Le recouvrement d’images (recouvrement longitudinal et recouvrement latéral) est le pourcentage de la surface d’image partagée entre des photos consécutives et adjacentes dans un levé photogrammétrique. Les exigences typiques sont de 75 à 80 % de recouvrement longitudinal et de 60 à 70 % de recouvrement latéral pour la cartographie et l’inspection d’infrastructures.
Le recouvrement d’images est le pourcentage de la surface totale de l’image partagée entre deux ou plusieurs photographies aériennes successives. C’est le paramètre d’acquisition le plus critique en photogrammétrie, déterminant directement si la reconstruction 3D automatisée réussit ou échoue. Sans un recouvrement adéquat, les algorithmes de Structure par Mouvement (SfM) ne peuvent pas trouver de points de liaison fiables entre les images, les positions de la caméra ne peuvent pas être triangulées, et le nuage de points ou l’orthomosaïque qui en résulte contient des lacunes, des distorsions et des erreurs de mesure.
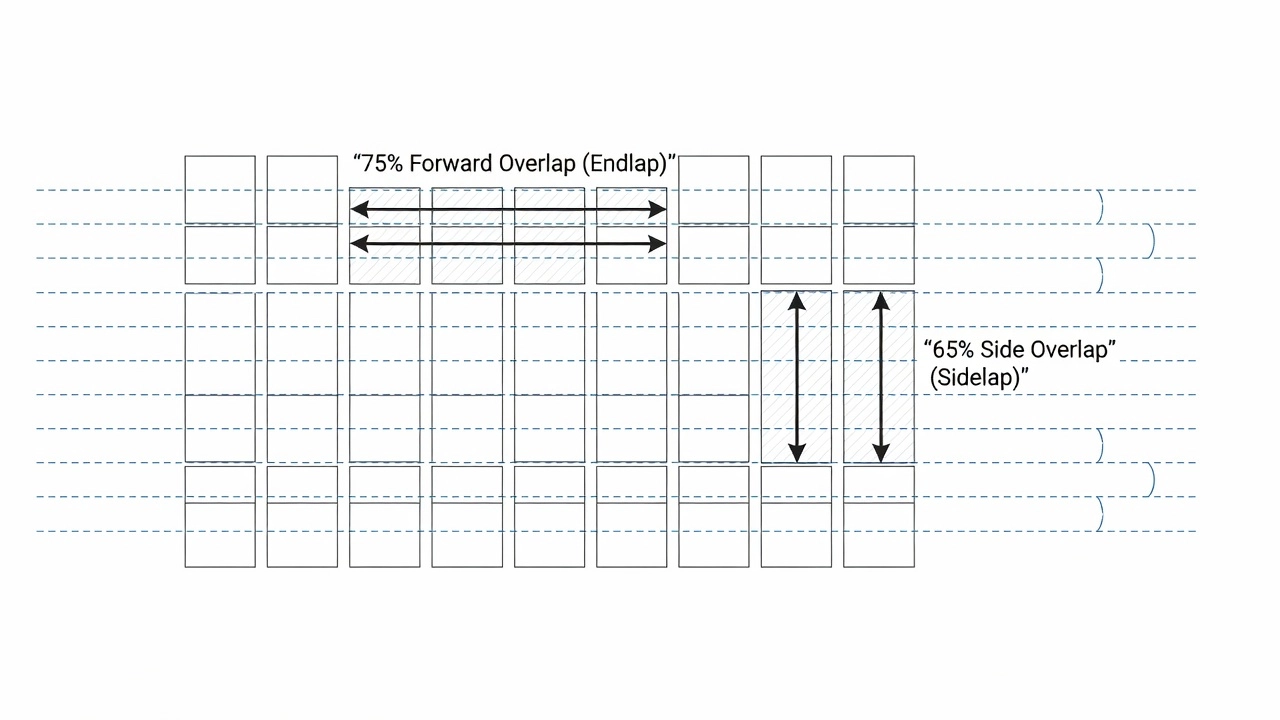
Le recouvrement s’exprime par deux paramètres indépendants : le recouvrement longitudinal (également appelé endlap ou recouvrement le long de la trajectoire), qui est le recouvrement entre des images consécutives dans la direction du vol, et le recouvrement latéral (également appelé sidelap, recouvrement latéral ou recouvrement transversal), qui est le recouvrement entre des images de lignes de vol adjacentes volées côte à côte. Ces deux paramètres doivent être configurés indépendamment dans le logiciel de planification de mission et sont influencés par l’altitude de vol, la géométrie du capteur de la caméra, la vitesse au sol et l’intervalle de déclenchement de la caméra.
Le principe mathématique sous-jacent au recouvrement d’images est l’exigence photogrammétrique que chaque point au sol soit visible dans au moins deux, et idéalement trois images ou plus, provenant de différentes positions de la caméra. Cette géométrie multivue permet la triangulation par lignes épipolaires — le cœur de la photogrammétrie automatisée — où les coordonnées 3D d’un point quelconque sont calculées en trouvant son emplacement pixel correspondant dans plusieurs images se chevauchant et en résolvant l’intersection des lignes de rayon depuis chaque position de la caméra à travers ce pixel.
Définition du recouvrement longitudinal (Endlap)
Le recouvrement longitudinal est le pourcentage de la surface de l’image qui est partagée entre deux photographies consécutives capturées séquentiellement le long d’une seule ligne de vol. Il est exprimé en pourcentage de la dimension longitudinale de l’image (la dimension de l’empreinte au sol de l’image dans la direction du vol). Si des images consécutives partagent 80 % de leur surface longitudinale, le recouvrement longitudinal est de 80 %.
Le recouvrement longitudinal détermine combien de fois un point au sol donné le long de la trajectoire de vol sera imagé. À 80 % de recouvrement longitudinal, chaque point au sol apparaît dans toutes les images dont la position couvre ce point — généralement 5 à 7 images pour une seule ligne de vol. Cette multiplicité est essentielle pour un appariement fiable des points de liaison : le pipeline SfM nécessite au moins trois observations de chaque point de liaison pour résoudre avec précision la position et l’orientation de la caméra, et des observations supplémentaires améliorent la redondance qui favorise la précision.
