sistema de coordenadas, lo que reduce significativamente el problema de registro. En lugar de calcular transformaciones por pares entre épocas de levantamiento, cada levantamiento se procesa de forma independiente para producir ortomosaicos y nubes de puntos en un sistema de referencia de coordenadas común (típicamente WGS84 con proyección Mercator transversal local). El desalineamiento restante entre levantamientos se corrige entonces utilizando una transformación residual estimada a partir de características estables visibles en ambos conjuntos de datos — marcas de pavimento, luces de pista, sellos de juntas o dianas de levantamiento dedicadas.
La norma ISO 19157 para la calidad de la información geográfica especifica requisitos de precisión posicional para datos geoespaciales, que se aplican directamente a la detección de cambios georreferenciada. Para la monitorización de infraestructuras, los objetivos de precisión típicos son RMSE horizontal mejor que 3 cm y RMSE vertical mejor que 5 cm para levantamientos de pavimentos. Cuando estas precisiones se logran mediante fotogrametría basada en PCG o posicionamiento RTK de drones, el error de registro residual entre levantamientos repetidos es típicamente de 1-3 píxeles a 1 mm de GSD, que luego se reduce aún más mediante un registro fino hasta el nivel sub-píxel.
El Anexo 15 de la OACI — Servicios de Información Aeronáutica establece requisitos de calidad para los datos aeronáuticos que influyen en el diseño de levantamientos de detección de cambios. Los datos de levantamiento utilizados para la gestión de pavimentos de aeropuertos deben cumplir con niveles definidos de precisión, resolución e integridad acordes con la criticidad de los datos. Para aplicaciones de detección de cambios donde los datos de levantamiento informan decisiones de mantenimiento que afectan la seguridad de las pistas, los requisitos de calidad de datos son correspondientemente estrictos, requiriendo verificación documentada de precisión utilizando puntos de control independientes e informes exhaustivos de metadatos.
Métodos de Detección de Cambios
Diferenciación de Imágenes
La diferenciación de imágenes es el método de detección de cambios más directo y computacionalmente eficiente. Después del registro, se calcula la diferencia píxel a píxel entre la imagen de referencia y la imagen objetivo: Diferencia(x, y) = I_objetivo(x, y) - I_referencia(x, y). Para imágenes en escala de grises con valores de intensidad de 8 bits (0-255), la imagen de diferencia varía de -255 a +255, típicamente reescalada a 0-255 para visualización. Las áreas sin cambio producen valores de diferencia cercanos a cero (sujetos a ruido del sensor y variación menor de iluminación), mientras que las áreas con cambio físico producen desviaciones positivas o negativas significativas.
El parámetro crítico en la diferenciación de imágenes es el umbral de cambio — la magnitud de diferencia por encima de la cual un píxel se clasifica como cambiado. Seleccionar un umbral apropiado requiere equilibrar la tasa de detección (identificar correctamente cambios verdaderos) contra la tasa de falsas alarmas (clasificar incorrectamente píxeles no cambiados como cambiados). El umbral óptimo depende de la relación señal-ruido del sistema de imagen, la precisión del registro y la magnitud de los cambios que se buscan. Los enfoques comunes para la selección del umbral incluyen:
Umbral por desviación estándar establece el umbral en k × σ, donde σ es la desviación estándar de la imagen de diferencia en áreas que se sabe que no han cambiado, y k es un multiplicador típicamente entre 2 y 5. Un umbral de 3σ corresponde aproximadamente al 99.7% de confianza de que una diferencia de píxel que excede este valor representa un cambio real, asumiendo ruido distribuido normalmente.
Método de Otsu calcula el umbral que minimiza la varianza intra-clase entre píxeles de cambio y no cambio, adaptándose automáticamente a las propiedades estadísticas de cada imagen de diferencia. Esto es efectivo cuando el área de cambio es una fracción moderada de la imagen total (5-30%).
Umbral bayesiano modela la imagen de diferencia como una mezcla de dos distribuciones — píxeles sin cambio siguiendo una distribución gaussiana estrecha centrada en cero, y píxeles con cambio siguiendo una distribución más amplia con media posiblemente diferente de cero. El algoritmo de Maximización de Expectativas (EM) estima los parámetros de ambas distribuciones, y el umbral óptimo se calcula a partir de la intersección de las dos distribuciones.
La diferenciación de imágenes es más efectiva para detectar cambios en la apariencia superficial: nuevas grietas (características lineales oscuras sobre pavimento claro), manchas por fugas o derrames químicos, crecimiento de vegetación y decoloración superficial por inicio de corrosión. Es menos efectiva para cuantificar cambios geométricos que no producen fuertes diferencias de intensidad — por ejemplo, el ensanchamiento de grietas donde la grieta ya era visible en la imagen de referencia y el aumento de ancho produce solo cambios sutiles en los bordes.
Análisis de Componentes Principales (PCA)
El Análisis de Componentes Principales (PCA) aplicado a la detección de cambios transforma datos de imágenes multi-temporales en un nuevo sistema de coordenadas donde la información de cambio se concentra en componentes específicos. Para un par de imágenes (referencia y objetivo), el PCA se calcula sobre la matriz de datos combinada, produciendo dos componentes principales. El primer componente principal captura la información común — los píxeles que son similares entre las dos imágenes. El segundo componente principal captura la diferencia residual — la información de cambio.
La ventaja del PCA sobre la diferenciación simple es que decorrelaciona automáticamente los datos, separando las señales de cambio de las diferencias sistemáticas en brillo general, contraste y respuesta del sensor. Esto hace que el PCA sea más robusto a las variaciones de iluminación entre levantamientos. La imagen de cambio de PCA (típicamente el segundo componente principal) a menudo revela cambios sutiles que estarían ocultos en el ruido usando diferenciación directa.
Para el análisis multi-temporal con tres o más épocas de levantamiento, la Detección de Alteración Multivariada (MAD) extiende el concepto de PCA. MAD encuentra transformaciones lineales de los datos multi-temporales que maximizan la correlación entre las bandas transformadas, luego identifica cambios como desviaciones de esta estructura de correlación. Los componentes MAD se ordenan por contenido de información de cambio decreciente, permitiendo al analista centrarse en las señales de cambio más significativas. El MAD Reweighted Iterativamente (IR-MAD) mejora la robustez al reducir iterativamente el peso de los píxeles identificados como cambiados en iteraciones anteriores, refinando el modelo de fondo sin cambio.
Detección de Cambios Basada en Aprendizaje Automático
Los métodos de aprendizaje automático para la detección de cambios han avanzado significativamente con la disponibilidad de grandes conjuntos de datos de entrenamiento y arquitecturas de aprendizaje profundo. Estos métodos aprenden el mapeo de pares de imágenes a mapas de cambio directamente a partir de ejemplos etiquetados, en lugar de depender de umbrales o modelos estadísticos diseñados manualmente. Tres categorías principales de detección de cambios basada en ML son relevantes para la monitorización de infraestructuras:
La clasificación basada en píxeles trata cada píxel de forma independiente, clasificándolo como cambio o no cambio basándose en características extraídas de los píxeles correspondientes en ambas imágenes más el contexto de vecindad. Las características pueden incluir diferencias espectrales, medidas de textura (GLCM, filtros Gabor), estadísticas espaciales locales y representaciones multiescala. Los clasificadores de Bosque Aleatorio, Máquinas de Vectores de Soporte (SVM) y Gradient Boosting son opciones comunes. El entrenamiento requiere mapas de cambio etiquetados para un conjunto representativo de superficies de infraestructura y tipos de defectos.
