Termografía Infrarroja Basada en Drones (Drone IRT)
La termografía infrarroja basada en drones monta cámaras térmicas en UAV para inspeccionar rápidamente tableros de puentes y pavimentos en busca de delaminaciones, despegues y humedad desde el aire, cubriendo grandes áreas sin interrupción del tráfico. El análisis mediante IA de patrones térmicos automatiza la detección de defectos. Abarca el diseño de sistemas drone IRT, planificación de vuelos para estudios térmicos, procesamiento de datos e integración con inspección visual RGB.
Termografía Infrarroja Basada en Drones para la Inspección de Puentes y Pavimentos
Componentes del Sistema Drone IRT
Un sistema de termografía infrarroja basada en drones (drone IRT) comprende varios subsistemas críticos que deben funcionar conjuntamente para producir datos térmicos precisos y georreferenciados adecuados para la detección de defectos subsuperficiales. El payload de la cámara térmica es el sensor principal — típicamente una cámara infrarroja de onda larga (LWIR) basada en microbolómetro no refrigerado que opera en la banda espectral de 7.5–14 µm. Los payloads más comunes incluyen la DJI Zenmuse H20T (resolución de 640×512 píxeles, paso de píxel de 12 µm, diferencia de temperatura equivalente de ruido o NETD ≤50 mK, apertura f/1.0, precisión absoluta de ±2 °C o ±2%), la FLIR Vue Pro R (640×512, 12 µm, NETD <50 mK, calibración radiométrica, disponible con opciones de lente de 9 mm, 13 mm o 19 mm) y la Workswell WIRIS Pro (640×512, NETD 30 mK, zoom óptico continuo 10×, rango de medición de temperatura desde −20 °C hasta +1500 °C). Estas cámaras pesan entre 270 g y 460 g según el modelo y la configuración, compatibles con los límites de carga útil de drones multirrotores comerciales como el DJI Matrice 300 RTK (carga útil máxima 2.7 kg) o el DJI Matrice 350 RTK.
Estabilización mediante Cardán
La cámara térmica debe montarse en un cardán estabilizado de 3 ejes que aísle el sensor de la vibración del dron, el movimiento angular y la oscilación inducida por el viento. Sin estabilización mediante cardán, las frecuencias de vibración de los motores del dron (típicamente 150–400 Hz para multirrotores) y la dinámica de vuelo (movimientos de cabeceo, alabeo y guiñada durante las correcciones de rumbo) introducirían desenfoque por movimiento en las imágenes térmicas, degradando la resolución espacial y la precisión de la medición térmica. Los cardanes de alta gama, como la serie DJI Zenmuse, proporcionan una precisión de estabilización angular de 0.01°, permitiendo la captura nítida de imágenes térmicas incluso durante el vuelo hacia adelante a velocidades de hasta 15 m/s (54 km/h). El cardán también permite una orientación precisa de la cámara — fundamental para inspeccionar elementos verticales del puente (caras de pilas, estribos, almas de vigas) donde la cámara debe orientarse perpendicular a la superficie objetivo para evitar errores de medición de temperatura relacionados con la emisividad causados por la visualización fuera del ángulo. La mayoría de los cardanes admiten secuencias automatizadas de paneo e inclinación que pueden programarse en la misión de vuelo para una cobertura sistemática desde múltiples ángulos de geometrías complejas de puentes.
Integración de GPS RTK
El GPS Cinemático en Tiempo Real (RTK) es la columna vertebral del posicionamiento de un sistema drone IRT de grado profesional. El RTK proporciona una precisión de posicionamiento absoluto de 2–5 cm en horizontal y 3–7 cm en vertical mediante la corrección de errores de la señal GPS utilizando una estación base fija con coordenadas conocidas, transmitiendo datos de corrección al dron a través de enlace de radio (típicamente módems de radio de 900 MHz o 2.4 GHz, o redes celulares 4G/5G para operaciones en grandes áreas). El dron registra la posición RTK, altitud (sobre el nivel medio del mar), actitud (cabeceo, alabeo, guiñada) y la marca de tiempo del disparo de la cámara para cada imagen térmica — típicamente como metadatos EXIF o en un archivo de telemetría separado sincronizado con el evento de captura de imagen. Estos metadatos geoespaciales permiten un coregistro preciso entre las imágenes térmicas y los planos del puente, bases de datos GIS o nubes de puntos 3D de estudios LiDAR o fotogramétricos. Sin RTK, el GPS estándar proporciona solo una precisión de 2–5 m, insuficiente para localizar defectos de forma fiable en un tablero de puente donde la anomalía térmica puede tener solo 20–30 cm de diámetro. Algunos sistemas también integran corrección Cinemática Post-Procesada (PPK) para operaciones donde los enlaces de corrección RTK en tiempo real no están disponibles, procesando los datos de la estación base después del vuelo para lograr una precisión equivalente.
Componente
Función
Especificación Típica
Cámara Térmica LWIR
Capturar la distribución de temperatura superficial
640×512 px, paso de 12 µm, NETD ≤50 mK, 7.5–14 µm
Cardán de 3 Ejes
Estabilizar la cámara, aislar vibraciones
Precisión de estabilización de 0.01°, paneo continuo de 360°
Módulo GPS RTK
Georreferenciar imágenes con precisión sub-10 cm
2–5 cm horizontal, 3–7 cm vertical
Cámara RGB
Referencia visual, fusión de datos
20+ MP, sensor de 1 pulgada, obturador mecánico
Computadora a Bordo
Registro de datos, control de misión
16+ GB de almacenamiento, enlace descendente de telemetría en tiempo real
Sistema de Batería
Alimentar vuelo y payload
30–50 minutos de vuelo (híbrido), 20–30 min (eléctrico)
Integración de Cámara RGB
La mayoría de los payloads de drone IRT incorporan una cámara RGB de alta resolución colocada junto al sensor térmico, permitiendo la captura simultánea de imágenes de espectro visible y térmicas. El DJI Zenmuse H20T, por ejemplo, combina la cámara térmica con una cámara RGB gran angular de 20 MP, una cámara teleobjetivo de 12 MP (zoom óptico 2×) y un telémetro láser en un solo alojamiento con cardán. La captura simultánea RGB y térmica permite la fusión de imágenes — superponiendo los datos térmicos sobre la imagen visible para proporcionar contexto espacial para la interpretación de anomalías. Una imagen de referencia RGB ayuda al analista a distinguir entre anomalías térmicas reales relacionadas con defectos y señales falsas de características superficiales como manchas de aceite, depósitos de caucho, áreas parcheadas, marcas pintadas o escombros. Los procesos posteriores pueden generar productos de visualización en pantalla dividida o combinados donde la anomalía térmica (mostrada en falso color) se superpone semitransparentemente sobre la imagen RGB de alta resolución. Este producto fusionado es significativamente más interpretable para los ingenieros de puentes no familiarizados con la interpretación de termogramas sin procesar.
Planificación de Vuelos para Estudios Térmicos
Momento de Carga Solar
El factor más crítico para el éxito de un estudio pasivo de drone IRT es el momento de carga solar — realizar el estudio cuando el sol proporciona suficiente energía térmica para crear diferencias de temperatura medibles entre áreas defectuosas y sanas. La física es directa: la radiación solar penetra la superficie y conduce hacia abajo en el material. Una delaminación llena de aire (conductividad térmica 0.026 W/mK) bloquea este flujo de calor conductivo, provocando que la superficie sobre el defecto se caliente más rápido y alcance una temperatura más alta que el hormigón sano circundante (conductividad 1.7–2.5 W/mK). La magnitud de esta diferencia depende de la intensidad solar, el ángulo de incidencia, la transmisividad atmosférica y la duración de la exposición.
La investigación del Consejo de Investigación de Transporte de Virginia (Informe VTRC 20-R22) y las directrices de la FHWA establecen que la ventana de estudio óptima es de 5 a 9 horas después del amanecer para estudios diurnos (aproximadamente 10:00 AM–3:00 PM hora local en latitudes templadas durante finales de primavera hasta principios de otoño). Durante esta ventana, la radiación solar supera los 600 W/m² en la superficie bajo cielos despejados, y el contraste térmico entre el hormigón delaminado y el sano alcanza su máximo — típicamente 1.0–3.0 °C para tableros de hormigón sin recubrimiento. El pico de contraste térmico típicamente se retrasa respecto al mediodía solar de 1 a 3 horas debido a la inercia térmica de la masa de hormigón. Los estudios nocturnos (3–5 horas después del atardecer) proporcionan un contraste térmico inverso — el área delaminada está más cálida que el hormigón circundante porque el espacio de aire evita que el calor almacenado se disipe — y evitan los artefactos de sombreado causados por elementos de la superestructura del puente, edificios adyacentes o vegetación durante los estudios diurnos.
Factor
Condición Favorable
Condición Desfavorable
Hora del día
10:00–15:00 (diurno); 20:00–00:00 (nocturno)
Amanecer, atardecer, períodos de transición
Nubosidad
Cielo despejado (0–10% nubosidad)
Cubierto (>10% nubosidad), nubes dispersas
Irradiancia solar
>600 W/m²
<250 W/m²
Estado de la superficie
Seca, limpia
Mojada, cubierta de nieve, cubierta de escombros
Velocidad del viento
<15 mph (24 km/h)
>20 mph (32 km/h)
Estación
Finales de primavera a principios de otoño
Invierno (oct–feb en hemisferio norte)
El Departamento de Transporte de Wisconsin (WisDOT) y AECOM (estudio de 2024) recomiendan realizar estudios térmicos diurnos estrictamente entre las 11:00 AM y las 2:00 PM hora local en días despejados y soleados entre mayo y octubre en climas del norte de EE. UU. Para tableros de puentes con capas de rodadura asfáltica, se requiere una exposición solar más prolongada porque la capa de rodadura atenúa la señal térmica — la ventana recomendada se extiende a 6–10 horas después del amanecer. El DOT de Indiana ha determinado que la radiación solar debe superar los 500 W-h/m² de exposición acumulada total para una detección fiable de delaminaciones en tableros con capa de rodadura. La nubosidad, incluso las nubes dispersas temporales, reduce drásticamente el contraste térmico porque reemplaza la radiación solar directa (que proporciona ~900 W/m² al mediodía solar) por radiación difusa del cielo (típicamente 100–300 W/m²).
Altitud de Vuelo y Cobertura del Suelo
La altitud de vuelo determina tanto la resolución espacial (Distancia de Muestra en el Suelo) como la cobertura de área por imagen. La relación se deriva de la óptica geométrica básica: una altitud A dada y un campo de visión (FOV) horizontal de la cámara producen un ancho de barrido en el suelo W = 2 × A × tan(FOV/2). Para un DJI Zenmuse H20T con FOV horizontal de 24°, a 30 m de altitud el ancho de barrido es 2 × 30 × tan(12°) ≈ 12.8 m. A 60 m de altitud, el ancho de barrido se duplica a aproximadamente 25.5 m. Las altitudes más bajas proporcionan una mejor sensibilidad de detección de defectos pero requieren más líneas de vuelo para cubrir la misma área, aumentando el tiempo total de vuelo y el número de baterías necesarias.