Le recouvrement longitudinal est également appelé endlap dans la littérature photogrammétrique aérienne traditionnelle. Le terme « endlap » provient de l’ère des caméras argentiques aériennes analogiques montées sur des avions pilotés, où la bande de film d’une seule course de vol était physiquement chevauchée bout à bout pour une visualisation stéréoscopique. Le terme persiste dans la photogrammétrie numérique moderne, bien que « recouvrement longitudinal » et « recouvrement le long de la trajectoire » soient plus descriptifs pour les opérations par drone.
Le calcul du recouvrement longitudinal dépend de trois paramètres : la dimension de l’empreinte au sol de l’image dans la direction du vol, la vitesse de vol au sol, et l’intervalle de déclenchement de la caméra. Pour une empreinte au sol d’image donnée (déterminée par l’altitude de vol et le champ de vision de la caméra), le recouvrement longitudinal souhaité détermine la distance maximale autorisée entre les positions consécutives de la caméra :
D_max = L × (1 — O_f / 100)
Où D_max est la distance maximale entre les stations d’exposition consécutives, L est la longueur de l’empreinte au sol de l’image dans la direction du vol, et O_f est le pourcentage de recouvrement longitudinal souhaité. Pour une empreinte au sol d’image de 100 m longitudinal et un recouvrement longitudinal souhaité de 80 %, la caméra doit déclencher tous les 20 m de déplacement vers l’avant.
Définition du recouvrement latéral (Sidelap)
Le recouvrement latéral est le pourcentage de la surface de l’image partagée entre des images de lignes de vol adjacentes. Il est exprimé en pourcentage de la dimension transversale de l’image (la dimension de l’empreinte au sol de l’image perpendiculairement à la direction du vol). Si les images de deux lignes de vol adjacentes partagent 65 % de leur surface latérale, le recouvrement latéral est de 65 %.
Le recouvrement latéral est également appelé sidelap, recouvrement latéral ou recouvrement transversal. En photogrammétrie traditionnelle, le sidelap était le recouvrement entre des bandes de film adjacentes dans un bloc de cartographie. Dans les opérations par drone, le recouvrement latéral est le recouvrement entre deux lignes de vol parallèles dans une mission en grille.
Le recouvrement latéral détermine s’il y a des lacunes dans la couverture entre les lignes de vol adjacentes. À 60 % de recouvrement latéral, les bords de la couverture effective d’une ligne de vol chevauchent ceux de la suivante à hauteur de 60 % de la dimension transversale de l’image, assurant une couverture continue sur toute la largeur de la zone de levé. En dessous de 30 % de recouvrement latéral, la couverture entre les lignes de vol devient discontinue, créant des lacunes réelles dans l’imagerie où aucune donnée n’existe.
L’espacement entre les lignes de vol est calculé à partir de l’exigence de recouvrement latéral :
S = L × (1 — O_l / 100)
Où S est l’espacement entre les lignes de vol adjacentes, L est la largeur de l’empreinte au sol de l’image perpendiculairement à la direction du vol, et O_l est le pourcentage de recouvrement latéral souhaité. Pour une empreinte au sol d’image de 150 m transversal et un recouvrement latéral souhaité de 65 %, les lignes de vol doivent être espacées de 52,5 m.
Paramètre
Recouvrement longitudinal (Endlap)
Recouvrement latéral (Sidelap)
Direction
Le long de la trajectoire de vol
Entre lignes de vol adjacentes
Valeur typique
75-85 %
60-75 %
Minimum pour fiabilité
70 %
30 %
Impact sur le temps de vol
Plus de recouvrement = plus d’images par ligne de vol
Plus de recouvrement = plus de lignes de vol
Effet principal
Assure la couverture le long de chaque bande de vol
Assure la couverture sur la largeur du levé
Variables clés
Vitesse de vol, intervalle de déclenchement, altitude
Espacement des lignes de vol, altitude, largeur du capteur
Recouvrement d’images dans la Structure par Mouvement
La Structure par Mouvement (SfM) est le moteur computationnel qui alimente la photogrammétrie numérique moderne. Les algorithmes SfM traitent des images 2D se chevauchant pour reconstruire simultanément les positions de la caméra, les orientations de la caméra et la géométrie 3D de la scène. Le recouvrement d’images est la condition préalable fondamentale sans laquelle la SfM ne peut pas fonctionner.
Le pipeline SfM commence par la détection de caractéristiques — des algorithmes comme SIFT (Scale-Invariant Feature Transform), SURF (Speeded-Up Robust Features) ou AKAZE identifient des points distinctifs dans chaque image, tels que les coins, les bords et les zones de texture. Ces caractéristiques doivent être robustes, c’est-à-dire qu’elles peuvent être détectées de manière fiable indépendamment des changements d’éclairage, des différences d’échelle et des petits changements de perspective entre les images. La densité et la détectabilité de ces caractéristiques dépendent de la texture de la surface — l’herbe, le gravier et les marquages au sol produisent des caractéristiques abondantes, tandis que l’asphalte uniforme, la couverture neigeuse et les surfaces d’eau en produisent très peu.
L’étape suivante est l’appariement de caractéristiques, où le logiciel trouve des caractéristiques correspondantes entre les paires d’images. C’est là que le recouvrement est critique : si deux images ne se chevauchent pas, elles ne partagent aucune zone au sol, donc aucune caractéristique ne peut être appariée entre elles. Même lorsque les images se chevauchent, le taux de réussite de l’appariement dépend du pourcentage de recouvrement. Les recherches montrent que les taux de réussite d’appariement chutent considérablement en dessous de 60 % de recouvrement longitudinal. À 80 % de recouvrement, les taux d’appariement typiques entre images adjacentes sont de 1 000 à 5 000 points de liaison par paire d’images. À 50 % de recouvrement, cela tombe à 100-500 points de liaison, et en dessous de 40 %, l’appariement fiable échoue souvent complètement.
La troisième étape est l’estimation de la pose de la caméra via l’ajustement de faisceau. Le logiciel résout la position (X, Y, Z) et l’orientation (roulis, tangage, lacet) de chaque caméra au moment de l’exposition, ainsi que les coordonnées 3D de chaque point de liaison apparié. Il s’agit d’un problème d’optimisation non linéaire aux moindres carrés, et la qualité de la solution dépend de manière critique de deux facteurs : le nombre d’images dans lesquelles chaque point de liaison apparaît, et la configuration géométrique de ces images.