El aprendizaje profundo basado en parches utiliza redes neuronales convolucionales (CNN) que operan sobre parches de imagen centrados en cada píxel. Una arquitectura de red siamesa procesa el parche de referencia y el parche objetivo a través de dos ramas CNN idénticas con pesos compartidos, luego un módulo de comparación (concatenación, diferenciación o correlación) fusiona las representaciones de características, y una cabeza de clasificación produce la probabilidad de cambio para el píxel central. Las arquitecturas basadas en UNet con conexiones de salto son particularmente efectivas para la detección de cambios porque preservan la resolución espacial mientras integran contexto multiescala. Los conjuntos de datos de entrenamiento para la detección de cambios en infraestructura deben incluir ejemplos representativos de cada tipo de defecto (grietas, desconchamientos, corrosión, manchas) bajo diferentes condiciones de iluminación y superficie.
La detección de cambios basada en objetos (OBIA) primero segmenta la imagen en objetos significativos — paneles de pavimento individuales, segmentos de grietas, regiones de desconchamiento — luego compara los objetos a lo largo del tiempo en lugar de los píxeles. Este enfoque es particularmente adecuado para la monitorización de infraestructuras porque los defectos son naturalmente similares a objetos: un desconchamiento es una región contigua, una grieta es una característica lineal, los parches de corrosión son espacialmente coherentes. La detección de cambios basada en objetos calcula cambios en las propiedades del objeto (área, perímetro, forma, intensidad media) y clasifica los objetos como estables, en crecimiento, en disminución o nuevos. El enfoque basado en objetos reduce inherentemente el ruido de los artefactos de píxeles aislados y proporciona información de cambio en términos directamente relevantes para la evaluación de la condición de la infraestructura — área de nuevo desconchamiento, longitud de extensión de grieta, aumento porcentual en la cobertura de corrosión.
Método
Precisión Típica
Fortalezas
Limitaciones
Diferenciación de Imágenes
60-75% precisión de píxel
Simple, rápida, interpretable
Sensible a iluminación, necesita umbral óptimo
PCA / MAD
70-85% precisión de píxel
Robusta a variaciones de brillo
Requiere datos multiespectrales o multi-temporales
Bosque Aleatorio / SVM
75-88% precisión de píxel
Maneja relaciones no lineales
Necesita datos de entrenamiento etiquetados, generalización limitada
CNN (UNet siamés)
85-95% precisión de píxel
Alta precisión, aprende contexto espacial
Grandes datos de entrenamiento requeridos, computacionalmente intensivo
OBIA
80-92% precisión de objeto
Métricas de cambio coinciden con semántica de defectos
Dependiente de calidad de segmentación, flujo de trabajo complejo
Detección de Cambios en Grietas
Cuantificación del Crecimiento de Grietas
La detección de cambios en grietas es la aplicación más común y operativamente importante del análisis temporal para la monitorización de infraestructuras. El crecimiento de grietas — el aumento en ancho, longitud o densidad de una grieta a lo largo del tiempo — es el indicador principal de deterioro activo en estructuras de concreto y asfalto. La detección de cambios para grietas debe operar con sensibilidad sub-milimétrica porque las diferencias que se miden son a menudo más pequeñas que la propia grieta: una grieta que tenía 0.5 mm de ancho en el levantamiento de referencia y tiene 1.2 mm de ancho en el levantamiento de seguimiento representa un cambio de 0.7 mm que debe detectarse de manera confiable contra el ruido de la imagen y la incertidumbre del registro.
La detección de cambios en grietas a nivel de píxel utiliza mapeo diferencial de grietas, donde los mapas de probabilidad de grietas de cada época de levantamiento se comparan. El mapa de probabilidad de grietas — generado por un modelo de aprendizaje profundo de segmentación de grietas o por un algoritmo convencional de detección de grietas — asigna a cada píxel un valor entre 0 (sin grieta) y 1 (grieta definitiva). El mapa de cambio es la diferencia píxel a píxel en la probabilidad de grieta entre épocas, con valores positivos que indican grietas nuevas o ensanchadas y valores negativos que indican grietas curadas o selladas. El filtrado morfológico elimina píxeles cambiados aislados, y el análisis de componentes conectados agrupa los píxeles cambiados en objetos de cambio discretos.
La medición cuantitativa del cambio de ancho de grieta requiere localización de bordes sub-píxel. Para cada segmento de grieta en la red de grietas, los bordes de la grieta se extraen a resolución sub-píxel utilizando métodos como la detección de bordes escalonados (ajustando la respuesta del borde a una función escalón y encontrando el cruce por cero sub-píxel), la detección de bordes basada en momentos (calculando la posición del borde a partir de los momentos de la imagen), o los modelos de contorno activo (snakes) que evolucionan para coincidir con los límites de la grieta. El ancho en cada punto a lo largo de la grieta se calcula como la distancia entre las dos posiciones sub-píxel del borde medidas perpendicularmente a la línea central de la grieta. El cambio de ancho es entonces la diferencia punto por punto entre épocas, y el aumento de ancho medio sobre la longitud del segmento de grieta es la estadística resumida. Para levantamientos de pavimentos de aeropuertos a 1 mm de GSD, el cambio de ancho de grieta de 0.2-0.3 mm es detectable de manera confiable utilizando métodos sub-píxel con precisión de localización de borde de 0.1 píxel.
La extensión de longitud de grieta mide el aumento en la longitud total de la red de grietas. Esto requiere vectorizar el esqueleto de la grieta en cada época como un conjunto de polilíneas, luego emparejar segmentos de grieta entre épocas utilizando criterios de superposición espacial y proximidad. La nueva extensión de grieta aparece como segmentos de grieta en el levantamiento de seguimiento que no se superponen con ningún segmento de grieta en el levantamiento de referencia pero están conectados a grietas existentes. La tasa de crecimiento de grieta — mm por mes o mm por año — se calcula dividiendo el aumento de longitud total por el intervalo de tiempo entre levantamientos. Para carreteras y pavimentos de aeropuertos, las tasas típicas de crecimiento de grietas varían de 0.5-5 mm por mes dependiendo de la carga de tráfico, las condiciones ambientales y la capacidad estructural del pavimento.
Detección de Nuevas Grietas
La detección de nuevas grietas identifica píxeles u objetos de grieta que aparecen en el levantamiento de seguimiento pero estaban ausentes en el levantamiento de referencia. Esto requiere distinguir las nuevas grietas reales de los falsos positivos causados por desalineación de registro, diferencias de iluminación o artefactos de humedad superficial. El proceso de detección generalmente involucra los siguientes pasos:
Generación de máscara de grietas de referencia utilizando un modelo validado de detección de grietas con tasa de falsos positivos conocida. La máscara de referencia debe sobresegmentar de manera conservadora en lugar de subsegmentar — incluir candidatos de grieta inciertos reduce la posibilidad de perder nuevas grietas que eran parcialmente visibles en el levantamiento de referencia.