La velocidad del estudio con dron debe coordinarse con la altitud y la tasa de cuadros de la cámara para garantizar suficiente superposición de imágenes. Para la generación de mosaicos térmicos, se recomienda un 70–80% de superposición frontal (a lo largo de la trayectoria) y un 60–70% de superposición lateral (entre trayectorias) — las mismas mejores prácticas fotogramétricas utilizadas para la generación de ortomosaicos RGB. A una velocidad de estudio típica de 5 m/s (18 km/h) y un intervalo de captura de cámara de 2 segundos, el desplazamiento frontal entre imágenes consecutivas es de 10 m. Para un GSD de 3 cm/píxel y una huella de imagen de 640 píxeles × 2.7 cm = 17.3 m, la superposición frontal es de 17.3 m − 10 m = 7.3 m, o 42% — por debajo del umbral recomendado. Para lograr un 70% de superposición frontal a 5 m/s, el intervalo de captura debe reducirse a aproximadamente (17.3 × 0.30) / 5 = 1.04 segundos, requiriendo una cámara capaz de mantener tasas de captura de 1 Hz sin sobrecalentamiento ni desbordamiento de búfer.
Requisitos de Superposición para Mosaicos Térmicos
Los altos requisitos de superposición para la generación de mosaicos térmicos presentan un desafío específico para el drone IRT. Las cámaras térmicas típicamente tienen tasas de cuadro más bajas (8–30 Hz) y velocidades de escritura de datos más lentas que las cámaras RGB, creando un cuello de botella para lograr la superposición frontal del 70–80% necesaria para un cosido de mosaicos de alta calidad. Las soluciones prácticas incluyen:
Velocidad de estudio reducida: Reducir la velocidad del dron a 3–4 m/s (10–14 km/h) permite que la cámara térmica capture imágenes con suficiente superposición. Esto extiende el tiempo de vuelo por área de estudio pero mejora la calidad del mosaico.
Patrones de vuelo con múltiples cuadrículas: Volar cuadrículas paralelas superpuestas (por ejemplo, alternando pasadas norte-sur y este-oeste) proporciona una cobertura redundante que mejora la solución fotogramétrica, incluso si las pasadas individuales tienen menor superposición frontal. La superposición lateral entre pasadas perpendiculares es efectivamente del 100%.
Tasa de captura adaptativa: El software moderno de planificación de vuelos como DJI Pilot 2, UgCS o Pix4Dcapture puede calcular intervalos de captura adaptativos al terreno que ajustan la tasa de cuadros según la velocidad y altitud del dron para mantener automáticamente la superposición objetivo.
La comunidad de investigación en inspección de puentes ha establecido que un ortomosaico térmico con GSD de 3–5 cm/píxel y precisión posicional de 5–10 cm (relativa a la verdad terreno RTK) es suficiente para identificar áreas delaminadas de tan solo 200 mm de diámetro — lo que corresponde al tamaño mínimo de defecto reportable en la mayoría de los manuales de inspección de puentes de los DOT estatales.
Resolución Térmica y Distancia de Muestra en el Suelo
Paso de Píxel y su Efecto en la Medición de Temperatura
La Distancia de Muestra en el Suelo (GSD) en imagen térmica define el área física en la superficie objetivo que corresponde a un solo píxel en el arreglo de imagen térmica. La fórmula es:
GSD = (Paso de Píxel × Altitud) / Distancia Focal
Donde el paso de píxel es el espaciado centro a centro de los elementos detectores del microbolómetro en el arreglo del sensor, la altitud es la distancia de la cámara a la superficie objetivo (sobre el nivel del suelo para estudios nadir), y la distancia focal es la distancia focal efectiva del sistema de lentes. Para el DJI Zenmuse H20T (12 µm de paso de píxel, 13.5 mm de distancia focal) a una altitud de 30 m sobre la superficie del tablero:
GSD = (0.012 mm × 30,000 mm) / 13.5 mm = 26.7 mm ≈ 2.7 cm/píxel
Cada imagen térmica de 640×512 píxeles a 30 m de altitud cubre un área de aproximadamente 17.3 m × 13.8 m, con cada píxel integrando la temperatura de un área superficial de 2.7 cm × 2.7 cm. La temperatura reportada para cada píxel es el promedio ponderado por área de todo lo que se encuentra dentro de esa huella de suelo — incluyendo hormigón, aberturas de grietas, escombros superficiales y cualquier sombra o humedad parcial. Este efecto de promediado significa que los defectos pequeños (más pequeños que 2–3 unidades de GSD) producen lecturas de temperatura que están parcialmente diluidas por el material sano circundante, reduciendo el contraste térmico aparente.
Modelo de Cámara
Distancia Focal
Altitud (m)
GSD (cm/px)
Ancho de Barrido (m)
Zenmuse H20T
13.5 mm
30
2.7
17.3
Zenmuse H20T
13.5 mm
50
4.4
28.8
Zenmuse H20T
13.5 mm
75
6.7
43.1
FLIR Vue Pro R (13 mm)
13 mm
30
2.8
17.7
FLIR Vue Pro R (19 mm)
19 mm
50
3.2
20.3
Workswell WIRIS Pro
25 mm
50
2.4
15.4
Para la detección de delaminaciones en tableros de puentes, un GSD de 3–5 cm/píxel es el rango operativo ampliamente recomendado. Con GSD más fino que 2 cm, el estudio se vuelve ineficiente porque el ancho de barrido estrecho requiere muchas líneas de vuelo paralelas, y el piso de ruido de la imagen térmica puede limitar la capacidad de distinguir entre píxeles adyacentes con diferencias de temperatura muy pequeñas. Con GSD más grueso que 8 cm, las delaminaciones pequeñas (200–300 mm de diámetro) pueden ocupar solo 3–6 píxeles — demasiado pocos para una detección fiable mediante análisis visual o algoritmos de IA. Los estudios de drone IRT de la Universidad de Nebraska-Lincoln encontraron que la probabilidad de detección para defectos más pequeños que 3× GSD cae por debajo del 60%, mientras que los defectos que cubren 10+ píxeles alcanzan tasas de detección superiores al 90%.
NETD y Diferencia de Temperatura Mínima Detectable
La Diferencia de Temperatura Equivalente de Ruido (NETD) — expresada en milikelvin (mK) — representa la diferencia de temperatura más pequeña que la cámara puede distinguir del piso de ruido térmico. Las cámaras modernas de microbolómetro LWIR utilizadas en drone IRT logran valores NETD de 20–50 mK (0.02–0.05 °C). Esto significa que la cámara puede detectar de forma fiable diferencias de temperatura de 0.05 °C o mayores entre píxeles adyacentes, asumiendo señal suficiente. Sin embargo, el ΔT mínimo práctico detectable para una anomalía térmica relacionada con un defecto es mayor que el NETD porque:
El ΔT observado entre áreas defectuosas y sanas debe exceder el NETD de la cámara por un factor de al menos 3–5× para una detección fiable (relación señal-ruido >3).
La atenuación atmosférica entre la cámara y el objetivo (incluso a altitudes de dron de 30–60 m) reduce el contraste térmico aparente en un 2–5% dependiendo de la humedad y la temperatura.
Las variaciones de emisividad superficial (hormigón 0.85–0.95, asfalto 0.90–0.97, agua 0.96, hormigón manchado de aceite 0.92) introducen errores de temperatura aparente de 0.2–0.5 °C incluso cuando la temperatura superficial real es uniforme.
El promediado espacial a través de la huella GSD diluye la señal térmica de defectos pequeños.
El ΔT mínimo práctico detectable para la inspección de tableros de puentes con drone IRT es de aproximadamente 0.5 °C en buenas condiciones (cielo despejado, viento bajo, >600 W/m² de irradiancia solar, superficie seca). En condiciones marginales (nubosidad fina, viento moderado, temprano en la mañana o al final de la tarde), el ΔT mínimo detectable aumenta a 1.0–1.5 °C. Las directrices de la FHWA establecen que los valores de ΔT por debajo de 0.5 °C deben considerarse no concluyentes y requieren verificación por otros métodos. Los valores típicos de ΔT relacionados con delaminaciones varían de 0.5 °C (marginal, defecto profundo bajo capa de rodadura) a 3 °C+ (señal fuerte, defecto superficial en tablero desnudo al mediodía solar).
Procesamiento de Datos y Generación de Mosaicos Térmicos
Calibración Radiométrica y Normalización
Los datos de imagen térmica sin procesar de cámaras montadas en drones consisten en conteos digitales de 14 o 16 bits que representan el flujo infrarrojo incidente en cada píxel detector. Convertir estos valores sin procesar a temperatura física requiere calibración radiométrica utilizando los datos de calibración de fábrica de la cámara — una función de transferencia polinómica que asigna los conteos digitales a la radiancia de la escena, combinada con correcciones para la temperatura interna de la cámara, el tiempo de integración y la transmisión óptica. La función de calibración es típicamente:
T = f(DN, T_carcasa, T_lente, R_humedad, R_distancia)
Donde DN es el valor digital sin procesar, T_carcasa y T_lente son las temperaturas internas de la cámara (medidas por sensores a bordo), R_humedad es la humedad relativa que afecta la transmisión atmosférica, y R_distancia es el rango de la cámara al objetivo. Las cámaras térmicas radiométricas modernas (DJI H20T, FLIR Vue Pro R) realizan estas correcciones a bordo para cada píxel y cada cuadro, generando datos calibrados en temperatura en formatos JPEG radiométricos (R-JPEG o TIFF con arreglos de temperatura incrustados).
Después de la calibración individual de imágenes, el mosaico térmico requiere normalización de temperatura porque el entorno térmico cambia durante el vuelo de estudio. La carga solar varía con el ángulo del sol a medida que el dron se mueve por el área de estudio (especialmente para tableros de puentes grandes o secciones de pavimento que requieren vuelos de 20–30 minutos). Un cambio de 15° en el ángulo de elevación solar durante un vuelo de estudio puede cambiar la temperatura superficial absoluta en 2–4 °C, creando un gradiente visible a través del mosaico térmico que no está relacionado con defectos subsuperficiales. Los algoritmos de normalización ajustan una superficie polinómica de orden bajo (típicamente de segundo orden) a la distribución de temperatura de fondo, luego restan esta superficie para aislar las anomalías térmicas locales. Enfoques alternativos incluyen la equalización de histogramas entre franjas de imágenes superpuestas o la normalización con placa de referencia utilizando referencias de cuerpo negro calibradas incluidas en el campo de visión del estudio.
Generación de Ortomosaicos Térmicos
La producción de un ortomosaico térmico georreferenciado sigue el flujo de trabajo fotogramétrico Structure-from-Motion (SfM), adaptado a las características de menor contraste y mayor ruido de las imágenes térmicas. La secuencia de procesamiento incluye:
Extracción de características: Las características térmicas distintivas — bordes de patrones de sombra, marcas de pavimento (que tienen diferente emisividad térmica), juntas de expansión, marcas de carriles y juntas de construcción — se detectan en imágenes térmicas superpuestas utilizando algoritmos como SIFT (Transformación de Características Invariantes a la Escala) o AKAZE (KAZE Acelerado). Las imágenes térmicas tienen menos características y menos distintivas que las imágenes RGB, por lo que la mayor superposición (70–80%) es esencial para garantizar suficientes correspondencias de características.