La règle empirique en photogrammétrie est que chaque point au sol doit apparaître dans au moins trois images pour une reconstruction fiable. Avec 80 % de recouvrement longitudinal et 65 % de recouvrement latéral, chaque point de la partie centrale d’un levé en grille apparaît dans 6 à 12 images, offrant de fortes contraintes géométriques. Passer à 60 % de recouvrement longitudinal et 40 % de recouvrement latéral réduit cela à 3-5 images par point, les points près des limites du levé n’apparaissant que dans 2-3 images — le seuil minimum de fiabilité.
La stéréoscopie multivue (MVS) — l’étape d’appariement dense qui suit la SfM — est encore plus sensible au recouvrement. Là où la SfM n’a besoin que d’apparier des caractéristiques éparses, la MVS tente de produire une estimation de profondeur pour chaque pixel, créant un nuage de points dense de millions de points. Les algorithmes MVS évaluent la cohérence photométrique de petites zones d’image à travers plusieurs vues, et la qualité de ces estimations de profondeur s’améliore avec le nombre de vues se chevauchant. Les zones imagées par seulement 2-3 caméras présentent des cartes de profondeur bruitées et incomplètes, tandis que les zones imagées par 5+ caméras produisent des reconstructions propres et complètes.
Exigences typiques de recouvrement
Les exigences standard de recouvrement pour la photogrammétrie par drone ont été établies par des décennies de pratique photogrammétrique, validées par des recherches académiques approfondies. Les valeurs ci-dessous représentent des recommandations polyvalentes qui s’appliquent à la plupart des scénarios de levé.
Pour la génération d’orthomosaïques — produire une carte aérienne continue et géométriquement corrigée — le recouvrement longitudinal minimum est de 60 % et le recouvrement latéral minimum est de 30 %. Ce sont les limites inférieures absolues en dessous desquelles le logiciel de photogrammétrie ne peut pas produire une orthomosaïque continue sans coutures ou lacunes visibles. Cependant, la plupart des praticiens recommandent 75-85 % de recouvrement longitudinal et 60-70 % de recouvrement latéral pour des orthomosaïques de qualité professionnelle. Les valeurs plus élevées fournissent la redondance nécessaire pour une orthorectification précise, qui corrige la position de chaque pixel en fonction de l’élévation du terrain et de la perspective de la caméra.
Pour la génération de nuages de points 3D — produire un modèle 3D détaillé et mesurable de la surface — les exigences sont plus strictes. Un recouvrement longitudinal de 75-85 % et un recouvrement latéral de 60-75 % sont la norme. Le recouvrement supplémentaire garantit que chaque point au sol est imagé depuis au moins 5 à 8 positions de caméra différentes, fournissant la diversité géométrique nécessaire pour une estimation précise de la profondeur lors de l’étape d’appariement dense.
Pour les levés de haute précision — où des précisions de mesure de 1 à 3 cm (0,5 à 1 pouce) sont requises — un recouvrement longitudinal de 80-85 % et un recouvrement latéral de 70-80 % sont recommandés. À ces niveaux de recouvrement, le réseau photogrammétrique dispose d’une redondance suffisante pour compenser les erreurs de positionnement GPS, l’inclinaison de la caméra due au vent et d’autres sources d’incertitude. Les recherches académiques publiées dans Remote Sensing montrent systématiquement que l’augmentation du recouvrement de 70 % à 80 % améliore la précision verticale de 25 à 40 %, tandis que l’augmentation au-delà de 85 % montre des rendements décroissants.
Pour l’inspection d’infrastructures — tabliers de ponts, surfaces de chaussées, évaluation de l’état des pistes — un recouvrement longitudinal de 80-85 % et un recouvrement latéral de 70-80 % sont la norme. Le recouvrement plus élevé garantit que les petits défauts de surface (fissures, éclats, défaillances de joints) sont visibles dans plusieurs images sous plusieurs angles, améliorant les taux de détection et la précision des mesures.
Application
Recouvrement longitudinal
Recouvrement latéral
Justification
Orthomosaïque
75-80 %
60-65 %
Production de cartes sans couture
Modèle 3D (standard)
75-80 %
60-70 %
Reconstruction complète de la surface
Levé de haute précision
80-85 %
70-80 %
Précision sub-centimétrique
Inspection de chaussée
80-85 %
70-75 %
Détection de fissures à 0,3 mm
Inspection de tablier de pont
80-85 %
70-80 %
Identification des défauts structurels
Cartographie urbaine
85-90 %
70-80 %
Reconstruction de bâtiments
Agriculture/NDVI
70-75 %
55-65 %
Couverture efficace des champs
Cartographie de grandes zones
70-75 %
55-60 %
Équilibre couverture/temps de vol
Effets d’un recouvrement insuffisant
Opérer en dessous des seuils de recouvrement recommandés produit une cascade d’effets négatifs qui dégradent ou détruisent le résultat photogrammétrique.
Lacunes de reconstruction — le symptôme le plus évident d’un recouvrement insuffisant. Lorsque deux images adjacentes ne partagent pas suffisamment de surface au sol, l’algorithme SfM ne peut pas trouver de points de liaison entre elles, et la reconstruction de cette zone échoue complètement. Dans le nuage de points ou l’orthomosaïque final, ces lacunes apparaissent comme des trous ou des données manquantes. Dans les cas graves, le bloc entier d’images ne parvient pas à s’aligner en un seul modèle cohérent, se fragmentant en grappes déconnectées.
Échec de l’appariement des points de liaison — se produit lorsque la zone de recouvrement entre deux images est trop petite pour contenir suffisamment de caractéristiques distinctives. Sur les surfaces uniformes comme l’asphalte ou le béton, même 60 % de recouvrement peut ne pas produire suffisamment de points d’appariement car la surface manque de texture. Sur de telles surfaces, un recouvrement de 80 % ou plus peut être nécessaire pour trouver suffisamment de caractéristiques pour un appariement fiable.