Generación de máscara de grietas de seguimiento utilizando el mismo modelo de detección de grietas y los mismos parámetros de procesamiento aplicados al ortomosaico de seguimiento co-registrado. La aplicación consistente del algoritmo de detección es esencial; los cambios en el modelo de detección o los parámetros de procesamiento entre épocas introducirían señales de cambio no físicas.
Cálculo de máscara de cambio identificando píxeles que son grieta en la máscara de seguimiento pero no grieta en la máscara de referencia. La apertura morfológica (erosión seguida de dilatación) elimina el ruido de píxeles aislados y artefactos delgados en los bordes de grietas causados por sub-registro de píxeles.
Filtrado geométrico elimina objetos de cambio que no satisfacen los criterios de geometría de grietas — longitud mínima (típicamente >10 píxeles), relación de aspecto mínima (relación largo-ancho >3) y conectividad a redes de grietas existentes. Los grupos de píxeles aislados que no forman características lineales se clasifican como artefactos no relacionados con grietas.
Validación contra inspección manual o verdad de terreno para una muestra de los cambios detectados para calibrar la tasa de falsos positivos y ajustar los parámetros de detección.
El ancho mínimo detectable de una nueva grieta es aproximadamente el GSD de la imagen — típicamente 1-2 mm para levantamientos de pistas. Las grietas más estrechas que el GSD aún pueden ser detectables si producen una diferencia de intensidad (contraste) medible en la imagen, pero la confianza de detección disminuye para grietas de ancho sub-píxel. El flujo de trabajo de detección de cambios de grietas de TarmacView logra una tasa de detección del 90-95% para nuevas grietas de más de 2 mm de ancho a 1 mm de GSD, con una tasa de falsos positivos inferior al 5% para superficies típicas de pavimentos de aeropuertos.
Detección de Cambios en Desconchamientos y Corrosión
Cambio de Área de Desconchamiento
El desconchamiento — la fragmentación y desprendimiento de material superficial de concreto o mampostería — produce depresiones visibles, áridos expuestos y bordes afilados en el límite entre material sano y deteriorado. La detección de cambios para desconchamientos cuantifica el aumento en área, profundidad y perímetro del desconchamiento a lo largo del tiempo. A diferencia de la detección de grietas, que opera sobre características lineales, la detección de desconchamientos requiere la delineación precisa de características de área irregular.
La detección de cambios en desconchamientos utiliza la comparación basada en segmentación entre épocas de levantamiento. El límite del desconchamiento en cada ortomosaico se delinea ya sea manualmente por inspectores, semiautomáticamente utilizando herramientas de segmentación interactiva (algoritmos de grab cut, watershed o contorno activo), o completamente de forma automática utilizando modelos de segmentación de aprendizaje profundo (Mask R-CNN, DeepLab o UNet entrenados en conjuntos de datos de desconchamientos). Una vez que los límites del desconchamiento se extraen como polígonos en cada época, se calculan las métricas de cambio:
Cambio de área = Área_seguimiento - Área_referencia (típicamente reportado en cm² o m²). Tasa de crecimiento de área = Cambio de área / intervalo de tiempo (cm²/mes o m²/año). Cambio de perímetro mide la complejidad del límite del desconchamiento a medida que avanza hacia material previamente sano. Crecimiento radial mide la distancia máxima desde el límite original del desconchamiento hasta el nuevo límite en cualquier dirección, indicando la dirección de deterioro más rápido.
Para estructuras de concreto, las tasas de crecimiento de desconchamiento varían ampliamente dependiendo del mecanismo causante. Los desconchamientos causados por delaminación inducida por corrosión típicamente crecen a tasas de 1-5 cm de extensión radial por año en entornos agresivos. Los desconchamientos causados por acción de congelación-descongelación muestran patrones de crecimiento estacional concentrados en invierno y primavera. Los desconchamientos causados por impacto o sobrecarga son típicamente repentinos en su aparición y pueden permanecer estables si se aborda la causa de la carga.
Mapeo de Propagación de Corrosión
La detección de cambios por corrosión identifica áreas donde los productos de corrosión (óxido en acero, manchas de oxidación en concreto) han aparecido, se han extendido o intensificado entre épocas de levantamiento. La corrosión aparece como una decoloración característica — naranja, marrón o marrón rojizo en superficies de acero; manchas de color óxido en superficies de concreto — que es detectable en imágenes del espectro visible. La firma espectral de la corrosión es distintiva de la mayoría de las otras características superficiales, lo que permite una detección relativamente robusta.
El cálculo del índice de corrosión convierte imágenes RGB en una métrica sensible a la corrosión. Los índices comunes incluyen: la relación Rojo/Verde (las áreas corroídas tienen mayor reflectancia roja en relación al verde); el Índice de Corrosión Normalizado NCI = (Rojo - Verde) / (Rojo + Verde); y el Índice de Óxido RI = (2 × Rojo - Verde - Azul) normalizado por intensidad. Estos índices se umbralizan para producir mapas binarios de corrosión en cada época.
El cambio de cobertura de corrosión es el aumento porcentual en el área afectada por corrosión en relación con el área superficial total. Para puentes y componentes de acero, el umbral de detección de cambios es típicamente del 1-2% del área superficial total para una progresión de corrosión significativa. Para superficies de concreto con manchas, se utilizan umbrales de área más pequeños (0.5-1%) porque las manchas suelen estar más distribuidas espacialmente que la corrosión por picaduras en el acero.
El cambio de severidad de corrosión categoriza la progresión de la corrosión por nivel de severidad siguiendo normas como ISO 4628-3 (Pinturas y barnices — Evaluación de la degradación de recubrimientos — Parte 3: Grado de oxidación) o SSPC-VIS 2 (Norma para evaluar el grado de oxidación en superficies de acero pintadas). La detección de cambios asigna un nivel de severidad a cada parche de corrosión en cada época y señala los parches que han avanzado a un nivel de severidad más alto entre levantamientos. Los niveles de severidad se basan en el porcentaje de área superficial visible afectada por óxido: Ri0 (0%), Ri1 (<0.05%), Ri2 (0.05-0.5%), Ri3 (0.5-1%), Ri4 (1-5%), Ri5 (>5%) según ISO 4628-3.
Detección de Cambios en Nubes de Puntos
Comparación Nube a Nube (C2C)
La distancia Nube a Nube (C2C) es el método más simple para comparar dos nubes de puntos. Para cada punto en la nube de referencia, se encuentra el vecino más cercano en la nube objetivo y se calcula la distancia euclidiana entre ellos. El resultado es un valor de distancia por punto que puede visualizarse como un mapa de distancia codificado por colores, donde el azul indica sin cambio (distancia cercana a cero) y el rojo indica un cambio grande.