Ajuste de haces: Las posiciones y orientaciones relativas de la cámara se resuelven utilizando puntos de características coincidentes en el conjunto de imágenes, restringidas por las posiciones de cámara GPS RTK. El ajuste de haces produce una nube de puntos 3D dispersa de puntos de enlace y refina la calibración de la cámara (distancia focal, punto principal, parámetros de distorsión de lente).
Emparejamiento denso y generación de malla: Se genera una nube de puntos densa para la superficie del suelo, y se calcula una malla triangulada o un modelo digital de elevación (DEM). Para estudios de tableros de puentes, la superficie es aproximadamente plana, por lo que un DEM 2.5D es típicamente suficiente.
Ortorrectificación: Cada imagen térmica se ortorrectifica utilizando el DEM y los parámetros de la cámara, luego se combina en un mosaico continuo mediante optimización de líneas de unión y balance de color/térmico (ajustando las diferencias de brillo y temperatura entre imágenes). El resultado es un ortomosaico térmico georreferenciado en formato GeoTIFF con valores de temperatura incrustados.
El ortomosaico térmico final típicamente logra un GSD de 2–5 cm y una precisión posicional absoluta de 5–10 cm relativa a la verdad terreno RTK. Los tamaños de archivo para un tablero de puente de 500 m × 20 m con GSD de 3 cm están en el rango de 500–1500 MB para datos de temperatura de 32 bits de una sola banda, requiriendo hardware de procesamiento sustancial y teselado optimizado para entrega web.
Detección de Anomalías Térmicas Basada en IA
La inteligencia artificial y el aprendizaje profundo han transformado la detección de anomalías térmicas de un análisis experto subjetivo y dependiente de la experiencia a un proceso automatizado, cuantitativo y reproducible. El enfoque fundamental trata la detección de anomalías térmicas como una tarea de segmentación de imágenes — asignando a cada píxel en el ortomosaico térmico una probabilidad de pertenecer a la clase “defecto” frente a la clase “sano”.
La arquitectura U-Net ha sido el modelo de aprendizaje profundo más ampliamente validado para la segmentación de imágenes térmicas en aplicaciones de infraestructura civil. La estructura codificador-decodificador de U-Net con conexiones de salto preserva tanto las características semánticas de alto nivel (tipo de defecto, forma) como los detalles espaciales de grano fino (bordes de defectos, límites). Estudios de investigación reportan una precisión de segmentación U-Net del 84.7% (coeficiente Dice) para la detección de delaminaciones en tableros de puentes a partir de datos térmicos montados en vehículos, con una precisión del 82% y una sensibilidad del 87%. El U-Net fue entrenado con más de 15,000 parches de imágenes térmicas etiquetadas (128×128 píxeles) extraídas de estudios diurnos y nocturnos en 12 tableros de puentes en Florida y Virginia.
Los modelos basados en Transformers — específicamente el marco de detección de objetos de conjunto abierto Grounding DINO — han alcanzado un 70% de Precisión Promedio Media (mAP@[0.5:0.95]) en datos térmicos de tableros de puentes del marco IRT integrado con IA de la Universidad de Florida Central (NDT-CE 2025). El modelo logró una relación de detección del 78% frente a datos de referencia IR procesados con un promedio de Intersección sobre Unión (IoU) de 0.89, indicando una alineación estrecha entre los límites de defectos previstos y la verdad terreno. El modelo fue entrenado con más de 23,000 imágenes térmicas sin procesar (no preprocesadas) con anotaciones de defectos etiquetadas por expertos mapeadas a posiciones físicas en la superficie del tablero.
Los enfoques de aprendizaje automático clásico siguen siendo relevantes para escenarios con datos de entrenamiento limitados. Las técnicas de extracción de características calculan parámetros de textura térmica dentro de ventanas deslizantes — temperatura media, desviación estándar, asimetría (sesgo de la distribución de temperatura), curtosis (agudeza del pico), entropía (aleatoriedad de temperatura) y contraste (rango de variación de temperatura local) — y alimentan estos vectores de características a clasificadores como Random Forest (precisión reportada del 79%) o Máquinas de Vectores de Soporte (SVM, precisión reportada del 76%). Los métodos de conjuntos de nivel basados en evolución de contornos activos han logrado tasas de identificación positiva correcta (CPR) del 80.2% con tasas de falsos positivos (FPR) del 11.5%.
Reducción Automatizada de Falsos Positivos
Los falsos positivos en datos de drone IRT surgen de características superficiales que producen anomalías térmicas indistinguibles de defectos genuinos en una sola imagen térmica. Las fuentes comunes de falsos positivos incluyen: manchas de aceite (baja emisividad → parece caliente), parches de humedad (enfriamiento evaporativo → parece frío), cambios de textura superficial (ranuras de afinado, acabado de escoba → variaciones menores de temperatura), escombros (hojas, grava → firma térmica variable), marcas pintadas (diferente emisividad → desplazamiento de temperatura aparente) y sombras de barandillas de puentes o elementos de la superestructura (zonas frías). Los modelos de IA reducen los falsos positivos mediante fusión multiespectral — analizando simultáneamente la imagen RGB registrada para marcar características superficiales y excluirlas de la clasificación de defectos. El modelo Grounding DINO de la UCF integra el contexto RGB como un canal de entrada adicional, reduciendo las tasas de falsos positivos en un 35% en comparación con la detección solo térmica. El análisis multitemporal (comparando estudios térmicos diurnos y nocturnos de la misma área) reduce aún más los falsos positivos, ya que los defectos genuinos muestran firmas térmicas consistentes mientras que los artefactos ambientales cambian.
Detección de Delaminaciones en Tableros de Puentes desde Drones
Principios Físicos de la Detección de Delaminaciones
La delaminación en tableros de puentes de hormigón es una separación horizontal dentro de la losa, que ocurre típicamente en o cerca del plano del acero de refuerzo superior — aproximadamente 50–100 mm por debajo de la superficie del tablero en un tablero de puente de hormigón típico de 200–250 mm de espesor. La corrosión de la malla superior del acero de refuerzo produce productos de corrosión expansivos (óxidos e hidróxidos de hierro — herrumbre) que generan tensiones de tracción que exceden la resistencia a la tracción del hormigón (típicamente 3–5 MPa para hormigón de peso normal). La grieta horizontal resultante se propaga a lo largo del plano de las barras de refuerzo, creando un espacio lleno de aire que típicamente varía de 0.1 mm a 5 mm de espesor. Este espacio de aire actúa como un aislante térmico — la conductividad térmica del aire (0.026 W/m·K) es aproximadamente 50–80 veces menor que la del hormigón (1.7–2.5 W/m·K). Incluso un espacio de aire de 0.5 mm proporciona una resistencia térmica equivalente a aproximadamente 25–40 mm de hormigón sólido.
Durante el calentamiento solar del tablero del puente, el calor fluye hacia la superficie de hormigón y conduce hacia abajo. Donde existe una delaminación, el calor encuentra una barrera aislante que impide una mayor conducción hacia abajo. El hormigón sobre la delaminación continúa absorbiendo energía solar pero no puede disiparla hacia el tablero inferior, provocando que su temperatura aumente por encima de la del hormigón sano circundante. La diferencia de temperatura (ΔT) en la superficie sobre una delaminación sigue la ecuación de conducción de calor transitoria:
∂T/∂t = α (∂²T/∂x² + ∂²T/∂y² + ∂²T/∂z²)
Donde T es la temperatura, t es el tiempo, α es la difusividad térmica (α = k/ρcp, aproximadamente 0.7 × 10⁻⁶ m²/s para hormigón, 0.07 × 10⁻⁶ m²/s para asfalto). La solución de esta ecuación con una condición de contorno de delaminación demuestra que el ΔT superficial depende inversamente de la profundidad del defecto — un defecto a 25 mm de profundidad produce aproximadamente 4× el ΔT superficial de un defecto a 100 mm de profundidad bajo carga solar idéntica.
Limitaciones de Profundidad y Efectos de las Capas de Rodadura
La profundidad máxima a la que una delaminación puede ser detectada de forma fiable por drone IRT pasivo es de aproximadamente 100–150 mm desde la superficie bajo condiciones óptimas de carga solar (>600 W/m², cielo despejado, superficie seca, viento bajo). Más allá de esta profundidad, la onda de difusión térmica desde la superficie se atenúa hasta tal punto que la perturbación causada por la delaminación produce un ΔT superficial por debajo del umbral de detección de 0.5 °C. Esto significa que para un tablero de puente de hormigón estándar de 200–250 mm, las delaminaciones a toda la profundidad del tablero (cerca de la malla inferior) generalmente no son detectables desde la superficie mediante termografía pasiva.
Para tableros de puentes con capas de rodadura asfáltica, el desafío de detección aumenta significativamente. Una capa de rodadura asfáltica de 50 mm (2 pulgadas) de espesor reduce el ΔT superficial de una delaminación de hormigón en aproximadamente un 50–60% en comparación con un tablero desnudo. Esta atenuación ocurre porque la capa de rodadura añade masa térmica (absorbe calor), extiende la anomalía térmica lateralmente (difusión térmica dentro de la capa de rodadura) e introduce una interfaz adicional (unión capa de rodadura-tablero) que puede tener su propia firma térmica. La norma ASTM D4788 especifica que el método puede usarse en capas de rodadura de hasta 100 mm (4 pulgadas) de espesor, pero el Consejo de Investigación de Transporte de Virginia encontró que la fiabilidad de detección disminuye significativamente más allá de capas de rodadura de 75 mm. Para capas de rodadura que exceden los 100 mm, el IRT debe considerarse solo como una herramienta de cribado que requiere verificación extensiva mediante arrastre de cadenas, eco de impacto o testigos.
Estrategia de Vuelo con Dron para Estudios de Tableros de Puentes
Un estudio típico de drone IRT de tableros de puentes sigue este protocolo operativo:
Evaluación previa al vuelo: Se verifican las condiciones meteorológicas (viento <15 mph, nubosidad <10%, sin precipitaciones previstas dentro de ±2 horas de la ventana de estudio planificada). Se confirma que la superficie está seca (sin agua estancada de lluvia o sistemas de aspersión). La irradiancia solar se mide con un piranómetro en el sitio — o se coteja con datos de estaciones meteorológicas locales — para confirmar >600 W/m².
Planificación de la misión de vuelo: El tablero del puente se mapea en el software de planificación de vuelos (Pix4Dcapture, UgCS, DJI Pilot 2). Se configuran los parámetros de vuelo: altitud 30–50 m AGL, velocidad 3–5 m/s, 80% de superposición frontal, 70% de superposición lateral, intervalo de disparo de la cámara 1–2 segundos. La trayectoria de vuelo se diseña como pasadas paralelas alineadas con el eje longitudinal del puente, comenzando 10 m antes del acceso al puente y terminando 10 m más allá del estribo opuesto para garantizar una cobertura completa. Se pueden programar pasadas adicionales en ángulos oblicuos para la inspección del intradós del tablero.