Précision de position réduite — même lorsque la reconstruction réussit à des niveaux de recouvrement marginaux, la précision du résultat est compromise. Chaque mesure provenant du nuage de points ou de l’orthomosaïque comporte une plus grande incertitude. Les recherches académiques démontrent que la réduction du recouvrement longitudinal de 80 % à 60 % augmente le bruit du nuage de points d’environ 50 % et réduit la précision horizontale de 25 à 40 %.
Mauvaise qualité des bords — un recouvrement insuffisant aux limites de la zone de levé produit des bords d’orthomosaïque avec des distorsions visibles, des lignes de couture et un désalignement. Les images les plus externes manquent de l’ensemble complet des vues voisines qui fournissent des contraintes géométriques, les rendant plus susceptibles aux erreurs de positionnement.
Erreur de reprojection accrue — dans la solution d’ajustement de faisceau, l’erreur de reprojection (la distance moyenne entre l’emplacement projeté d’un point de liaison dans une image et son emplacement observé) augmente. Une erreur de reprojection plus élevée indique une solution plus faible avec moins de cohérence interne. Bien qu’une certaine erreur de reprojection soit inévitable, des valeurs significativement supérieures à 0,5 pixel indiquent une solution géométrique faible.
Échec de l’estimation de profondeur — l’étape de stéréoscopie multivue nécessite au moins 3 vues se chevauchant (et de préférence 5+) pour chaque pixel afin de produire une estimation de profondeur fiable. Avec un recouvrement insuffisant, de grandes zones de l’image auront des estimations de profondeur bruitées, incomplètes ou entièrement manquantes, produisant des trous dans le nuage de points dense.
Effets d’un recouvrement excessif
Bien qu’un recouvrement plus important soit généralement préférable à un moindre, un recouvrement excessif entraîne des coûts significatifs qui doivent être équilibrés par rapport aux gains marginaux de précision.
Augmentation du temps de vol — un recouvrement plus élevé signifie plus d’images par unité de surface, ce qui nécessite plus de lignes de vol, plus de déclenchements de caméra et une durée totale de mission plus longue. L’augmentation du recouvrement longitudinal de 75 % à 90 % double approximativement le nombre d’images par ligne de vol. Pour une mission qui prendrait 20 minutes à 75 % de recouvrement, 90 % de recouvrement prendrait environ 35 à 40 minutes, nécessitant potentiellement une batterie supplémentaire.
Augmentation des besoins de stockage — plus d’images consomment plus de stockage sur la carte mémoire du drone et sur l’ordinateur de traitement. Un levé qui produit 500 images à 75 % de recouvrement peut produire 1 500 images à 90 % de recouvrement. À 20 Mo par image (typique pour un capteur de 20 MP), cela représente la différence entre 10 Go et 30 Go de stockage.
Augmentation exponentielle du temps de traitement — le coût computationnel du traitement photogrammétrique n’est pas linéaire par rapport au nombre d’images. L’étape d’appariement SfM compare chaque image à toutes les autres images qui pourraient se chevaucher. À 75 % de recouvrement avec 500 images organisées en grille régulière, chaque image chevauche environ 12 à 16 voisins, produisant environ 5 000 paires d’images à apparier. À 90 % de recouvrement, chaque image chevauche 30 à 40 voisins, produisant 15 000 à 20 000 paires d’images. Le temps de traitement augmente proportionnellement au nombre de paires d’images, rendant les levés à 90 % de recouvrement 3 à 5 fois plus lents à traiter que les levés à 75 % de recouvrement.
Données sans bénéfice — au-delà d’environ 85 % de recouvrement longitudinal et 75 % de recouvrement latéral, un recouvrement supplémentaire apporte des améliorations négligeables à la qualité de la reconstruction. La solution SfM est déjà bien contrainte par la géométrie d’image existante, et l’ajout de vues redondantes n’apporte aucune nouvelle information géométrique. Les images supplémentaires ne font que dupliquer des observations existantes, ajoutant une charge computationnelle sans gains significatifs de précision.
Niveau de recouvrement
Images par unité de surface
Temps de traitement relatif
Gain de précision vs référence 75/65
75 %/65 %
1× (référence)
1× (référence)
—
80 %/70 %
1,3×
1,5×
+15-20 %
85 %/75 %
2×
3×
+25-35 %
90 %/80 %
3,5×
5×
+30-40 %
95 %/85 %
8×
15×
+32-42 %
Les données montrent clairement des rendements décroissants : le gain de précision de 85 % à 95 % de recouvrement est inférieur à 10 %, tandis que le coût computationnel augmente de 5×. L’optimum pratique pour la plupart des applications se situe entre 75 et 85 % de recouvrement longitudinal et 60 à 75 % de recouvrement latéral.
Recouvrement pour l’inspection des chaussées et des pistes
L’inspection des chaussées par drone nécessite des considérations de recouvrement spécialisées en raison des caractéristiques uniques des surfaces de chaussée : grandes zones uniformes à faible texture, haute réflectivité et nécessité de détecter les petits défauts de surface.
Le défi de la faible texture. Les surfaces de chaussée en asphalte et en béton ont une texture visuelle limitée — elles manquent d’herbe, de gravier, de sol et de végétation qui fournissent des points de liaison abondants dans les levés de terrain naturel. L’algorithme SfM a moins de caractéristiques à apparier entre les images se chevauchant, rendant l’alignement fiable plus difficile. Un recouvrement plus élevé compense cela en offrant plus de zone d’appariement potentielle, augmentant la probabilité que l’ensemble réduit de caractéristiques trouve tout de même des correspondances suffisantes.
Recouvrement recommandé pour la chaussée. Pour l’inspection des chaussées, un recouvrement longitudinal de 80-85 % et un recouvrement latéral de 70-75 % sont la norme. Cette base de référence plus élevée garantit une reconstruction fiable même sur les surfaces de chaussée les plus uniformes. Certaines agences spécifient 85 % de recouvrement longitudinal pour les inspections de pistes afin de garantir que chaque mètre carré de surface de piste apparaisse dans au moins 7 à 9 images.