Las ventajas de C2C son la eficiencia computacional (O(n log n) con aceleración kd-tree) y la simplicidad conceptual. Sin embargo, C2C tiene limitaciones fundamentales para la detección de cambios en infraestructura. Primero, mide la distancia más corta a cualquier punto en la nube objetivo, no la distancia en la dirección normal a la superficie, lo que puede subestimar significativamente la magnitud de la deformación en superficies inclinadas. Segundo, C2C es sensible a las variaciones de densidad de puntos entre nubes — una nube de mayor densidad mostrará sistemáticamente distancias de vecino más cercano más pequeñas independientemente del cambio físico. Tercero, C2C no proporciona un intervalo de confianza para la medición de distancia, lo que dificulta distinguir la deformación real del ruido de medición.
Por estas razones, C2C se utiliza mejor como un método de cribado rápido para identificar regiones de cambio potencial, seguido de un análisis más riguroso de esas regiones utilizando métodos más sofisticados. En la práctica, C2C con un umbral de 2-3 veces el nivel de ruido de la nube de puntos proporciona un cribado de detección de cambios conservador que captura la mayoría de los cambios significativos mientras minimiza los falsos positivos por ruido y variación de densidad.
Comparación Multiescala de Modelo a Modelo de Nubes (M3C2)
M3C2 es el algoritmo de última generación actual para la detección de cambios en nubes de puntos, desarrollado por Lague, Brodu y Leroux (2013) y ampliamente adoptado en geomorfología y monitorización de infraestructuras. M3C2 aborda las limitaciones de C2C calculando distancias a lo largo de la dirección normal a la superficie local a una escala apropiada para la rugosidad de la superficie, con intervalos de confianza estadísticamente rigurosos.
El algoritmo M3C2 funciona de la siguiente manera:
Cálculo del vector normal en cada punto de la nube de referencia ajustando un plano a la vecindad local. El radio de vecindad (D/2) se elige para que coincida con la escala de las características superficiales que se analizan — radios más pequeños para características de escala fina como grietas, radios más grandes para patrones de deformación amplia. Para la monitorización de infraestructuras, los radios típicos van desde 10 cm para análisis detallado de grietas hasta 1 m para evaluación general de deformaciones.
Proyección y cálculo de distancia a lo largo de la dirección normal. Para cada punto en la nube de referencia, un cilindro de radio d (escala de proyección) se orienta a lo largo del vector normal. Se identifican los puntos de ambas nubes, referencia y objetivo, que caen dentro de este cilindro. La distancia entre los dos conjuntos de puntos a lo largo de la dirección normal se calcula como la diferencia entre sus posiciones medias a lo largo del vector normal. La escala de proyección d se establece típicamente en 2-5 veces el espaciado medio de puntos para asegurar suficientes puntos para un cálculo robusto de la media.
Estimación del intervalo de confianza utilizando la rugosidad local de la nube de puntos y el número de puntos. El algoritmo M3C2 calcula un intervalo de confianza del 95% (o cualquier nivel de confianza especificado) para la medición de distancia en cada punto, basado en la desviación estándar de los puntos dentro del cilindro de proyección y el número de puntos. Los cambios menores que el intervalo de confianza no son estadísticamente significativos y no deben interpretarse como deformación real. Este control de calidad estadístico incorporado es la ventaja clave de M3C2 sobre métodos más simples.
Análisis multiescala permite al operador analizar cambios en múltiples escalas espaciales simultáneamente. El análisis de escala fina (D/2 y d pequeños) detecta características pequeñas como apertura de grietas y límites de desconchamiento. El análisis de escala gruesa (D/2 y d grandes) detecta deformaciones amplias como deflexión de puentes y asentamiento diferencial. Comparar resultados entre escalas puede distinguir el cambio superficial (erosión, deposición, desconchamiento) de la deformación (desplazamiento estructural, inclinación, asentamiento).
Para la monitorización de infraestructuras, M3C2 logra una sensibilidad de detección de 0.5-2 mm para nubes de puntos de escáner láser terrestre con densidades que exceden los 500 puntos/m². Para nubes de puntos fotogramétricas (que típicamente tienen más ruido que los datos TLS), la sensibilidad de detección es de 2-5 mm dependiendo de la textura de la superficie, la calidad de la imagen y la geometría del levantamiento. El algoritmo está implementado en el software de código abierto CloudCompare y es el método estándar para la detección de cambios en nubes de puntos en aplicaciones de infraestructura a nivel mundial.
Método de Detección de Cambios en Nubes de Puntos
Umbral de Detección Típico
Intervalo de Confianza
Mejor Aplicación
C2C (Nube a Nube)
2-5 mm
No disponible
Cribado rápido, detección de grandes cambios
C2M (Nube a Malla)
1-3 mm
Parcial
Análisis de deformación contra superficie de referencia
M3C2
0.5-2 mm (TLS), 2-5 mm (foto)
Sí (especificado por usuario)
Monitorización cuantitativa de deformaciones, cambio riguroso
PCA en características de nube de puntos
2-10 mm
Estadístico
Detección de patrones de cambio, no solo magnitud
Modelo Digital de Elevación de Diferencias (DOD)
El DOD compara Modelos Digitales de Elevación (DEM) o Modelos Digitales de Superficie (DSM) generados a partir de nubes de puntos en cada época de levantamiento. Los dos DEM se restan para producir un ráster de diferencia donde cada valor de píxel representa el cambio de elevación en esa ubicación. El DOD es computacionalmente eficiente porque opera sobre rejillas regulares en lugar de nubes de puntos no estructuradas, y los resultados son fáciles de visualizar e interpretar como mapas de calor de cambio de elevación.
La precisión del DOD depende de la calidad de generación del DEM — la interpolación de nubes de puntos irregulares a rejillas regulares introduce incertidumbre adicional. El Nivel de Detección (LoD) para DOD se calcula como LoD = t × √(σ_referencia² + σ_seguimiento²), donde σ es la incertidumbre de elevación de cada DEM y t es el valor t de Student para el nivel de confianza deseado (típicamente t = 1.96 para 95% de confianza). El DOD es más apropiado para monitorear cambios de volumen a granel — pérdida de material por erosión o desconchamiento, acumulación de material por sedimento o escombros, y asentamiento o levantamiento a gran escala. Es menos adecuado para la detección de defectos de escala fina donde se necesitan detalles individuales de grietas o desconchamientos.
Cadencia de Levantamientos Repetidos con Drones
Determinación de la Frecuencia de Levantamiento
El intervalo óptimo entre levantamientos repetidos para la detección de cambios depende de la tasa de deterioro, la criticidad del activo, los requisitos reglamentarios y el cambio mínimo detectable del sistema de medición. El principio fundamental es que el intervalo de levantamiento debe ser lo suficientemente corto para que el deterioro esperado durante el intervalo supere el umbral de detección del análisis de cambios, pero lo suficientemente largo para que los cambios acumulados sean operativamente significativos y económicamente justificados.
Para pavimentos de aeropuertos bajo los marcos de cumplimiento del Anexo 14 de la OACI, la cadencia de levantamiento típica es:
Levantamientos anuales para todos los pavimentos operacionales (pistas, calles de rodaje, plataformas) como parte del monitoreo rutinario de condición. Los levantamientos anuales establecen la tasa de deterioro de referencia e identifican áreas que requieren atención más frecuente. El Anexo 14 de la OACI, Sección 10.2 requiere que “la superficie de los pavimentos se inspeccione a intervalos regulares” y que “la frecuencia de las inspecciones se determinará por el tipo y volumen de tráfico y las condiciones climáticas prevalecientes.”