Calibración térmica: Se coloca un objetivo de temperatura de referencia (cuerpo negro calibrado a temperatura ambiente) en el tablero dentro del área de estudio para validación radiométrica en campo. Algunos protocolos recomiendan colocar varios paneles de referencia con temperatura conocida en diferentes ubicaciones del tablero para capturar gradientes térmicos espaciales.
Ejecución del estudio: El dron ejecuta la misión de vuelo autónoma mientras el operador monitorea la telemetría (nivel de batería, intensidad de señal, estado de la cámara, precisión GPS). El video térmico en tiempo real se transmite al operador a través de enlace descendente a la tableta, permitiendo la identificación inmediata de anomalías térmicas significativas para notas de campo preliminares.
Validación posterior al vuelo: Inmediatamente después del aterrizaje, se utiliza un termómetro radiométrico portátil o una cámara térmica para verificar las temperaturas superficiales en varias ubicaciones de verdad terreno (delaminaciones obvias, hormigón sano, juntas de expansión conocidas) para confirmar que los datos térmicos aéreos se alinean con las mediciones superficiales.
Los estudios que comparan la detección de delaminaciones con drone IRT frente a la verdad terreno de arrastre de cadenas (en tableros de hormigón donde el arrastre de cadenas es efectivo) reportan probabilidades de detección del 75–90% para defectos >300 mm de diámetro a profundidades <75 mm, disminuyendo al 40–60% para defectos <200 mm o >100 mm de profundidad. Las tasas de falsos positivos varían del 10–25% dependiendo del estado de la superficie y los factores ambientales.
Detección de Despegue de Pavimentos y Humedad
Despegue de Pavimentos Asfálticos
El despegue en pavimentos asfálticos — la pérdida de adherencia entre capas de pavimento (típicamente entre una capa de rodadura de mezcla asfáltica en caliente y la base asfáltica o de hormigón subyacente) — crea un plano de separación horizontal que puede ser detectado por drone IRT utilizando el mismo mecanismo de aislamiento térmico que la delaminación de hormigón. Cuando una capa de rodadura se despega: el espacio de aire impide que el calor conduzca hacia abajo durante el calentamiento solar, produciendo un punto caliente superficial; durante el enfriamiento nocturno, el espacio impide que el calor almacenado ascienda, produciendo una anomalía cálida. Sin embargo, el despegue asfáltico presenta firmas térmicas únicas en comparación con la delaminación de hormigón debido a la mayor absortividad solar del asfalto (0.90–0.95 para asfalto envejecido frente a 0.60–0.75 para hormigón), menor conductividad térmica (0.7–1.0 W/m·K frente a 1.7–2.5 W/m·K) y menor masa térmica.
La Universidad de Nebraska-Lincoln y el Departamento de Transporte de Nebraska realizaron estudios exhaustivos (Informe M082, ROSAP DOT 61030) evaluando el IRT montado en drones para detectar vacíos subsuperficiales y despegue entre capas en pavimentos de carreteras. Los resultados demostraron una detección fiable del despegue a profundidades de hasta 75–100 mm en condiciones térmicas óptimas (tarde soleada de verano, irradiancia solar >700 W/m², superficie de pavimento seca). El estudio encontró que las secciones de capa de rodadura asfáltica despegadas presentaban elevaciones de temperatura superficial de 1.5–4.0 °C en relación con las secciones sanas adyacentes — significativamente mayor que el ΔT de la delaminación de hormigón debido a la mayor absortividad solar del asfalto.
Detección de Humedad en Pavimentos
La acumulación de humedad en pavimentos — agua atrapada dentro de la estructura del pavimento, en las interfaces de las capas, o debajo de la capa de pavimento — produce una firma térmica distinta de los vacíos llenos de aire o las delaminaciones. El agua tiene una conductividad térmica de 0.6 W/m·K (aproximadamente 23× mayor que el aire pero 3–4× menor que el hormigón) y una capacidad calorífica volumétrica de 4.18 MJ/m³·K (aproximadamente 2× la del hormigón y 3,000× la del aire). Estas propiedades significan que:
Durante el calentamiento solar: Un vacío lleno de humedad conduce el calor de manera más eficiente que un vacío lleno de aire, por lo que la superficie sobre un área húmeda se calienta más lentamente que sobre una delaminación seca — la superficie puede aparecer más fría que el pavimento circundante durante la fase de calentamiento (contraste térmico negativo). El agua absorbe energía térmica sin un aumento proporcional de temperatura debido a su alta capacidad calorífica específica (4,180 J/kg·K).
Durante el enfriamiento nocturno: El agua retiene el calor almacenado y lo libera más lentamente que los materiales secos circundantes, provocando que el área húmeda aparezca más cálida durante la fase de enfriamiento (contraste nocturno positivo). Esta firma nocturna es a menudo más fiable para la detección de humedad que los estudios diurnos.
Enfriamiento evaporativo: Si la humedad está cerca de la superficie y el agua puede evaporarse, el enfriamiento evaporativo puede producir un punto frío de 2–5 °C por debajo de la temperatura ambiente independientemente del ciclo de calentamiento diurno — la firma térmica más definitiva de humedad cercana a la superficie.
La detección de humedad con drone IRT es más efectiva cuando se combina con datos GPR que confirman la presencia y profundidad del agua. El estudio del DOT de Nebraska encontró que los estudios combinados IRT + GPR con drones lograron una precisión del 88% para la detección de humedad en capas de subbase de pavimentos a profundidades de hasta 150 mm, en comparación con una precisión del 62% para IRT solo.
Desprendimiento en Mezclas Asfálticas
El desprendimiento — la pérdida de adherencia entre el ligante asfáltico y el árido en mezcla asfáltica en caliente debido al daño por humedad — crea despegue a microescala que puede no producir anomalías térmicas detectables individualmente. Sin embargo, cuando el desprendimiento afecta un volumen sustancial de la mezcla (típicamente >25% del área del pavimento a una profundidad dada), el pavimento afectado exhibe propiedades térmicas alteradas — menor conductividad térmica (debido a los vacíos de aire creados por la separación ligante-árido) y mayor retención de humedad. El drone IRT puede detectar estas zonas térmicamente alteradas como áreas de respuesta térmica retardada — se calientan más rápido durante el día (debido a los vacíos de aire) pero pueden mostrar un calentamiento diurno menos pronunciado si también hay humedad presente. La detección del desprendimiento requiere un análisis multitemporal cuidadoso comparando las tasas de calentamiento y enfriamiento de áreas sospechosas contra pavimento sano conocido, ya que la firma térmica es sutil (ΔT típicamente 0.5–1.0 °C) y fácilmente enmascarada por variaciones de emisividad superficial.
Integración con Inspección Visual RGB
Datos Térmicos y Visuales Co-Registrados
Los payloads modernos de drone IRT capturan imágenes térmicas y RGB co-registradas — lo que significa que cada imagen térmica tiene una imagen RGB (espectro visible) correspondiente capturada desde la misma posición de cámara y dirección de apuntamiento, con una transformación geométrica conocida entre los dos sensores. El DJI Zenmuse H20T logra esto montando el sensor térmico, el sensor RGB gran angular y el sensor RGB telefoto en un banco óptico común dentro del alojamiento con cardán, calibrado en fábrica para que los píxeles de cada sensor se asignen a coordenadas terrestres conocidas. Este co-registro permite:
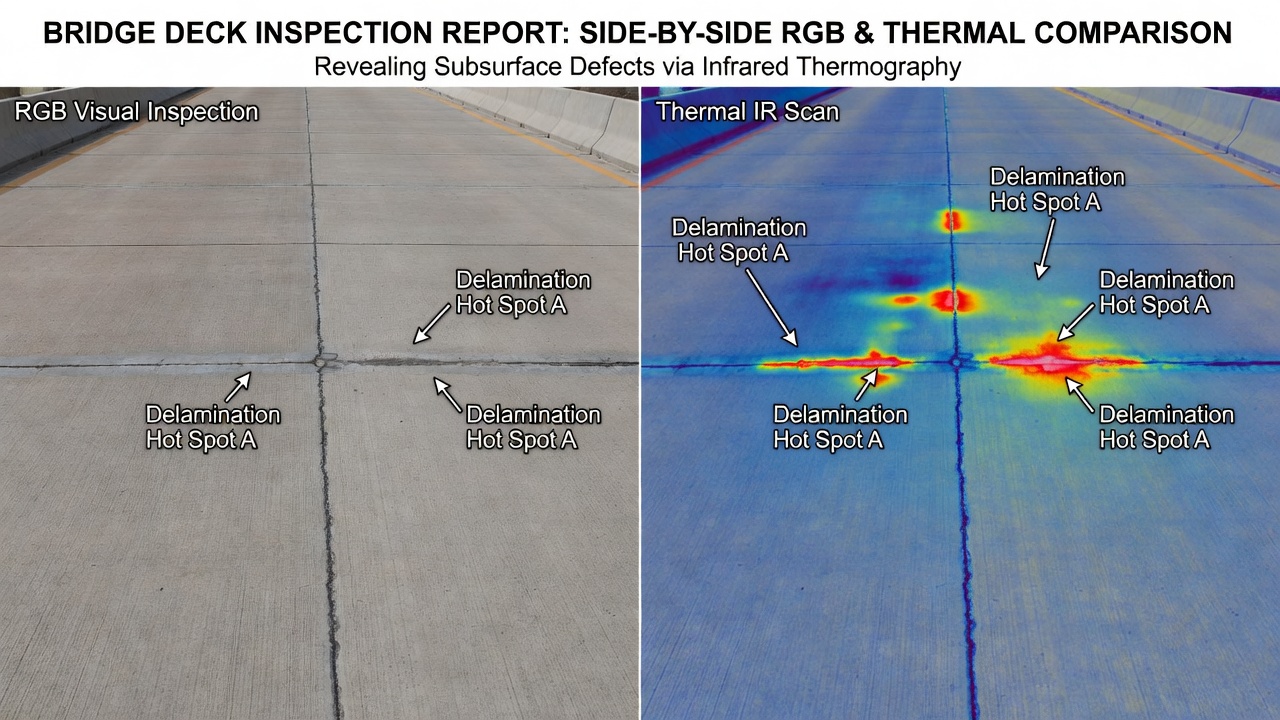
Visualización en pantalla dividida: El operador o analista puede ver la imagen térmica y la imagen RGB correspondiente lado a lado, utilizando el contexto visible para interpretar las anomalías térmicas — ¿ese punto caliente es una delaminación o una mancha de aceite? La imagen RGB revela características superficiales invisibles en la imagen térmica.
Fusión de imágenes: Los datos térmicos (en falso color) se superponen semitransparentemente sobre la imagen RGB utilizando mezcla alfa, creando una sola imagen combinada donde el contexto visual es visible debajo de la superposición de anomalías térmicas. Este producto es significativamente más interpretable para los ingenieros de puentes y los lectores de informes de inspección que los termogramas sin procesar.