Exigences de détection des fissures. La largeur minimale de fissure détectable dans une orthomosaïque est d’environ 2 à 3 fois la distance d’échantillonnage au sol (GSD). À 1 cm de GSD (typique pour l’inspection des chaussées à 60-80 m d’altitude), des fissures aussi étroites que 2-3 mm peuvent être résolues. Cependant, une mesure précise de la largeur des fissures nécessite que la fissure soit visible dans plusieurs images se chevauchant pour moyenner le bruit au niveau du pixel et les effets de perspective. Un recouvrement plus élevé offre plus de redondance de mesure et améliore la précision de la mesure de la largeur des fissures.
Levés d’indice de condition des chaussées (PCI). La norme ASTM D5340 pour l’évaluation de l’indice de condition des chaussées exige que les inspecteurs identifient et quantifient les types de détérioration de surface, y compris la fissuration, l’orniérage, le désenrobage, le rapiéçage et les nids-de-poule. Les levés PCI par drone utilisant une imagerie à haut recouvrement peuvent atteindre 90 à 95 % de concordance avec les levés au sol pour l’identification des détériorations, avec une collecte de données nettement plus rapide et une documentation photographique complète.
Détection de FOD sur les pistes. La détection de débris d’objets étrangers (FOD) sur les pistes d’aéroport nécessite une GSD de 5 mm ou moins et un recouvrement très élevé pour garantir une couverture complète. Un recouvrement longitudinal de 85-90 % et un recouvrement latéral de 75-80 % sont typiques pour les levés FOD. Avec ces paramètres, un levé de piste standard nécessite plusieurs centaines d’images par kilomètre de longueur de piste. Le recouvrement élevé garantit que même les petits débris (écrous, boulons, fragments de pneu) sont capturés dans plusieurs images, réduisant la probabilité de détections manquées.
Recouvrement pour l’inspection des ponts
L’inspection des ponts par drone présente des défis uniques en matière de recouvrement en raison de la géométrie 3D complexe des structures de pont. Un pont typique comprend une surface de tablier, des poutres, des appareils d’appui, des culées, des piliers et des dalles de transition — chacun nécessitant des stratégies de recouvrement différentes.
Surface du tablier. Le tablier du pont — la surface de chaussée du pont — est levé en utilisant une imagerie nadir standard avec 80-85 % de recouvrement longitudinal et 70-80 % de recouvrement latéral. Le tablier est généralement la partie la plus facile du pont à imager, car le drone peut voler directement au-dessus en motif de grille. Le recouvrement plus élevé par rapport à la cartographie standard est nécessaire car les tabliers de pont ont souvent des surfaces métalliques, des joints de dilatation et d’autres caractéristiques à faible texture qui réduisent le nombre de points de liaison disponibles.
Poutres et sous-face. Les poutres et la sous-face du tablier du pont nécessitent des angles de caméra obliques ou horizontaux, généralement volés en motifs orbitaux en dessous ou le long du pont. Pour ces angles de capture, un recouvrement longitudinal de 70-80 % est recommandé, reconnaissant que la géométrie des vols orbitaux rend un recouvrement cohérent plus difficile à atteindre. La géométrie complexe des poutres et des longerons crée des occultations et des décalages de parallaxe qui compliquent l’appariement des caractéristiques, donc le recouvrement supplémentaire aide à garantir une reconstruction fiable.
Appareils d’appui et piliers. Les appareils d’appui de pont — les assemblages mécaniques qui transfèrent les charges entre la superstructure et l’infrastructure — nécessitent une inspection à courte distance avec un recouvrement très élevé. Pour l’inspection des appareils d’appui, les images sont capturées à courte distance (3-10 m) avec 80-90 % de recouvrement longitudinal pour garantir que chaque surface d’appui soit capturée sous plusieurs angles. Les défauts des appareils d’appui (corrosion, fissuration, déplacement) sont souvent petits et nécessitent une documentation détaillée multi-perspective.
Résultats de recherche FHWA. Les recherches publiées par la Federal Highway Administration (FHWA) et dans des revues comme Remote Sensing ont systématiquement évalué les exigences de recouvrement pour la photogrammétrie d’inspection des ponts. Une étude de 2022 a révélé que 80 % de recouvrement longitudinal avec 70 % de recouvrement latéral produisait des modèles 3D complets de ponts avec des densités de nuage de points suffisantes pour détecter des fissures de 0,3 mm de largeur sur des surfaces en béton. La réduction du recouvrement à 60 % longitudinal / 40 % latéral a entraîné 30 % du modèle de pont présentant des lacunes de reconstruction, en particulier dans les zones ombragées sous le tablier.
Élément du pont
Angle de caméra
Recouvrement longitudinal
Recouvrement latéral
Notes
Surface du tablier
Nadir
80-85 %
70-80 %
Vol en grille
Poutres
Oblique (30-45°)
75-80 %
65-75 %
Passage orbital ou linéaire
Appareils d’appui
Horizontal-oblique
80-90 %
70-80 %
Orbites à courte distance
Culées
Oblique (45-60°)
70-80 %
60-70 %
Surfaces verticales
Piliers
Oblique (45-60°)
70-80 %
60-70 %
Passages multidirectionnels
Planification de vol pour le recouvrement d’images
Atteindre le bon recouvrement d’images en pratique nécessite une planification de vol minutieuse qui tient compte de la géométrie spécifique de la zone de levé et des capacités du drone et de la caméra.
Processus de planification de vol. Le processus standard commence par la définition de la limite de la zone de levé, puis la sélection de la GSD et des pourcentages de recouvrement souhaités dans le logiciel de planification de mission. Le logiciel calcule l’altitude de vol requise, l’espacement des lignes de vol et l’intervalle de déclenchement de la caméra, puis génère une trajectoire de vol. Les outils de planification modernes comme DroneDeploy, Pix4Dcapture, DJI Pilot 2 et UGCS automatisent ce calcul, mais l’opérateur doit comprendre les paramètres sous-jacents pour vérifier que le plan est correct.
Sélection de l’altitude. L’altitude de vol détermine à la fois la GSD et l’empreinte au sol de l’image. Une altitude plus élevée produit des empreintes au sol plus grandes, ce qui signifie que moins d’images sont nécessaires pour couvrir la zone de levé. Cependant, une altitude plus élevée signifie également une GSD plus grossière. La relation entre l’altitude, la GSD et le recouvrement est :
Où L_long et L_trans sont respectivement les dimensions longitudinale et transversale de l’empreinte au sol, Alt est l’altitude de vol au-dessus du niveau du sol, Hauteur_capteur et Largeur_capteur sont les dimensions physiques du capteur de la caméra, et Longueur_focale est la distance focale de l’objectif.