Levantamientos trimestrales para pavimentos en mal estado (PCI < 40) o con deterioro activo conocido. La detección de cambios trimestral rastrea la efectividad del mantenimiento provisional y proporciona una alerta temprana de deterioro rápido que puede requerir intervención estructural.
Levantamientos mensuales para pavimentos bajo observación por defectos críticos — grietas cerca de bordes de pavimento que podrían provocar desconchamiento, áreas de asentamiento activo o secciones de pavimento sujetas a operaciones de alto esfuerzo (por ejemplo, extremos de pista donde las aeronaves giran y aplican alto torque).
Levantamientos posteriores a eventos después de eventos climáticos extremos (lluvias intensas, ciclos de congelación-descongelación, calor extremo), después de eventos de carga inusuales (aeronaves con sobrepeso, aterrizajes duros), o después de intervenciones de mantenimiento para verificar la efectividad.
Para estructuras de puentes, los intervalos de inspección se rigen por las normas nacionales de inspección de puentes (por ejemplo, NBIS en Estados Unidos, DIN 1076 en Alemania, directrices BASt en Europa). Las inspecciones visuales rutinarias son típicamente bienales, pero los levantamientos de detección de cambios para defectos conocidos pueden realizarse con diferentes frecuencias:
Levantamientos bienales para puentes en buen estado sin defectos significativos conocidos. Estos establecen tasas de deterioro de referencia para comparación con levantamientos futuros.
Levantamientos anuales para puentes con defectos conocidos bajo observación — grietas en miembros críticos, corrosión en componentes de acero, vulnerabilidad por socavación o movimiento en apoyos.
Levantamientos trimestrales a semestrales para puentes con deterioro activo que se monitorea por tasa de progresión, verificación posterior a la reparación, o puentes con vida útil remanente inferior a 5 años.
Requisitos de Consistencia de Datos
La detección confiable de cambios en levantamientos repetidos requiere un control cuidadoso de los parámetros de recopilación de datos para minimizar las diferencias no físicas entre épocas. Los requisitos clave de consistencia incluyen:
Distancia de Muestreo en el Terreno (GSD) debe ser consistente entre levantamientos dentro del 10-20%. Los cambios significativos en GSD alteran la resolución espacial a la que se miden los defectos y pueden introducir cambios aparentes que son puramente artefactos de diferencias de resolución. La consistencia de GSD se logra volando a la misma altitud con el mismo sensor de cámara en todas las épocas de levantamiento.
Condiciones de iluminación deben ser lo más consistentes posible. Los levantamientos realizados bajo luz solar directa producen sombras fuertes de grietas y textura superficial que difieren de los levantamientos bajo iluminación nublada. La práctica recomendada es realizar todos los levantamientos repetidos bajo condiciones de iluminación similares — preferiblemente nublado con iluminación difusa, que minimiza las sombras y proporciona la apariencia superficial más uniforme para la detección de defectos.
Humedad superficial debe ser consistente. Las superficies de pavimento mojadas se ven significativamente diferentes de las secas — las grietas se llenan de agua y se vuelven menos visibles, las manchas superficiales parecen más oscuras y la reflectancia general disminuye. Los levantamientos deben realizarse solo cuando la superficie del pavimento esté seca (mínimo 48 horas desde la última lluvia para concreto, 24 horas para asfalto).
Parámetros de cámara y sensor — tiempo de exposición, apertura, ISO, distancia de enfoque — deben ser consistentes. Las configuraciones automáticas de exposición (auto-exposición, auto-ISO) deben desactivarse en favor de configuraciones fijas determinadas durante la planificación del levantamiento para garantizar una radiometría de imagen consistente entre épocas.
Trayectoria de vuelo y superposición debe seguir el mismo plan de misión en todas las épocas de levantamiento. El uso de planes de vuelo preprogramados con los mismos puntos de ruta, altitud, velocidad y configuraciones de superposición garantiza una geometría de observación consistente, lo que simplifica el registro y reduce las diferencias geométricas entre levantamientos.
Alertas de Detección de Cambios
Configuración de Umbrales de Alerta
Las alertas de detección de cambios traducen mediciones cuantitativas de cambio en notificaciones procesables para los gestores de infraestructuras. Los umbrales de alerta definen la magnitud del cambio que desencadena una notificación, categorizada por nivel de severidad para apoyar la priorización de respuesta adecuada. La configuración de los umbrales depende del tipo de defecto, la criticidad del activo y el contexto operativo.
Para alertas de crecimiento de grietas, los umbrales se basan típicamente en el aumento del ancho de grieta:
Nivel de vigilancia — aumento de ancho de grieta de 0.3-0.5 mm entre levantamientos. Indica posible agrietamiento activo. No se requiere acción inmediata pero se recomienda aumentar la frecuencia de monitoreo. Verificación mediante inspección en terreno durante la próxima visita programada.
Nivel de advertencia — aumento de ancho de grieta de 0.5-1.5 mm entre levantamientos. Indica agrietamiento activo confirmado. Se recomienda evaluación de ingeniería para determinar la causa y evaluar las implicaciones estructurales. Programar inspección detallada dentro de 30-60 días.
Nivel de alarma — aumento de ancho de grieta que excede 1.5 mm entre levantamientos (o cualquier ancho de grieta individual que exceda 5 mm, según las directrices de severidad ASTM D5340). Indica deterioro que progresa rápidamente. Se requiere evaluación de ingeniería inmediata. Restringir la carga si la grieta está en un elemento estructural crítico. Programar reparación dentro de 30 días.
Para alertas de crecimiento de desconchamiento, los umbrales se basan en el aumento de área:
Nivel de vigilancia — aumento de área de desconchamiento del 10-25% con respecto a la referencia. Monitorear en el próximo ciclo de levantamiento.
Nivel de advertencia — aumento de área de desconchamiento del 25-50% o profundidad de desconchamiento que supera la profundidad del recubrimiento. Programar evaluación detallada. Evaluar la presencia de material suelto que podría convertirse en DEO (Detritos Extraños Objetos) para pavimentos de aeródromos.
Nivel de alarma — aumento de área de desconchamiento que excede el 50% con respecto a la referencia, o cualquier nuevo desconchamiento que exceda 25 cm en su dimensión máxima en pavimentos de aeródromos (según las directrices de Detritos Extraños Objetos de la OACI). Se requiere inspección en terreno inmediata. Retirar material suelto. Programar reparación dentro de 7-14 días.
Para alertas de propagación de corrosión, los umbrales se basan en la cobertura y el cambio de categoría de severidad:
Nivel de vigilancia — aumento de cobertura de corrosión del 5-15% del área afectada, o progresión de Ri2 a Ri3 según ISO 4628-3. Monitorear en el próximo levantamiento.
Nivel de advertencia — aumento de cobertura de corrosión del 15-30% o progresión de Ri3 a Ri4. Evaluación de ingeniería para la condición del recubrimiento y la integridad del sustrato. Planificar reapintado dentro de 6-12 meses.
Nivel de alarma — cobertura de corrosión que excede el 30% o progresión a Ri5. Evaluación inmediata de la capacidad estructural. Para miembros de puentes de acero, evaluación de pérdida de sección mediante medición de espesor ultrasónica. Planificar intervención dentro de 1-3 meses.