Análisis multiespectral: El modelo de detección de IA recibe tanto canales térmicos como RGB como entrada, aprendiendo a asociar patrones de anomalías térmicas con características superficiales visibles. Esta entrada multiespectral reduce las tasas de falsos positivos al permitir que el modelo reconozca que un punto caliente circular con manchas oscuras en el canal RGB es probablemente una mancha de aceite, mientras que un punto caliente sin características superficiales visibles es probablemente una delaminación subsuperficial.
Mapeo Comparativo de Defectos
La integración de datos de drone IRT con datos de inspección visual RGB permite el mapeo comparativo de defectos — superponiendo polígonos de anomalías térmicas en el mapa de defectos de inspección visual para identificar relaciones entre defectos visibles en la superficie (grietas, desconchados, parches) y defectos subsuperficiales (delaminaciones, despegues). El estudio de WisDOT/AECOM 2024 demostró que la comparación de mapas de anomalías térmicas de drone IRT con mapas de grietas RGB concurrentes reveló que el 68% de las anomalías térmicas correspondían a áreas con agrietamiento visible en la superficie, mientras que el 32% representaban delaminaciones sin expresión superficial — el tipo más peligroso porque no pueden detectarse solo mediante inspección visual. Por el contrario, el 23% de las áreas con agrietamiento superficial no mostraron anomalía térmica, indicando deterioro solo superficial sin delaminación subsuperficial — áreas que pueden no requerir reparación estructural.
Integración con TarmacView
La plataforma de inspección visual de TarmacView puede ingerir ortomosaicos térmicos de drone IRT como capas de datos adicionales dentro de la base de datos de inspección de puentes. Los polígonos de anomalías térmicas — generados por el análisis de IA del mosaico térmico y exportados en formato GeoJSON o shapefile — se importan como capas de defectos superpuestas. Cada anomalía térmica lleva atributos: ΔT (diferencia de temperatura en °C), área (m²), coordenadas del centroide (latitud, longitud en NAD83 o WGS84), confianza de detección (de la salida del modelo de IA), clasificación de gravedad (basada en umbrales de ΔT) y el nombre del archivo de imagen térmica de origen para trazabilidad. La interfaz de TarmacView permite a los inspectores:
Consultar anomalías térmicas: Hacer clic en cualquier polígono de anomalía térmica para ver su diferencia de temperatura, el recorte de imagen térmica sin procesar, la imagen RGB correspondiente y cualquier dato de inspección visual (mapas de grietas, áreas de desconchado, registros de parches) en esa ubicación.
Comparación temporal: Superponer estudios térmicos de diferentes años para rastrear la propagación de delaminaciones — una delaminación que creció de 0.3 m² a 1.2 m² entre los estudios de 2024 y 2025 indica claramente un deterioro activo que requiere intervención.
Correlación multimétodo: Comparar anomalías térmicas de drone IRT con datos de verdad terreno de tomografía ultrasónica, martilleo o testigos que se recolectaron en las ubicaciones marcadas, construyendo una base de datos de calibración que mejora la precisión del modelo de detección futuro.
Drone IRT vs IRT Vehicular
Comparación de Velocidad de Cobertura
El IRT montado en vehículo (según ASTM D4788) y el IRT montado en dron difieren fundamentalmente en la velocidad de estudio y la tasa de cobertura de área. Los sistemas vehiculares están diseñados para tráfico de alta velocidad — capturando imágenes térmicas a velocidades de circulación de 50–70 mph (80–113 km/h) con un ancho de barrido de aproximadamente 4.6 m (15 pies) por pasada. Un tablero de puente estándar de 2 carriles (30 m de largo × 12 m de ancho = 360 m²) puede cubrirse en una sola pasada de 30 segundos a 60 mph, con dos pasadas adicionales para el carril opuesto y los arcenes añadiendo quizás 3 minutos de tiempo total de estudio del tablero. Incluyendo la configuración, aproximación/salida y una pasada de enfriamiento adicional, el estudio completo del tablero toma 5–10 minutos — completado sin ninguna interrupción del tráfico ya que el vehículo de estudio se mueve con el flujo de tráfico normal.
El drone IRT cubre el mismo tablero de puente a una velocidad significativamente más lenta. A una altitud de estudio de 40 m (proporcionando ~3.5 cm de GSD), el ancho de barrido de la imagen térmica es de aproximadamente 16 m. Con un 70% de superposición lateral, el ancho de barrido efectivo por línea de vuelo es de 4.8 m. Para el mismo tablero de 12 m de ancho, se necesitan 3 líneas de vuelo. A una velocidad de vuelo de 5 m/s sobre 35 m por pasada (incluyendo búfer), cada pasada toma 7 segundos. Tres pasadas más giros, estabilización de altitud y comprobaciones del sistema equivalen a aproximadamente 3–5 minutos para la recolección de datos del tablero — comparable a la velocidad del vehículo para esta área pequeña. Sin embargo, el dron debe desplegarse, verificar las baterías, completar las comprobaciones previas al vuelo y establecer el punto de lanzamiento antes del estudio. Para estudios de pavimentos de grandes áreas (por ejemplo, 1 km × 8 m de pista), la comparación cambia drásticamente: el IRT vehicular cubre 1 km en 30–40 segundos a 60 mph; el drone IRT a 5 m/s con 4.8 m de barrido efectivo requiere 11 líneas de vuelo de 200 segundos cada una = 2,200 segundos = 37 minutos de tiempo de vuelo, requiriendo 2–3 cambios de batería.
Métrica
Drone IRT
IRT Vehicular
Velocidad de estudio
3–8 m/s (10–28 km/h)
22–31 m/s (80–113 km/h)
Ancho de barrido
12–20 m (depende de altitud)
4.6 m (fijo)
Tasa de cobertura
~475 m²/hora
~18,000 m²/hora
Tiempo típico de estudio de tablero
15–30 min (incluyendo configuración)
5–10 min (desde la aproximación)
Área cubrible por turno
~15,000 m²
~50,000 m²
Interrupción del tráfico
Ninguna
Ninguna
Necesidad de acceso al puente desde abajo
No
No
Ventaja de Acceso del Drone IRT
La principal ventaja del drone IRT sobre el IRT vehicular es el acceso a elementos del puente más allá de la superficie del tablero. Los drones pueden inspeccionar:
Intradós de tableros: La parte inferior de los tableros de puentes — crítica para detectar desconchados y delaminaciones que pueden no ser aún visibles desde la superficie superior. Los drones vuelan debajo del puente, utilizando ángulos de cámara hacia arriba u oblicuos para capturar datos térmicos del intradós. El desafío térmico: el intradós del tablero no recibe radiación solar directa, por lo que el contraste térmico pasivo debe provenir de la conducción del calor a través del espesor del tablero — requiriendo estudios diurnos cuando la superficie superior está calentada y el gradiente de calor se propaga a través del tablero. Puede ser necesaria termografía activa con iluminación suplementaria para intradós sombreados.
Elementos verticales: Las columnas de pilas de puentes, cabezales de pilas, muros de estribos, muros de fuste, muros de ala y muros de contención pueden inspeccionarse con el dron volando junto al elemento a una distancia de separación de 5–15 m. La cámara térmica se apunta horizontalmente (o ligeramente inclinada hacia abajo) para capturar la superficie vertical. La carga solar en superficies verticales es menos intensa que en tableros horizontales (coseno del ángulo entre el sol y la normal a la superficie), por lo que la termografía de elementos verticales requiere estudios al mediodía cuando el ángulo del sol es más alto.
Espacios restringidos: El drone IRT puede inspeccionar áreas bajo puentes, interiores de alcantarillas, revestimientos de túneles y elementos estructurales confinados donde los sistemas montados en vehículos no pueden llegar y donde la inspección tripulada requeriría andamios, vehículos de inspección bajo puentes (camiones snooper) o acceso por cuerdas.
Puentes sobre obstáculos: Los drones pueden inspeccionar puentes sobre agua, valles profundos, humedales ambientalmente sensibles, vías férreas activas o cañones urbanos donde el acceso vehicular para el escaneo del tablero es imposible. El dron opera desde un punto de lanzamiento seguro fuera del área del obstáculo y vuela la misión de inspección completa de forma autónoma.
Comparación de Costos
El estudio de la Universidad de Nebraska-Lincoln y el DOT de Nebraska proporcionó comparaciones detalladas de costos para métodos de identificación de defectos relacionados con la calidad (QRDI). El drone IRT logró un costo de aproximadamente $0.06 por pie cuadrado ($0.65/m²), en comparación con $0.15–$0.30 por pie cuadrado para IRT vehicular incluyendo movilización y procesamiento de datos. El arrastre de cadenas — el método de referencia — cuesta $0.60–$1.00 por pie cuadrado ($6.50–$10.75/m²) pero requiere cierres de carriles y múltiples inspectores. La ventaja de costo del drone IRT se vuelve más significativa para puentes en ubicaciones remotas o sobre obstáculos donde el acceso vehicular requeriría una extensa preparación del sitio. Sin embargo, el IRT vehicular mantiene una ventaja de costo por área para tableros de puentes grandes y fácilmente accesibles donde la recolección de datos a alta velocidad es factible. La estrategia óptima desde una perspectiva de costos: IRT vehicular para el cribado rápido a nivel de tablero de puentes accesibles, drone IRT para puentes con desafíos de acceso, elementos verticales, intradós y seguimiento específico de anomalías identificadas en el estudio vehicular.
Consideraciones Regulatorias
Parte 107 de la FAA para Termografía con Drones
En los Estados Unidos, las operaciones comerciales de drone IRT se rigen por la Parte 107 de la FAA (Código de Regulaciones Federales Título 14, Capítulo I, Subcapítulo F, Parte 107) — Sistemas de Aeronaves Pequeñas No Tripuladas. Los requisitos clave aplicables a las operaciones de termografía:
Certificado de Piloto Remoto: El operador del dron debe poseer un Certificado de Piloto Remoto emitido por la FAA, obtenido mediante la aprobación del Examen de Conocimientos Aeronáuticos (examen inicial de la Parte 107) y completando un examen de conocimientos recurrente cada 24 meses. El certificado requiere una edad mínima de 16 años y una verificación de seguridad de la TSA.
Registro de la Aeronave: El dron debe estar registrado en la FAA si pesa más de 0.55 lb (250 g). Todos los drones utilizados para termografía de puentes superan este umbral. El registro cuesta $5 y es válido por 3 años. El número de registro debe mostrarse en la aeronave.
Requisito VLOS: El dron debe operarse dentro de la línea de visión visual (VLOS) del piloto remoto o un observador visual — lo que significa que la aeronave debe ser visible sin binoculares en todo momento. Para estudios de tableros de puentes, esto restringe el rango continuo de inspección a aproximadamente 400–500 m desde la estación del piloto. Los tableros de puentes grandes (por ejemplo, el puente de la Bahía de Chesapeake de 1,200 m de largo) requieren reposicionar la estación del piloto a lo largo del tablero o utilizar múltiples observadores visuales.