Intervalle de déclenchement de la caméra. Le temps entre les expositions consécutives de la caméra détermine le recouvrement longitudinal. L’intervalle de déclenchement est calculé comme suit :
Pour un drone volant à 10 m/s avec une empreinte au sol longitudinale de 120 m et un recouvrement longitudinal souhaité de 80 %, la caméra doit déclencher toutes les 2,4 secondes. Le logiciel de planification de mission gère généralement ce calcul automatiquement, mais une vérification manuelle est conseillée pour les levés critiques.
Espacement des lignes de vol. La distance entre les lignes de vol adjacentes détermine le recouvrement latéral :
Espacement_lignes = L_trans × (1 — O_l / 100)
Pour une empreinte au sol transversale de 160 m et un recouvrement latéral souhaité de 65 %, les lignes de vol doivent être espacées de 56 m.
Considérations de vitesse. Des vitesses de vol plus élevées nécessitent des intervalles de déclenchement plus rapides pour maintenir le même recouvrement longitudinal. À 15 m/s, l’intervalle de déclenchement pour 80 % de recouvrement longitudinal avec une empreinte de 120 m est de seulement 1,6 seconde. Toutes les caméras ne peuvent pas soutenir des taux de capture aussi rapides, en particulier lors de l’écriture sur une carte mémoire. La fréquence d’images maximale de la caméra (généralement 0,5 à 2 fps pour les caméras de cartographie professionnelles) impose une limite stricte au recouvrement réalisable à une vitesse donnée. Lorsqu’un recouvrement plus élevé est requis, le drone doit voler plus lentement.
Effets du vent. Le vent peut faire varier la vitesse au sol réelle du drone par rapport à la vitesse planifiée. Un vent de face réduit la vitesse au sol, augmentant ainsi le recouvrement longitudinal. Un vent arrière augmente la vitesse au sol, réduisant le recouvrement longitudinal. Pour les levés avec des tolérances de recouvrement extrêmes, le logiciel de planification de mission doit être configuré pour utiliser un déclenchement basé sur la vitesse au sol plutôt qu’un déclenchement temporel, garantissant un recouvrement cohérent quelles que soient les conditions de vent.
Gestion de la batterie. Un recouvrement plus élevé génère plus d’images et des temps de vol plus longs. Un levé typique à 80/65 de recouvrement nécessite environ 20 à 25 minutes par 50 hectares à 100 m d’altitude. L’augmentation à 85/75 de recouvrement prolonge cela à 35-40 minutes. Pour les grandes zones, la mission doit être segmentée en plusieurs vols qui sont ensuite fusionnés dans le logiciel de traitement.
Effets du terrain sur le recouvrement d’images
Le logiciel de planification de vol calcule le recouvrement en fonction de l’altitude planifiée au-dessus du niveau du sol (AGL). Cependant, le terrain réel est rarement plat, et le recouvrement réel au niveau du sol peut différer considérablement des valeurs planifiées.
Le problème de l’élévation du terrain. Lorsque le drone vole à une AGL planifiée au-dessus d’un terrain avec des variations d’élévation significatives, la distance réelle au sol varie. Au-dessus des sommets, le drone est plus proche que prévu, réduisant l’empreinte au sol réelle de l’image et augmentant la GSD. Dans les vallées, le drone est plus loin que prévu, augmentant l’empreinte au sol de l’image et dégradant la GSD. Le pourcentage de recouvrement change en conséquence — le recouvrement augmente au-dessus des sommets (où l’empreinte de l’image se rétrécit) et diminue dans les vallées (où l’empreinte s’élargit).
Vol en suivi de terrain. Les modes de vol en suivi de terrain utilisent un modèle numérique d’élévation (MNE) préchargé ou une détection d’altitude en temps réel pour maintenir une AGL constante au-dessus d’un terrain variable. Cela préserve le recouvrement et la GSD planifiés sur toute la zone de levé. Le suivi de terrain est essentiel pour les levés en terrain vallonné ou montagneux. Sans cela, le recouvrement peut varier de 10 à 20 points de pourcentage entre les sommets et les vallées, entraînant des lacunes de couverture dans les zones basses.
Terrain urbain. Les bâtiments et autres structures créent un relief local spectaculaire qui affecte le recouvrement. Un bâtiment qui s’élève à 30 m au-dessus du terrain environnant réduit la distance effective caméra-toit de 30 m, ce qui peut réduire le recouvrement longitudinal réel au niveau du toit de 15 à 20 points de pourcentage par rapport à la valeur planifiée. Pour les levés urbains, le recouvrement doit être augmenté pour compenser — en commençant à 80-85 % de recouvrement longitudinal pour garantir une couverture adéquate au niveau du toit.
Effets de la forêt et de la canopée. Les canopées d’arbres denses créent une surface effective plus haute et plus irrégulière que l’élévation du sol. Les calculs de recouvrement basés sur l’élévation du sol sous-estimeront le recouvrement réel au niveau de la canopée. Pour les levés forestiers, la planification de mission doit utiliser la hauteur de canopée prévue plutôt que l’élévation du sol pour la référence AGL.
Ombres d’occultation. Les objets hauts créent des ombres d’occultation — des zones qui ne sont pas visibles dans l’imagerie car elles sont cachées derrière l’objet. Les ombres d’occultation sont les plus grandes dans l’imagerie nadir, où la zone cachée s’étend loin de l’objet. Un recouvrement plus élevé aide à atténuer les ombres d’occultation en garantissant que les zones occultées sont visibles depuis différentes positions de la caméra le long de la ligne de vol.
Vérification du recouvrement après vol
Après la capture de l’imagerie, le recouvrement doit être vérifié avant de quitter le site de levé pour garantir que les données sont adaptées au traitement. La vérification après vol détecte les problèmes tôt, avant que l’équipe de vol n’ait quitté la zone et que le coût d’un nouveau vol devienne prohibitif.