Marco de Alertas Multinivel
La alerta efectiva de detección de cambios opera en múltiples niveles en cascada para evitar abrumar a los gestores de infraestructuras con notificaciones, al tiempo que garantiza que los cambios críticos no se pasen por alto:
Nivel 1 — Alerta Estadística se activa cuando la magnitud del cambio supera un umbral estadístico derivado del ruido de medición. Esta es la alerta de nivel más bajo, que indica que el cambio observado es estadísticamente significativo (supera el intervalo de confianza del 95% del sistema de medición). Se esperan muchas alertas de nivel 1 durante el monitoreo rutinario y no requieren atención inmediata.
Nivel 2 — Alerta Operativa se activa cuando la magnitud del cambio supera un umbral predefinido que la experiencia ha demostrado que indica deterioro activo que requiere atención. Las alertas operativas son específicas de cada activo y tipo de defecto, calibradas en función de datos históricos de deterioro y registros de mantenimiento.
Nivel 3 — Alerta Crítica se activa cuando la magnitud del cambio indica una preocupación inmediata de seguridad — crecimiento rápido de grietas en un miembro estructural crítico, asentamiento repentino de un estribo de puente, o desarrollo de desconchamiento que podría generar DEO en una pista activa. Las alertas críticas requieren notificación inmediata del personal responsable y respuesta acelerada en cuestión de horas a días.
El marco de alertas también debe incorporar consistencia temporal — los cambios que persisten o crecen en múltiples épocas de levantamiento reciben mayor prioridad que los cambios aislados que no progresan. Una grieta que muestra un crecimiento de 0.4 mm en un intervalo de levantamiento pero se estabiliza en el siguiente debe ser degradada de Advertencia a Vigilancia, mientras que una grieta que muestra un crecimiento consistente de 0.3-0.5 mm en cada uno de tres levantamientos consecutivos debe ser escalada.
Integración con Modelos de Deterioro
De la Detección de Cambios a la Predicción del Deterioro
Los datos de detección de cambios proporcionan la base empírica para los modelos de deterioro que predicen estados de condición futuros y la vida útil remanente. La integración de la detección de cambios con la modelización del deterioro transforma el mantenimiento reactivo — reparar defectos cuando alcanzan una condición crítica — en planificación de mantenimiento proactiva basada en la condición, donde las intervenciones se programan según las trayectorias de deterioro previstas.
Las curvas de deterioro empíricas se desarrollan graficando los resultados de la detección de cambios en múltiples épocas de levantamiento. Para cada tipo de defecto y elemento estructural, la tasa de cambio (crecimiento de ancho de grieta en mm/año, crecimiento de área de desconchamiento en cm²/año, aumento de cobertura de corrosión en %/año) se calcula a partir de la serie temporal de mediciones de levantamiento. Estas tasas empíricas se utilizan luego para proyectar estados de condición futuros asumiendo un deterioro continuo a la tasa observada. Para pavimentos de aeropuertos, la curva de deterioro del Índice de Condición de Pavimento (PCI) típicamente se modela como un decaimiento exponencial: PCI(t) = PCI_inicial × exp(-k × t), donde k es la constante de tasa de deterioro derivada de las mediciones de detección de cambios en múltiples ciclos de levantamiento.
Los modelos de deterioro probabilísticos incorporan la incertidumbre tanto en la medición como en la predicción. La detección de cambios proporciona no solo la magnitud del cambio sino también el intervalo de confianza para esa medición (de M3C2 o del análisis estadístico de cambios). Estas incertidumbres se propagan al modelo de deterioro, produciendo límites de confianza en la condición futura prevista. Un modelo de cadena de Markov, por ejemplo, utiliza los datos de detección de cambios para estimar probabilidades de transición entre estados de condición, con intervalos de confianza que reflejan la incertidumbre de medición en cada época.
La predicción de deterioro mediante aprendizaje automático utiliza la secuencia temporal de mediciones de detección de cambios como características para predecir la condición futura. Las redes neuronales recurrentes (RNN) y las redes de memoria a largo plazo (LSTM) son particularmente adecuadas para esta tarea porque aprenden patrones temporales directamente de la secuencia de mediciones de levantamiento. Las características de entrada incluyen series temporales de ancho de grieta, series temporales de área de desconchamiento, valores de PCI y covariables ambientales (ciclos de temperatura, precipitación, eventos de congelación-descongelación). La salida del modelo es la condición prevista en puntos temporales futuros con intervalos de predicción asociados.
Bucle de Retroalimentación con Acciones de Mantenimiento
La detección de cambios también permite la evaluación cuantitativa de la efectividad del mantenimiento mediante la comparación antes y después. Cuando se repara un defecto — grieta sellada, desconchamiento parcheado, corrosión tratada — el análisis de detección de cambios entre el levantamiento previo a la reparación y el primer levantamiento posterior a la reparación verifica que el defecto ya no está presente. Los levantamientos subsiguientes rastrean si la reparación sigue siendo efectiva o si el defecto recurre.
El seguimiento de durabilidad de reparaciones en múltiples ciclos de levantamiento proporciona datos sobre el tiempo medio de reaparición de defectos después de diferentes métodos de reparación. Estos datos informan la planificación de mantenimiento al identificar las estrategias de reparación más duraderas para cada tipo de defecto bajo condiciones ambientales y de carga específicas. Por ejemplo, si la detección de cambios revela que el sellado de grietas en una sección particular de pista tiene un tiempo de reaparición medio de 18 meses mientras que el ranurado y sellado tiene un tiempo de reaparición medio de 36 meses, el mayor costo inicial del ranurado y sellado se justifica por la vida útil extendida.
La contratación de mantenimiento basada en desempeño utiliza datos de detección de cambios para verificar que los contratistas de mantenimiento han logrado los resultados de desempeño especificados. Un contrato puede especificar que el ancho de grieta en áreas tratadas no debe exceder el 125% del ancho posterior a la reparación durante al menos 24 meses. Los levantamientos de detección de cambios a los 6, 12 y 24 meses posteriores a la reparación proporcionan una verificación objetiva del cumplimiento, con el pago vinculado al desempeño demostrado en lugar de simplemente a la finalización del trabajo.
Software y Automatización para la Detección de Cambios
Herramientas Comerciales y de Código Abierto
CloudCompare es el principal software de código abierto para la detección de cambios en nubes de puntos, implementando los métodos M3C2, C2C, C2M (Nube a Malla) y DOD. Soporta formatos LAS, LAZ, PLY y otros formatos comunes de nubes de puntos, proporciona procesamiento por lotes para flujos de trabajo automatizados e incluye herramientas de visualización para mapas de cambio codificados por colores. CloudCompare funciona en Windows, macOS y Linux y es el estándar de facto para el análisis de cambios en nubes de puntos en la monitorización de infraestructuras.
Agisoft Metashape soporta la comparación de ortomosaicos y DEM para la detección de cambios a través de su flujo de trabajo para el cálculo de diferencias entre proyectos procesados. El software proporciona registro automatizado de imágenes entre levantamientos utilizando la red común de PCG, y los ortomosaicos resultantes pueden compararse píxel a píxel o mediante la herramienta integrada de diferencias de DEM. La API de Python de Metashape permite la programación de flujos de trabajo de detección de cambios para el procesamiento por lotes de múltiples pares de levantamientos.