Altitud Máxima: 400 ft (120 m) AGL, a menos que el dron esté dentro de los 400 ft de una estructura, en cuyo caso la altitud puede exceder los 400 ft AGL hasta en 400 ft por encima de la parte superior de la estructura. Esto es suficiente para estudios de tableros de puentes (típicamente 30–60 m AGL) pero puede restringir la inspección de la parte superior de torres de puentes muy altas.
Operaciones Diurnas: La Parte 107 históricamente restringía las operaciones a horas diurnas (30 minutos antes del amanecer oficial hasta 30 minutos después del atardecer oficial). La regla de operaciones nocturnas de la Parte 107 de 2021 permite vuelos nocturnos sin exención, siempre que el dron tenga iluminación anticolisión visible por 3 millas náuticas y el piloto remoto haya completado la capacitación recurrente actualizada que cubre operaciones nocturnas. Esto es significativo para la termografía porque los estudios nocturnos a menudo proporcionan un contraste térmico superior para ciertos tipos de defectos.
Operación Sobre Personas: La Parte 107 generalmente prohíbe el vuelo sobre personas que no participan directamente en la operación, a menos que el dron cumpla requisitos específicos de peso y seguridad (Categoría 1–4). Para la termografía de puentes sobre carreteras activas con tráfico debajo, el dron no vuela sobre vehículos (la superficie del tablero está por encima del dron a altitudes de estudio típicas), pero las operaciones sobre áreas pobladas cerca de los accesos al puente pueden requerir el cumplimiento de las disposiciones sobre vuelo sobre personas.
BVLOS y Autorizaciones Especiales
Las operaciones Más Allá de la Línea de Visión Visual (BVLOS) — donde el dron vuela más allá del rango visual sin ayuda del piloto remoto — son relevantes para la inspección con drone IRT de tramos largos de pavimento (tramos de carretera, pistas de aterrizaje) o tableros de puentes grandes donde la cobertura VLOS continua es impracticable. Las exenciones BVLOS de la FAA (Parte 107.31) requieren un caso de seguridad detallado que demuestre una seguridad equivalente o mayor que las operaciones VLOS. El caso de seguridad debe abordar la capacidad de detectar y evitar (radar, ADS-B o sensores electro-ópticos que detecten otras aeronaves), enlace C2 fiable (con especificaciones de latencia y redundancia), procedimientos de enlace perdido (comportamiento a prueba de fallos: retorno al hogar, vuelo estacionario o continuación de la misión) y monitoreo del espacio aéreo. A partir de 2025, la FAA ha otorgado exenciones BVLOS a varios operadores de inspección con drones para la inspección de infraestructura, pero el proceso de exención sigue siendo caso por caso y puede requerir 60–120 días para su aprobación.
Para operaciones de drone IRT cerca de aeropuertos o en espacio aéreo controlado (áreas superficiales Clase B, C, D o E), los operadores deben obtener autorización de espacio aéreo a través del sistema LAANC (Capacidad de Autorización y Notificación de Baja Altitud) de la FAA. LAANC proporciona autorización casi en tiempo real para operaciones de la Parte 107 en espacio aéreo controlado hasta 400 ft AGL. La mayoría de los tableros de puentes en áreas urbanas se encuentran dentro del espacio aéreo controlado, y la autorización LAANC se puede obtener típicamente en minutos para operaciones estándar durante horas diurnas. Las operaciones nocturnas en espacio aéreo controlado requieren coordinación manual con la instalación de control de tráfico aéreo.
Marcos Regulatorios Internacionales
La Organización de Aviación Civil Internacional (OACI) proporciona el marco regulatorio general a través de la Circular 328 de la OACI (Sistemas de Aeronaves No Tripuladas, 2011) y el Reglamento Modelo de UAS de la OACI (2020). La Circular 328 estableció los principios fundamentales de la regulación de UAS — incluido el concepto de que los UAS deben operarse con un nivel de seguridad equivalente al de las aeronaves tripuladas. El Reglamento Modelo de UAS proporciona un marco para que los reguladores nacionales lo adopten, cubriendo el registro de aeronaves, la certificación de operadores, las limitaciones operativas y la integración del espacio aéreo. El Anexo 6 de la OACI, Parte IV (2022) proporciona Estándares y Prácticas Recomendadas (SARPs) para operaciones internacionales de RPAS.
La Agencia de Seguridad Aérea de la Unión Europea (EASA) Reglamento 2019/947 clasifica las operaciones de UAS en tres categorías según el riesgo: Abierta (bajo riesgo, <25 kg, VLOS, <400 ft, sin autorización necesaria pero sujeta a limitaciones operativas), Específica (riesgo aumentado, que requiere autorización operativa de la autoridad de aviación nacional basada en una evaluación de riesgos SORA) y Certificada (equivalente a los requisitos de aeronaves tripuladas, para operaciones sobre concentraciones de personas, transporte de personas o mercancías peligrosas). El drone IRT para inspección de infraestructura típicamente cae bajo la categoría Específica, requiriendo que el operador presente un SORA (Evaluación de Riesgos de Operaciones Específicas) u obtenga una declaración de evaluación de riesgos predefinida (PDRA). EASA ha publicado escenarios estándar (STS-01 y STS-02 para operaciones VLOS bajo categoría Específica) que simplifican el proceso de autorización.
Región
Regulación
Requisitos Clave para Drone IRT
Estados Unidos
FAA Parte 107
Certificado de Piloto Remoto, registro, VLOS, 400 ft AGL, operaciones nocturnas (con luces)
Unión Europea
EASA 2019/947
Autorización de categoría Específica, evaluación de riesgos SORA, certificado de operador
Reino Unido
CAA CAP 722
Autorización operativa, registro de operador UAS, competencia del piloto
Canadá
Transport Canada CAR 901
Certificado de vuelo especial, VLOS, 400 ft AGL excepto con SFOC
Australia
CASA Parte 101
RePL (licencia de piloto), ReOC (certificado de operador), niveles VLOS/EVLOS/BVLOS
Japón
MLIT Ley de Aviación Civil
Registro requerido (100g+), permisos de operación para espacio aéreo específico
Operaciones de Vuelo Nocturno
Los estudios nocturnos de drone IRT son cada vez más comunes porque ofrecen contraste térmico inverso — las delaminaciones aparecen como anomalías cálidas contra el hormigón sano más frío — y evitan artefactos de sombra, deslumbramiento del tráfico y reflexiones térmicas de estructuras adyacentes. Las regulaciones de la FAA para operaciones nocturnas de la Parte 107 (efectivas desde abril de 2021) requieren:
Iluminación anticolisión: El dron debe tener una luz anticolisión visible por 3 millas náuticas (4.8 km). La luz debe ser estroboscópica o intermitente y puede ser las luces de navegación integrales del dron o un estroboscopio LED añadido. Esto es principalmente para la prevención de colisiones con aeronaves tripuladas.
Capacitación recurrente: El piloto remoto debe completar una capacitación recurrente actualizada que cubra operaciones nocturnas, incluyendo factores fisiológicos (visión nocturna, desorientación espacial), requisitos de iluminación y consideraciones operativas.
Requisito VLOS: Las operaciones nocturnas siguen sujetas a VLOS — el dron debe ser visible para el piloto remoto en todo momento. Esto requiere un dron con iluminación adecuada o el uso de un observador visual con equipo de visión nocturna.
Los estudios térmicos nocturnos presentan desafíos operativos adicionales: conciencia situacional reducida (dificultad para ver obstáculos como barandillas de puentes y cables de viento), sin referencia visual para la percepción de profundidad, temperaturas más frías que reducen el rendimiento de la batería (la capacidad de la batería disminuye 10–20% en clima frío) y posible condensación en la lente de la cámara térmica. Sin embargo, la calidad de los datos térmicos es a menudo superior a los datos diurnos — el contraste térmico puede alcanzar 1.5–4.0 °C (en comparación con 1.0–3.0 °C diurno), y los artefactos de reflexión solar (destellos de parabrisas de vehículos, deslumbramiento solar en pavimento mojado) están ausentes.
Reporte de Resultados de Inspección Térmica
Especificaciones de los Entregables
Los resultados de la inspección con drone IRT se entregan como un paquete de informe de inspección integral que comprende productos de datos térmicos georreferenciados, bases de datos de anomalías detectadas, clasificaciones de gravedad y recomendaciones. Los entregables estándar incluyen:
Ortomosaico térmico (GeoTIFF): Una imagen térmica georreferenciada de un solo archivo de toda la superficie inspeccionada, con cada píxel almacenando un valor de temperatura calibrado (flotante de 32 bits, unidades de °C o K). El GeoTIFF incluye una definición de CRS (Sistema de Referencia de Coordenadas) incrustada — típicamente NAD83 (2011) para coordenadas planas estatales de EE. UU. o WGS84 para lat/lon. La resolución espacial coincide con la distancia de muestra en el suelo del estudio (típicamente 3–5 cm).
Mapa de anomalías térmicas (GeoJSON o shapefile): Polígonos que delinean cada anomalía térmica detectada, con atributos: ID de anomalía, ΔT (°C), área (m²), perímetro (m), coordenadas del centroide, confianza de detección (escala 0–1 del modelo de IA), clasificación de gravedad, fecha de inspección y referencia de datos fuente.
La clasificación de gravedad de defectos sigue el sistema FHWA/NACE ampliamente utilizado adaptado para anomalías térmicas:
Nivel de Gravedad
Rango de ΔT
Acción Requerida
Área de Ejemplo
Bajo (monitorear)
0.5–1.0 °C
Incluir en el próximo ciclo de inspección rutinaria
Delaminación pequeña y poco profunda
Moderado
1.0–3.0 °C
Programar reparación en 1–2 años
Delaminación típica, 0.5–1 m²
Alto
3.0–10.0 °C
Reparar en 6 meses
Delaminación grande, preocupación estructural
Crítico
>10.0 °C
Reparación inmediata
Desconchado activo, peligro de seguridad
Ortomosaico RGB (GeoTIFF): Imagen visual de alta resolución del área inspeccionada, georreferenciada y alineada con el mosaico térmico para visualización por superposición.
Visor web interactivo: Muchos proveedores de estudios entregan resultados a través de plataformas GIS basadas en web (ArcGIS Online, Cesium, Potree) donde los inspectores pueden alternar entre capas térmicas y RGB, acercarse a anomalías individuales, ver datos de atributos y medir distancias o áreas. El visor interactivo permite a los ingenieros de puentes consultar cualquier ubicación en el puente y recuperar la temperatura superficial en el momento del estudio.
Estándares de Documentación de Anomalías
Cada anomalía térmica detectada debe documentarse con suficiente detalle para la inspección de seguimiento, la planificación de reparaciones y el monitoreo de la condición a largo plazo. El Manual de la Asociación Estadounidense de Funcionarios de Carreteras y Transporte del Estado (AASHTO) para la Inspección de Elementos de Puentes proporciona el marco para la documentación de defectos. Para anomalías térmicas, la documentación incluye:
Ubicación: Coordenadas GPS (latitud, longitud, elevación), elemento del puente (tablero, intradós, viga, pila) y referencia específica de la estructura (línea de viga, número de vano, número de estación basado en planos del puente).