Méthodes de vérification sur site. La méthode la plus accessible consiste à examiner les empreintes au sol des images sur l’application de planification de mission immédiatement après le vol. La plupart des applications affichent la couverture au sol approximative de chaque image sous forme de rectangle superposé sur une carte. Les espaces entre les rectangles indiquent des lacunes de couverture. Les rectangles adjacents avec des zones de recouvrement très étroites indiquent un recouvrement marginal qui peut causer des problèmes de traitement. De nombreuses applications signalent également le recouvrement minimum, moyen et maximum atteint pendant la mission.
Vérification de la densité des positions de la caméra. Un comptage rapide des positions d’images par rapport à la zone de levé donne une vérification approximative du recouvrement. Une zone de 10 hectares à 100 m d’altitude avec 80/65 de recouvrement devrait produire environ 100 à 150 images. Si le compte est significativement inférieur, le recouvrement peut être insuffisant. Les applications de planification de mission fournissent généralement les nombres d’images attendus pendant la planification, et le nombre réel doit correspondre étroitement.
Rapports de qualité photogrammétrique. Après le début du traitement, le logiciel de photogrammétrie génère des rapports de qualité qui révèlent les problèmes de recouvrement. Les indicateurs clés comprennent :
Carte des positions de la caméra — montre la position estimée de chaque image après l’ajustement de faisceau. Des lacunes dans le motif des positions de la caméra indiquent des zones où les images n’ont pas pu s’aligner.
Nombre de points de liaison — le nombre de caractéristiques correspondantes par paire d’images. Des valeurs inférieures à 100 indiquent un recouvrement faible ou une texture pauvre.
Erreur de reprojection — erreur pixel moyenne après l’ajustement de faisceau. Des valeurs supérieures à 1,0 pixel suggèrent des problèmes d’alignement.
Densité du nuage de points dense — les zones avec une densité de points anormalement faible indiquent souvent un recouvrement insuffisant.
Qualité de l’orthomosaïque — des coutures visibles, des images fantômes ou un flou aux limites des images indiquent des problèmes de recouvrement.
Planification de re-vol. Si la vérification révèle un recouvrement insuffisant, le levé doit être refait. La correction la plus simple consiste à augmenter les deux paramètres de recouvrement de 5 à 10 points de pourcentage. Pour les sites où le terrain ou les structures ont causé le problème, un vol en suivi de terrain ou une altitude de base plus élevée peut être nécessaire. Pour les surfaces à faible texture, l’ajout de cibles de contrôle au sol ou de marqueurs de texture artificiels peut améliorer l’appariement des caractéristiques.
Marges de sécurité. L’approche recommandée consiste à planifier avec des marges de sécurité : définir le recouvrement 5 % plus élevé que le minimum théorique pour l’application. Cela tient compte des effets du vent, de la dérive GPS, des variations de terrain et des inévitables écarts mineurs par rapport à la trajectoire de vol idéale qui se produisent dans les opérations réelles.
Résumé
Le recouvrement d’images — comprenant le recouvrement longitudinal (endlap / recouvrement le long de la trajectoire) et le recouvrement latéral (sidelap / recouvrement latéral / transversal) — est le paramètre d’acquisition fondamental qui détermine le succès ou l’échec d’un levé photogrammétrique. Un recouvrement longitudinal de 75-85 % garantit que chaque point au sol sur chaque ligne de vol apparaît dans plusieurs images séquentielles. Un recouvrement latéral de 60-75 % assure une couverture continue entre les lignes de vol adjacentes sans lacunes. Ensemble, ces paramètres créent la redondance géométrique dont les algorithmes de Structure par Mouvement ont besoin pour un appariement fiable des caractéristiques, la triangulation des positions de la caméra et la reconstruction 3D dense.
Un recouvrement insuffisant produit des lacunes de reconstruction, un échec d’alignement, une précision réduite et des zones de données manquantes — des problèmes qui ne peuvent pas être corrigés en post-traitement. Un recouvrement excessif augmente le temps de vol, le stockage et le temps de traitement de 3 à 5× sans gains de précision proportionnels. L’optimum pratique pour la plupart des applications se situe entre 75 et 85 % de recouvrement longitudinal et 60 à 75 % de recouvrement latéral, avec des valeurs plus élevées réservées aux surfaces à faible texture, aux structures complexes comme les ponts et aux exigences de précision sub-centimétrique.
L’inspection des chaussées et des pistes bénéficie d’un recouvrement plus élevé (80-85 % longitudinal, 70-75 % latéral) car les surfaces d’asphalte uniformes fournissent moins de points de liaison naturels. L’inspection des ponts nécessite des stratégies de recouvrement spécialisées pour différents éléments structurels : 80-85 % longitudinal pour les surfaces de tablier, 75-80 % pour les poutres et 80-90 % pour l’inspection à courte distance des appareils d’appui. La vérification après vol des empreintes d’images et des rapports de qualité de recouvrement garantit que les problèmes sont identifiés avant que l’équipe de levé ne quitte le site, évitant ainsi une remobilisation coûteuse.
Questions Fréquemment Posées
Le recouvrement d'images en photogrammétrie est le pourcentage de surface partagée entre deux ou plusieurs photographies aériennes. Il s'exprime par deux paramètres : le recouvrement longitudinal (endlap) — le recouvrement entre images consécutives le long de la direction de vol, et le recouvrement latéral (sidelap) — le recouvrement entre images de lignes de vol adjacentes. Pour une reconstruction 3D fiable, un recouvrement longitudinal de 75 à 85 % et un recouvrement latéral de 60 à 70 % sont la norme. Chaque point au sol doit apparaître dans au moins trois images pour une triangulation précise.
Le recouvrement longitudinal (endlap/recouvrement le long de la trajectoire) est le pourcentage de recouvrement entre deux images consécutives capturées le long de la même ligne de vol. Il est généralement fixé entre 75 et 85 % pour la photogrammétrie. Le recouvrement latéral (sidelap/recouvrement latéral/transversal) est le recouvrement entre des images de lignes de vol adjacentes dans une mission en grille, généralement fixé entre 60 et 70 %. Le recouvrement longitudinal garantit que chaque point le long de la trajectoire de vol apparaît dans plusieurs images séquentielles, tandis que le recouvrement latéral assure une couverture sur toute la largeur de la zone de levé sans lacunes entre les bandes de vol.