Pix4Dmapper y Pix4Dmatic incluyen capacidades de comparación de ortomosaicos y MDS, con informes automatizados de detección de cambios que resaltan áreas de diferencia de elevación significativa. El informe de calidad de Pix4D incluye estimaciones de precisión por píxel que informan la significancia estadística de los cambios detectados.
TarmacView proporciona detección de cambios especializada para infraestructura de pavimentos de aeropuertos, comparando ortomosaicos y mapas de grietas en levantamientos repetidos con clasificación automatizada de cambios. La plataforma rastrea el crecimiento de grietas (ancho y longitud), la formación de nuevas grietas, los cambios de área de desconchamiento y las tendencias de deterioro del PCI. Los resultados de la detección de cambios se visualizan como mapas de superposición sobre el ortomosaico actual, con severidad de cambio codificada por colores y generación automatizada de alertas para cambios que exceden umbrales configurables.
Flujos de Trabajo de Procesamiento Automatizado
La automatización completa de la detección de cambios requiere un flujo de trabajo integrado que maneje todos los pasos de procesamiento, desde la ingesta de datos hasta la generación de informes:
Paso 1 — Ingesta de Datos: Importar nuevos datos de levantamiento (imágenes, registros GNSS, coordenadas PCG) y recuperar los datos de levantamiento de referencia correspondientes de la base de datos de activos. Validar que ambos levantamientos cubran la misma área del activo y cumplan con los requisitos de calidad.
Paso 2 — Registro: Realizar el registro automatizado del nuevo ortomosaico o nube de puntos con respecto a la referencia de línea base. Para ortomosaicos, utilizar registro basado en características con SIFT o AKAZE seguido de registro fino basado en intensidad. Para nubes de puntos, aplicar registro grueso utilizando PCG o ICP (Punto Más Cercano Iterativo) seguido de registro fino.
Paso 3 — Cálculo de Cambios: Aplicar el método de detección de cambios seleccionado — diferenciación de imágenes para cambios de intensidad, M3C2 para deformación de nubes de puntos, comparación basada en objetos para cambios en grietas y desconchamientos. Calcular estadísticas de cambio con intervalos de confianza.
Paso 4 — Clasificación: Clasificar los cambios detectados por tipo (crecimiento de grieta, nueva grieta, propagación de desconchamiento, corrosión, deformación), nivel de severidad y ubicación espacial. Asignar cada objeto de cambio a su componente de activo correspondiente.
Paso 5 — Generación de Alertas: Comparar las magnitudes de cambio con los umbrales configurados para cada tipo de defecto y ubicación. Generar alertas de nivel 1, nivel 2 o nivel 3 según corresponda. Registrar las alertas en el sistema de gestión de activos con referencia espacial, magnitud de cambio, intervalo de confianza y sello de tiempo.
Paso 6 — Generación de Informes: Producir informes de detección de cambios que incluyan mapas de cambio (superposición sobre el ortomosaico actual), estadísticas resumidas (cambio de longitud total de grietas, recuento de nuevos defectos, tendencia de PCI), datos detallados por defecto (historial de ancho de grieta, historial de área de desconchamiento) y acciones recomendadas basadas en los niveles de alerta.
Paso 7 — Actualización de Base de Datos: Actualizar la base de datos de condición de activos con los nuevos resultados de detección de cambios. Añadir datos de series temporales para cada defecto y elemento de activo. Actualizar las curvas de deterioro con el nuevo punto de medición. Recalcular la condición prevista y la vida útil remanente si los modelos de deterioro están integrados.
Aseguramiento de Calidad para la Detección Automatizada de Cambios
La detección automatizada de cambios requiere un aseguramiento de calidad sistemático para garantizar que los cambios reportados sean reales y no artefactos de errores de procesamiento:
Verificación de calidad de registro: El RMSE de registro entre levantamientos debe estar por debajo del umbral del proyecto (típicamente 0.5 píxeles para ortomosaicos, 0.5 cm para nubes de puntos). Si la calidad del registro es insuficiente, los resultados de la detección de cambios se marcan para revisión manual.
Cribado de falsos positivos: Los resultados de detección de cambios se criban contra indicadores conocidos de no cambio: áreas de agua estancada (detectadas mediante imágenes infrarrojas o térmicas), áreas de mantenimiento reciente (registradas en el sistema de gestión de activos) y áreas con contaminación superficial conocida (derrames de petróleo, acumulación de caucho en pistas).
Verificación de consistencia temporal: Los cambios que aparecen en un solo intervalo de levantamiento pero no se confirman en levantamientos subsiguientes se marcan como potencialmente transitorios — manchas superficiales que se lavan, patrones de humedad que varían con el clima, o escombros que se retiran. Los cambios persistentes reciben calificaciones de confianza más altas.
Muestra de revisión manual: Una muestra estadísticamente válida de los cambios detectados es revisada por un inspector calificado para cada ciclo de levantamiento. El tamaño de la muestra se calcula para lograr un 95% de confianza de que la tasa de falsos positivos del sistema automatizado está por debajo del umbral aceptable (típicamente 5-10% para alertas de nivel de vigilancia, 1-2% para alertas de nivel de alarma).
Conclusión
La detección de cambios transforma la inspección de infraestructura de una instantánea estática de condición en un registro temporal dinámico de deterioro, reparación y comportamiento estructural. Al co-registrar precisamente imágenes y nubes de puntos de levantamientos repetidos, la detección de cambios cuantifica la sutil progresión milimétrica de grietas, desconchamientos, corrosión y deformaciones que sería invisible en una sola inspección pero que, acumulada a lo largo del tiempo, determina la vida útil del activo.
La metodología integra un registro geométrico riguroso — basado en características, basado en intensidad o georreferenciado utilizando PCG — con un análisis estadístico de cambios que separa el deterioro real del ruido de medición. La selección del método de detección de cambios depende del tipo de defecto y la sensibilidad requerida: diferenciación de imágenes para cambios de apariencia superficial, M3C2 para deformación de nubes de puntos, comparación basada en objetos para cambios de geometría de grietas y desconchamientos, y métodos de aprendizaje automático para clasificación automatizada con alta precisión.
Para pavimentos de aeropuertos, puentes e infraestructuras críticas, la detección de cambios proporciona la base de datos para el mantenimiento basado en condición, la modelización del deterioro y la asignación de presupuesto informada por riesgos. Permite a los gestores de infraestructuras identificar el deterioro acelerado antes de que alcance niveles críticos, verificar la efectividad de las intervenciones de mantenimiento y optimizar el momento y alcance de las actividades de reparación. La integración de la detección de cambios con flujos de trabajo de procesamiento automatizado, marcos de alertas y modelos de deterioro crea un sistema de gestión de condición de bucle cerrado que mejora continuamente la calidad de las decisiones de mantenimiento a través de evidencia empírica de tasas de deterioro y durabilidad de reparaciones.