Geometría: Longitud, anchura, área y orientación (relativa al eje longitudinal del puente). Para anomalías irregulares, se registran el rectángulo envolvente mínimo y el polígono de envolvente convexa.
Datos de temperatura: Temperatura superficial máxima dentro de la anomalía, temperatura mínima, ΔT relativo al material sano adyacente (temperatura media de una zona de búfer de 1 m alrededor de la anomalía) y el gradiente de temperatura (ΔT/distancia) en el límite de la anomalía — los gradientes pronunciados indican bordes de defectos distintos.
Nivel de confianza: Basado en la salida de detección de IA y la revisión del analista: Alto (firma térmica clara, confirmada por contexto RGB, ΔT > 2 °C), Medio (firma moderada, cierta ambigüedad, ΔT 1–2 °C) o Bajo (firma sutil, posible falso positivo, ΔT 0.5–1.0 °C) — que requiere verificación mediante otro método END.
Acción recomendada: Recomendación específica para cada anomalía: monitorear, verificar mediante UT/sondeo, extraer testigo, programar reparación o reparación inmediata.
Aseguramiento de Calidad y Verificación
El informe de inspección de drone IRT debe incluir documentación de aseguramiento de calidad que demuestre la precisión y fiabilidad de los datos. El paquete de QA/QC debe incluir:
Certificados de calibración: Certificados de calibración actuales (dentro de los 12 meses) de la cámara térmica, con trazabilidad al NIST o instituto nacional de metrología equivalente. El documento de calibración establece la precisión de la cámara (típicamente ±2 °C o ±2%) y NETD (≤50 mK).
Verificación de verdad terreno: Mediciones de temperatura recolectadas en 3–5 puntos de verdad terreno en toda el área inspeccionada utilizando un termómetro de contacto calibrado (termopar tipo K o sonda de superficie) o radiómetro calibrado. La diferencia entre las temperaturas aéreas y del terreno debe documentarse; las discrepancias que excedan los 2 °C deben investigarse.
Verificación de GSD: El GSD real se verifica midiendo dimensiones conocidas en el ortomosaico térmico (espaciado de juntas de expansión, ancho de carril, dimensiones estructurales conocidas) y comparando con el GSD nominal del diseño del estudio.
Precisión posicional: La precisión del GPS RTK se verifica comparando las coordenadas medidas de 3–5 puntos de control en tierra (levantados con estación total o rover RTK) con sus coordenadas medidas a partir del ortomosaico térmico. El error cuadrático medio (RMSE) debe ser <10 cm para horizontal y <15 cm para vertical.
Validación de detección: Para puentes donde se realizan ensayos destructivos u otros END, se genera una matriz de confusión que compara las anomalías detectadas por IRT con los defectos verificados. Las métricas incluyen tasa de verdaderos positivos (sensibilidad), tasa de falsos positivos, precisión y puntuación F1. Estas métricas se reportan para el estudio general y se desglosan por nivel de gravedad y profundidad del defecto.
Integración con Sistemas de Gestión de Puentes (BMS)
El resultado final de una inspección con drone IRT no son los datos térmicos en sí mismos sino la integración de los datos de anomalías térmicas en el sistema de gestión de puentes (BMS) que impulsa la planificación de mantenimiento, la priorización de reparaciones y la asignación presupuestaria. La mayoría de los DOT estatales de EE. UU. utilizan AASHTOWare Bridge Management o plataformas BMS basadas en Pontis. Los datos de anomalías de drone IRT alimentan estos sistemas a través de:
Asignación de estado de condición: Cada elemento del puente recibe un estado de condición (escala 1–4 según el Manual de AASHTO para la Inspección de Elementos de Puentes) basado en la extensión y gravedad de los defectos detectados. Por ejemplo, un tablero de puente con <2% de área delaminada (determinada a partir del área de anomalía térmica de drone IRT dividida por el área total del tablero) recibiría Estado de Condición 1 (Bueno); 2–10% de delaminación = Estado de Condición 2 (Regular); 10–25% = Estado de Condición 3 (Pobre); >25% = Estado de Condición 4 (Severo).
Modelado de deterioro: La comparación de estudios sucesivos de drone IRT permite el desarrollo de curvas de deterioro a nivel de elemento — la tasa de crecimiento del área delaminada a lo largo del tiempo. Un tablero que muestra una propagación de delaminación del 5% al 12% en 3 años indica un deterioro acelerado que requiere intervención en 1–2 años para evitar el Estado de Condición 4.
Priorización de reparaciones: La gravedad, extensión y ubicación de la anomalía térmica se integran con otros datos de inspección de puentes (clasificación de carga, condición de socavación, estado de miembros con fractura crítica) para generar una puntuación de prioridad numérica para cada acción de reparación. Los drones permiten esta integración de datos de múltiples fuentes al proporcionar una base de datos de defectos cuantificada y georreferenciada que puede ser ingerida directamente en el BMS.
Preguntas Frecuentes
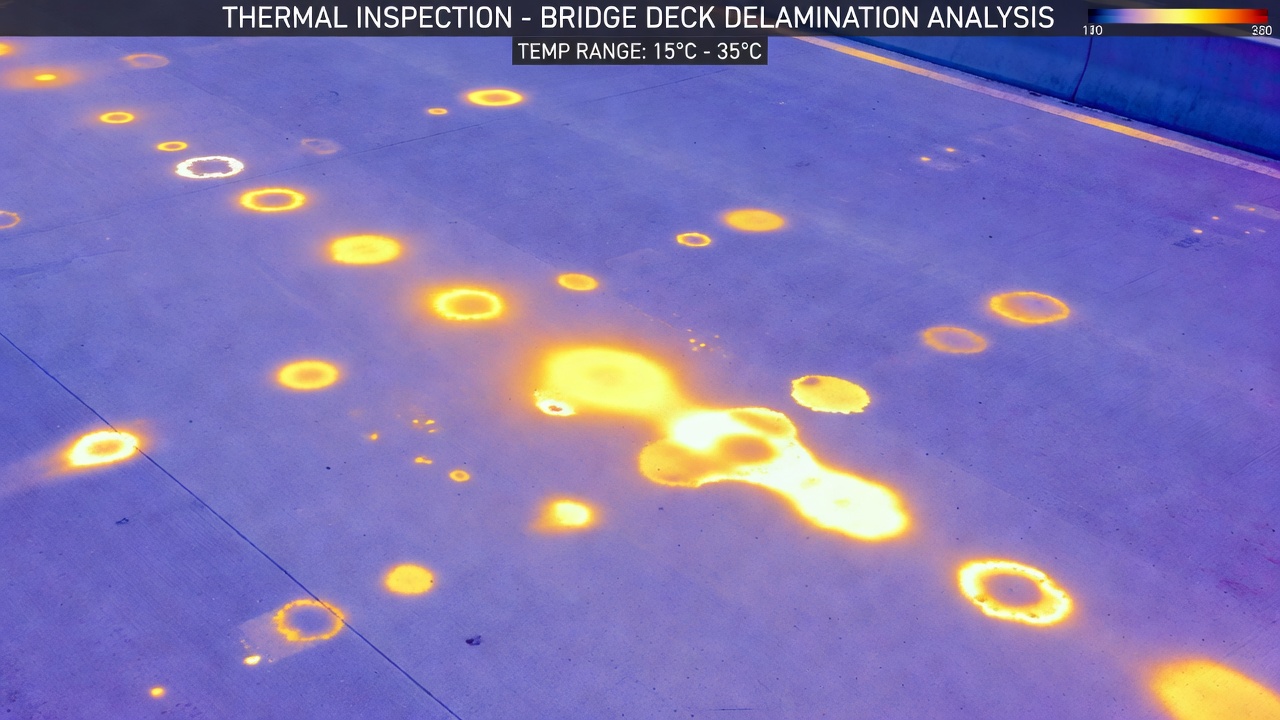
La termografía infrarroja basada en drones (drone IRT) es un método END que monta una cámara de imagen térmica en un vehículo aéreo no tripulado (UAV) para detectar defectos subsuperficiales en tableros de puentes, pavimentos y estructuras de hormigón. El dron vuela sobre la superficie objetivo mientras la cámara térmica registra las variaciones de temperatura superficial. Los defectos subsuperficiales — delaminaciones, despegues, vacíos y bolsas de humedad — tienen propiedades térmicas diferentes al material sano. Durante el calentamiento solar, los espacios llenos de aire (delaminaciones) actúan como aislante térmico, provocando que la superficie sobre el defecto se caliente más rápido y alcance 0.5–3 °C más que el hormigón sano circundante. La cámara térmica captura estas diferencias de temperatura como anomalías térmicas visibles en termogramas de falso color. El drone IRT permite la inspección de tableros de puentes, cabezales de pilas, estribos, secciones de pavimento y estructuras elevadas sin cierre de tráfico, andamios ni equipos de acceso bajo puentes.
Los payloads típicos de drone IRT utilizan cámaras LWIR de microbolómetro no refrigerado en la banda espectral de 7.5–14 µm. Los modelos comunes incluyen la DJI Zenmuse H20T (640×512 de resolución, 12 µm de paso de píxel, NETD ≤50 mK, f/1.0, precisión ±2 °C, ~$12K), FLIR Vue Pro R (640×512, 12 µm, NETD <50 mK, opciones de lente de 9 mm o 13 mm, calibración radiométrica, ~$6K–$9K) y Workswell WIRIS Pro (640×512, NETD 30 mK, zoom óptico 10×, rango de temperatura hasta 1500 °C, grabación de datos a bordo). Estas cámaras deben pesar menos de 500 g para los límites de carga útil típicos de multirrotores y deben montarse en un cardán estabilizado de 3 ejes para aislarlas de la vibración y el movimiento del dron. La integración de GPS RTK es esencial para un georreferenciado preciso de cada imagen térmica, permitiendo una localización exacta de defectos en los planos del puente.
Los estudios pasivos de drone IRT para tableros de puentes y pavimentos deben realizarse durante períodos de carga solar adecuada. La ventana óptima es de 5 a 9 horas después del amanecer (fase de calentamiento máximo, típicamente de 10:00 AM a 3:00 PM en climas templados) o de 3 a 5 horas después del atardecer (fase de enfriamiento máximo, típicamente de 8:00 PM a medianoche). La irradiancia solar debe superar los 250 W-h/m² para un contraste térmico fiable. La nubosidad, incluso la nubosidad dispersa, reduce drásticamente el contraste térmico porque reemplaza la radiación solar directa por radiación difusa del cielo. Las velocidades del viento superiores a 15 mph (24 km/h) degradan el contraste térmico mediante una mayor convección de enfriamiento. La superficie debe estar seca — el agua estancada o la humedad crean falsos puntos fríos debido al enfriamiento evaporativo. Los estudios son ineficaces durante lluvia, niebla o condiciones nubladas, y durante los meses de invierno (octubre–febrero en latitudes del norte) donde la radiación solar es insuficiente. Algunos DOT recomiendan realizar estudios entre las 11:00 AM y las 2:00 PM hora local en días despejados y soleados desde finales de primavera hasta principios de otoño para obtener resultados óptimos.