Le recouvrement d'images recommandé pour la cartographie photogrammétrique par drone est de 75 à 85 % de recouvrement longitudinal (endlap) et de 60 à 75 % de recouvrement latéral (sidelap). Pour les terrains complexes, les zones urbaines avec de grands bâtiments ou la modélisation 3D de haute précision, augmentez le recouvrement longitudinal à 85-90 % et le recouvrement latéral à 70-80 %. Pour les terrains plats simples et la production d'orthomosaïques de base, des minimums de 60 % longitudinal et 30 % latéral peuvent suffire, bien que cela risque des échecs de reconstruction.
Un recouvrement d'images insuffisant provoque des lacunes dans la couverture du nuage de points, des échecs d'appariement des points de liaison, une précision réduite du modèle et des zones où le logiciel de photogrammétrie ne peut pas reconstruire la géométrie 3D. Sur les surfaces planes ou à faible texture comme les chaussées, un faible recouvrement produit des bords flous et des trous dans l'orthomosaïque. En dessous de 60 % de recouvrement longitudinal, le risque d'échec complet de la reconstruction augmente considérablement, en particulier sur les surfaces uniformes avec peu d'éléments distinctifs.
Un recouvrement excessif (au-dessus de 90 % longitudinal ou 80 % latéral) augmente le temps de vol, le nombre d'images, la consommation de batterie, le temps de traitement et les besoins de stockage sans gains proportionnels en précision. Le traitement d'un levé avec 95 % de recouvrement au lieu de 80 % peut augmenter le temps de traitement de 300 à 500 % avec moins de 5 % d'amélioration de la précision. Les images supplémentaires introduisent des données redondantes qui ralentissent chaque étape du pipeline photogrammétrique sans bénéfice significatif.
Le recouvrement longitudinal minimum absolu pour la photogrammétrie est de 60 %, bien que la plupart des logiciels de photogrammétrie nécessitent au moins 70 % pour un traitement fiable. En dessous de 60 %, l'appariement des points de liaison devient peu fiable et le logiciel ne peut pas trianguler correctement les positions de la caméra. Le recouvrement latéral minimum est de 30 %, bien que 60 % soit fortement recommandé. Ces minimums varient selon la texture de la surface — les surfaces texturées ou à motifs peuvent fonctionner avec des recouvrements plus faibles, tandis que les surfaces uniformes comme l'asphalte nécessitent des recouvrements plus élevés.
Le pourcentage de recouvrement d'images est calculé en fonction de la couverture au sol de chaque image, qui augmente avec l'altitude. Cependant, le logiciel de planification de mission calcule le recouvrement en fonction de la hauteur au-dessus du niveau du sol (AGL). Lors d'un vol au-dessus d'un terrain avec une élévation variable ou des structures hautes, le recouvrement réel au niveau du sol peut être nettement inférieur à celui prévu. Par exemple, un vol planifié à 100 m AGL avec 75 % de recouvrement aura un recouvrement réel moindre au-dessus d'un bâtiment de 30 m de haut car la distance caméra-bâtiment n'est que de 70 m.
Le pourcentage de recouvrement d'images est calculé comme suit : Recouvrement (%) = (1 - (distance entre les centres d'image / dimension de l'empreinte au sol de l'image)) × 100. Pour le recouvrement longitudinal, la dimension utilisée est l'empreinte au sol de l'image dans la direction du vol. Pour le recouvrement latéral, c'est l'empreinte au sol de l'image perpendiculairement à la direction du vol. En pratique, le logiciel de planification de mission automatise ce calcul. L'intervalle de déclenchement de la caméra et la vitesse de vol sont définis pour atteindre le recouvrement longitudinal souhaité, tandis que l'espacement entre les lignes de vol définit le recouvrement latéral.
L'inspection des ponts par drone nécessite un recouvrement plus élevé que la cartographie standard en raison de la géométrie complexe et de la nécessité de détecter les petits défauts comme les fissures. Le recouvrement recommandé pour la photogrammétrie des ponts est de 80 à 85 % longitudinal et de 70 à 80 % latéral pour la surface du tablier. Pour les éléments verticaux (poutres, culées, piliers), des vols orbitaux obliques avec 70 à 80 % de recouvrement sont utilisés. Les recherches de la Federal Highway Administration montrent que 80 % de recouvrement longitudinal avec 70 % de recouvrement latéral produisent des modèles 3D complets de ponts adaptés à la détection de fissures jusqu'à 0,3 mm de largeur.
La vérification du recouvrement après vol peut être effectuée en inspectant les empreintes au sol des images dans le logiciel de planification de mission (DroneDeploy, Pix4Dcapture, UGCS) ou en consultant le rapport de qualité photogrammétrique après traitement. La plupart des logiciels de photogrammétrie (Agisoft Metashape, Pix4Dmapper, DJI Terra) génèrent un rapport de qualité montrant les positions de la caméra, la distribution des points de liaison et les zones de reconstruction faible. L'inspection visuelle de l'orthomosaïque à la recherche de coutures, d'images fantômes ou de lacunes révèle également des problèmes de recouvrement. Les signaux d'alarme incluent les zones avec moins de 3 images se chevauchant ou des erreurs de reprojection élevées.
Besoin d'une inspection aérienne professionnelle ?
TarmacView propose des services experts de photogrammétrie par drone avec un recouvrement d'images optimisé pour l'inspection des chaussées, des infrastructures et des actifs aéroportuaires. Contactez-nous pour une proposition de levé personnalisée.
Glossaire de la topographie, des caractéristiques de surface et du levé altimétrique
Un glossaire complet pour la topographie, les caractéristiques de surface et le levé altimétrique, couvrant les concepts majeurs, outils et normes techniques is...
La précision latérale est la mesure de la précision avec laquelle un point est positionné perpendiculairement à la direction principale du mouvement ou de l'ali...
L'imagerie nadir est capturée avec la caméra pointant directement vers le bas, perpendiculairement au sol, produisant une distorsion de perspective minimale pou...
26 min de lecture
Surveying
Drone
+3
Consentement aux Cookies Nous utilisons des cookies pour améliorer votre expérience de navigation et analyser notre trafic. See our privacy policy.