TarmacView implementa la detección de cambios como una capacidad central de su plataforma de inspección de pavimentos de aeropuertos, permitiendo el seguimiento automatizado del crecimiento de grietas, la propagación de desconchamientos y las tendencias de condición en sucesivos levantamientos con drones. La plataforma aplica un registro riguroso y un control de calidad estadístico para garantizar que los cambios reportados sean reales y procesables, proporcionando a los gestores de infraestructuras evidencia cuantitativa para la planificación de mantenimiento y la elaboración de informes de cumplimiento bajo las normas del Anexo 14 de la OACI y ASTM D5340.
Preguntas Frecuentes
La detección de cambios es una técnica de análisis temporal que compara imágenes, ortomosaicos o nubes de puntos co-registrados del mismo activo de infraestructura capturados en diferentes momentos. Identifica y cuantifica diferencias como nuevas grietas, crecimiento de grietas, agrandamiento de desconchamientos, propagación de corrosión, deformación superficial y asentamientos. El proceso requiere un registro preciso de imágenes o alineación de nubes de puntos para que solo los cambios físicos reales — no los artefactos de desalineación — aparezcan en el análisis de diferencias.
Para la detección de cambios a nivel de píxel, la precisión del registro debe ser sub-píxel — típicamente mejor que 0.5 píxeles RMSE. Con una distancia de muestreo en el terreno (GSD) de 1 mm/píxel, esto se traduce en una precisión de registro de 0.5 mm. Errores de registro mayores a 1 píxel producen señales de cambio falsas en bordes y límites de textura que pueden abrumar los cambios reales de defectos. El registro basado en características utilizando características invariantes de escala y rechazo de valores atípicos RANSAC alcanza rutinariamente una precisión de 0.3-0.8 píxeles. El geoetiquetado RTK/PPK combinado con PCG permite un registro sub-píxel consistente en levantamientos repetidos.
La detección de cambios en grietas típicamente combina análisis a nivel de píxel y a nivel de objeto. Los métodos a nivel de píxel detectan cambios en la densidad de píxeles de grietas dentro de vecindarios locales entre pasos temporales. Los métodos a nivel de objeto primero vectorizan las grietas en cada época del levantamiento, luego comparan los mapas de grietas calculando cambios de ancho en ubicaciones coincidentes, extensión de longitud de grietas existentes y densidad de formación de nuevas grietas. El módulo de Detección Temporal de Cambios en Grietas basado en el grupo de Lie (LTCCD) y los métodos guiados por PDE son enfoques avanzados que rastrean la evolución de grietas con precisión sub-píxel modelando los límites de las grietas como frentes de propagación.
La Comparación Multiescala de Modelo a Modelo de Nubes (M3C2) es un algoritmo estadísticamente riguroso para calcular distancias entre dos nubes de puntos. A diferencia de los métodos simples de vecino más cercano, M3C2 calcula distancias a lo largo de la dirección normal de la superficie local a múltiples escalas, proporcionando intervalos de confianza para cada medición de distancia. Tiene en cuenta la rugosidad de la nube de puntos, la variación de densidad y la incertidumbre del registro. M3C2 es el método estándar para la monitorización de deformaciones a partir de levantamientos LiDAR o fotogramétricos repetidos, logrando una sensibilidad sub-milimétrica cuando la densidad de la nube de puntos supera los 500 puntos/m².
La cadencia del levantamiento depende de la tasa de deterioro, la criticidad del activo y los requisitos reglamentarios. Para pavimentos de aeropuertos bajo el Anexo 14 de la OACI, las inspecciones visuales son típicamente anuales, pero los levantamientos de detección de cambios para zonas de deterioro activo pueden ser trimestrales o mensuales. Los tableros de puentes con grietas conocidas pueden inspeccionarse cada 6 meses durante el deterioro activo y cada 2-3 años para el seguimiento rutinario de condición. El cambio mínimo detectable es aproximadamente 2.5-3 veces la precisión del levantamiento (95% de confianza), por lo que la frecuencia del levantamiento debe calibrarse de modo que el deterioro esperado durante el intervalo supere el umbral de detección.
La alerta de detección de cambios utiliza umbrales multinivel: (1) umbrales de magnitud de cambio a nivel de píxel para filtrar ruido; (2) umbrales de área mínima de agrupación espacial para eliminar artefactos de píxeles aislados; (3) verificaciones de consistencia temporal que requieren que los cambios persistan o crezcan en múltiples levantamientos; y (4) clasificación de severidad (por ejemplo, aumento de ancho de grieta >0.5 mm activa vigilancia, >1.5 mm activa alarma). Las alertas se configuran típicamente por tipo de defecto — las alertas de crecimiento de grietas usan umbrales de aumento de ancho, las alertas de desconchamiento usan umbrales de aumento de área, y las alertas de deformación usan umbrales de magnitud de desplazamiento.
Sí. Los flujos de trabajo de detección de cambios típicamente clasifican los cambios detectados en tres categorías: (1) defectos nuevos — áreas que fueron clasificadas como sanas en el levantamiento de referencia pero muestran píxeles de grieta o desconchamiento en el levantamiento de seguimiento; (2) defectos que empeoran — grietas existentes que han aumentado en ancho, longitud o densidad; y (3) defectos reparados — áreas donde defectos previamente identificados ya no están presentes después del mantenimiento. Esta clasificación requiere un co-registro preciso de los mapas de defectos entre las épocas del levantamiento, utilizando típicamente redes de grietas vectorizadas o etiquetas de defectos píxel a píxel con correspondencia temporal.
Varias plataformas soportan la detección de cambios en infraestructura: CloudCompare (código abierto) implementa los algoritmos M3C2, C2C y C2M para comparación de nubes de puntos; Metashape y Pix4D soportan comparación de ortomosaicos y diferenciación de MDE; Cyclone Register 3D y FARUS Scene manejan análisis de series temporales LiDAR. TarmacView proporciona detección de cambios especializada para pavimentos de aeropuertos, comparando ortomosaicos y mapas de grietas en levantamientos repetidos con clasificación automatizada de cambios, medición de crecimiento de grietas y análisis de tendencias según las normas ASTM D5340 y las directrices de la OACI.
Detección Automatizada de Cambios para Infraestructura
TarmacView permite la detección automatizada de cambios en levantamientos repetidos con drones de pavimentos de aeropuertos, puentes e infraestructuras. Realice un seguimiento del crecimiento de grietas, el agrandamiento de desconchamientos y las tendencias de deterioro con precisión cuantitativa. Identifique cambios tempranamente y optimice la planificación de mantenimiento.
Detección de Grietas Basada en IA para Inspección de Infraestructura
La detección de grietas basada en IA utiliza visión por computadora — redes neuronales convolucionales, transformadores de visión y modelos de segmentación semá...
La segmentación de grietas es la tarea de visión por computadora que clasifica cada píxel de una imagen como grieta o no grieta, produciendo una máscara binaria...
Inspección automatizada de infraestructura con drones
La inspección automatizada con drones utiliza rutas de vuelo preprogramadas, visión artificial y análisis de IA para inspeccionar activos de infraestructura, in...
42 min de lectura
Drone Inspection
Automation
+6
Consentimiento de Cookies Usamos cookies para mejorar tu experiencia de navegación y analizar nuestro tráfico. See our privacy policy.