La altitud de vuelo determina directamente la Distancia de Muestra en el Suelo (GSD) para las imágenes térmicas — el tamaño físico que representa cada píxel en la superficie inspeccionada. GSD = (Paso de Píxel × Altitud) / Distancia Focal. Para una cámara DJI Zenmuse H20T (12 µm de paso de píxel, 13.5 mm de distancia focal) a 30 m de altitud: GSD = (0.012 × 30) / 13.5 = 0.027 m = 2.7 cm/píxel. A 75 m de altitud: GSD = 6.7 cm/píxel. Una altitud mayor cubre más área por imagen pero reduce la resolución espacial, lo que podría impedir la detección de defectos pequeños. Para la detección de delaminaciones en tableros de puentes, se recomienda un GSD de 3–5 cm/píxel, correspondiente a altitudes de vuelo de 30–60 m según las especificaciones de la cámara. Se utilizan altitudes más bajas (15–25 m) cuando se inspeccionan defectos pequeños o cuando se necesita un mayor contraste térmico. La velocidad del dron debe coordinarse con la altitud y la tasa de cuadros de la cámara para evitar el desenfoque por movimiento — las velocidades típicas de estudio son de 3–8 m/s (10–28 km/h).
El drone IRT detecta defectos subsuperficiales que crean barreras térmicas o alteran el flujo de calor. En tableros de puentes de hormigón: delaminaciones (separaciones horizontales dentro del hormigón, típicamente en el plano de las barras de refuerzo), despegue de capas de rodadura (pérdida de adherencia entre la capa de rodadura asfáltica/de hormigón y el tablero estructural) y vacíos cercanos a la superficie. En pavimentos asfálticos: despegue entre capas (separación entre capas de pavimento), vacíos subsuperficiales por problemas de compactación o fallas de alcantarillas, y acumulación de humedad. La firma térmica: puntos calientes durante el calentamiento solar (contraste positivo) ya que los espacios de aire aíslan la superficie del flujo de calor hacia el material más profundo, o áreas cálidas durante el enfriamiento nocturno (contraste inverso) ya que los defectos retienen el calor por más tiempo. El ΔT típico detectable varía de 0.5 °C para defectos profundos (>75 mm) a 3 °C o más para defectos superficiales. El área mínima detectable de delaminación es de aproximadamente 150×150 mm en buenas condiciones térmicas. La limitación de profundidad es típicamente de 100–150 mm desde la superficie — los defectos más profundos que esto producen un contraste térmico por debajo del umbral NETD de la cámara.
El drone IRT y el IRT montado en vehículo son métodos complementarios con diferentes fortalezas. El IRT montado en vehículo (según ASTM D4788) captura datos térmicos a velocidades de hasta 70 mph (113 km/h) con un ancho de barrido de 15 pies (4.6 m), cubriendo un tablero de puente típico en 30 minutos sin cierre de tráfico. El drone IRT es más lento — la tasa de cobertura típica es de ~475 m²/hora (aproximadamente 51,000 pies cuadrados por día) a velocidades de estudio de 3–8 m/s — pero proporciona acceso a elementos del puente inalcanzables para vehículos: intradós de tableros, caras verticales de pilas, estribos, extremos de vigas, apoyos e interiores de alcantarillas. El drone IRT también permite la inspección desde múltiples ángulos (cenital, oblicuo, vertical) y puede acceder a puentes sobre agua, valles profundos o áreas ambientalmente sensibles donde el acceso vehicular es imposible. El costo por pie cuadrado para drone IRT es de aproximadamente $0.06–$0.12 frente a $0.15–$0.30 para IRT vehicular incluyendo movilización, aunque los estudios con drones requieren más vuelos para una cobertura equivalente del tablero. El enfoque óptimo utiliza IRT vehicular para el cribado rápido del tablero y drone IRT para la inspección específica de elementos inaccesibles.
Se han aplicado varias arquitecturas de aprendizaje profundo a datos de drone IRT para la detección automatizada de defectos. Las redes neuronales convolucionales U-Net logran segmentación semántica a nivel de píxel de anomalías térmicas, produciendo mapas precisos de bordes de defectos con una precisión de clasificación de ~84% reportada en investigaciones. Los modelos de detección de objetos basados en Transformers como Grounding DINO han alcanzado un 70% de Precisión Promedio Media (mAP@[0.5:0.95]) en datos térmicos de tableros de puentes con un 0.89 de Intersección sobre Unión (IoU) promedio. Las variantes de YOLO (You Only Look Once) permiten la detección en tiempo real durante el vuelo para retroalimentación inmediata al operador. Los clasificadores basados en CNN distinguen delaminaciones de falsos positivos (características superficiales, humedad, escombros) aprendiendo firmas térmicas características — tamaño, forma, nitidez de bordes, magnitud de ΔT y contexto espacial. Los métodos de extracción de características analizan parámetros de textura térmica como temperatura media, desviación estándar, asimetría, curtosis y entropía dentro de ventanas deslizantes. La Universidad de Florida Central demostró un marco de IA-IRT utilizando un modelo Transformer entrenado con más de 23,000 imágenes IR de drones/vehículos de tres puentes de Florida en condiciones diurnas y nocturnas.
Las operaciones de drone IRT deben cumplir con las regulaciones de las autoridades de aviación nacionales. En Estados Unidos, la Parte 107 de la FAA regula las operaciones comerciales con drones, requiriendo certificación de Piloto Remoto, registro de la aeronave (250 g+), línea de visión visual (VLOS), altitud máxima de 400 ft (120 m) AGL, y prohibición de vuelo sobre personas a menos que se tenga una exención. Los estudios nocturnos de IRT requieren una exención nocturna de la Parte 107 o el cumplimiento de la regla de operaciones nocturnas de 2021 (iluminación anticolisión, certificado de piloto remoto actualizado). Las operaciones más allá de la línea de visión visual (BVLOS) — necesarias para tramos largos de pavimento o tableros de puentes grandes — requieren una exención BVLOS de la Parte 107 con un caso de seguridad aprobado. En Europa, el Reglamento EASA 2019/947 clasifica la inspección de infraestructura como categoría Específica, requiriendo autorización operativa, evaluación de riesgos según metodología SORA y un certificado de operador UAS. La Circular 328 de la OACI (2011) y el Reglamento Modelo de UAS de la OACI (2020) proporcionan un marco regulatorio adoptado por muchos países. Los operadores de drones también deben cumplir con las restricciones del espacio aéreo local (proximidad a aeropuertos, autorizaciones de espacio aéreo controlado a través de LAANC en EE. UU.), leyes de privacidad y regulaciones de protección de datos.
El procesamiento de datos de drone IRT comienza con la calibración radiométrica de las secuencias de imágenes térmicas sin procesar, convirtiendo los conteos del detector en valores de temperatura física utilizando datos de calibración de fábrica y correcciones de transmisión atmosférica. Las imágenes térmicas individuales georreferenciadas se unen en ortomosaicos mediante fotogrametría Structure-from-Motion (SfM) — requiriendo un 70–80% de superposición frontal y un 60–70% de superposición lateral entre imágenes. El mosaico térmico se alinea con los planos del puente o datos GIS utilizando coordenadas GPS RTK y puntos de control en tierra para una precisión absoluta de 2–5 cm. La normalización de temperatura corrige las variaciones espaciales en la carga solar, la respuesta de la cámara y la temperatura ambiente en todo el mosaico. Los modelos de detección de IA escanean el mosaico normalizado en busca de anomalías térmicas, que se exportan como shapefiles georreferenciados o capas de polígonos GeoJSON. Cada anomalía se clasifica por gravedad según la magnitud de ΔT: ΔT < 1 °C (monitorear, prioridad baja), ΔT 1–3 °C (programar reparación, prioridad moderada), ΔT 3–10 °C (reparar pronto, prioridad alta), ΔT > 10 °C (reparación inmediata, prioridad crítica). Los resultados se compilan en informes de inspección con mapas térmicos superpuestos sobre esquemas del puente, tablas de anomalías con coordenadas y dimensiones, clasificaciones de gravedad y acciones de seguimiento recomendadas. La integración con datos de inspección visual de TarmacView proporciona una base de datos integral de defectos para sistemas de gestión de puentes.
El drone IRT tiene varias limitaciones importantes. (1) Dependencia ambiental: requiere cielos despejados, ≥250 W-h/m² de radiación solar, viento bajo (<15 mph), superficie seca — las ventanas de estudio se restringen a ~30% de las horas diurnas en climas templados. (2) Limitación de profundidad: detecta defectos de forma fiable solo dentro de los 100–150 mm de la superficie; los defectos más profundos producen un contraste térmico por debajo del umbral de detección. (3) Atenuación de capas de rodadura: las capas de rodadura de asfalto u hormigón reducen el contraste térmico en un 50% o más con 50 mm de espesor; las capas de rodadura de más de 100 mm pueden impedir la detección. (4) Sin medición de profundidad inherente: el drone IRT convencional no puede determinar la profundidad del defecto sin métodos de lapso de tiempo o END complementarios. (5) Autonomía de vuelo: los vuelos típicos limitados por batería de 20–30 minutos restringen la cobertura por vuelo a ~2–4 hectáreas (5–10 acres). (6) Falsos positivos: las características superficiales — manchas de aceite, depósitos de caucho, humedad, sombras, variaciones de textura superficial, escombros — crean anomalías térmicas que pueden confundirse con defectos. (7) Restricciones regulatorias: el requisito VLOS limita el alcance continuo de la inspección; las exenciones BVLOS requieren una extensa documentación de seguridad. (8) Variabilidad de la emisividad superficial: la emisividad del hormigón y el asfalto varía según el tipo de árido, la textura superficial, el contenido de humedad y la meteorización, afectando la precisión de la medición de temperatura.
Implemente Drone IRT para Inspecciones de Puentes
Combine la imagen térmica montada en UAV con análisis impulsados por IA para la detección rápida y sin contacto de delaminaciones en tableros de puentes y pavimentos. Obtenga informes automatizados de anomalías térmicas con integración GIS — sin necesidad de cierres de carriles.
Inspección automatizada de infraestructura con drones
La inspección automatizada con drones utiliza rutas de vuelo preprogramadas, visión artificial y análisis de IA para inspeccionar activos de infraestructura, in...
La imagen térmica visualiza las variaciones de temperatura detectando la radiación infrarroja, permitiendo aplicaciones en la industria, seguridad, salud y más....
Planificación de Vuelo de Drones para Inspección de Infraestructura
La planificación de vuelo de drones para inspección de infraestructura implica diseñar rutas de vuelo automatizadas (misiones de waypoints) con altitud, velocid...
31 min de lectura
Drone
UAV
+8
Consentimiento de Cookies Usamos cookies para mejorar tu experiencia de navegación y analizar nuestro tráfico. See our privacy policy.