Zénith
Le zénith est le point du ciel situé directement au-dessus d’un observateur, crucial en navigation, astronomie, topographie et aviation en tant que référence po...
6 min de lecture
Astronomy
Navigation
+3
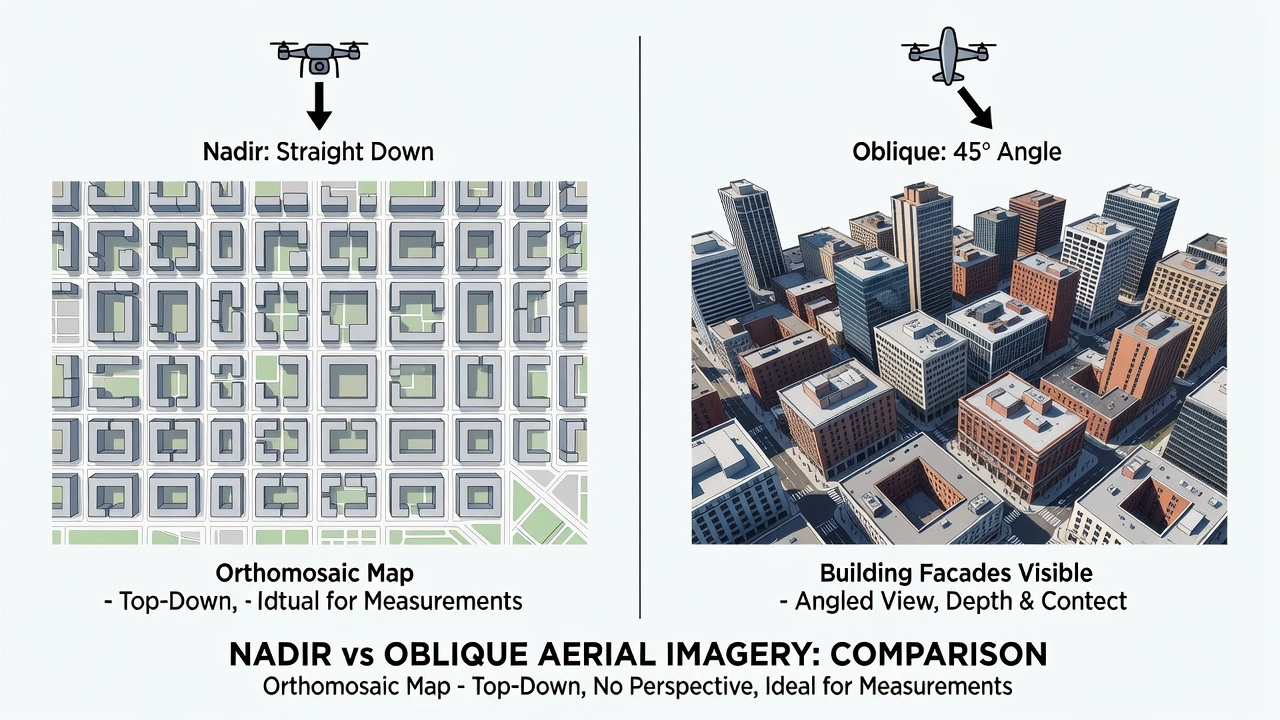
L’imagerie nadir est capturée avec la caméra pointant directement vers le bas, perpendiculairement au sol, produisant une distorsion de perspective minimale pour une génération précise d’orthomosaïques, de cartographie et de mesures. Il s’agit de l’orientation standard pour la photogrammétrie par drone et les levés aériens.
L’imagerie nadir est un type de photographie aérienne capturée avec l’axe de la caméra orienté à 90 degrés par rapport à la surface du sol — pointant directement vers le bas. Le terme nadir provient de l’astronomie, où il décrit le point de la sphère céleste situé directement sous un observateur, à l’opposé du zénith. En photographie aérienne, en télédétection par satellite et en photogrammétrie par drone, le point nadir est l’emplacement au sol qui se trouve verticalement sous le centre de perspective de l’objectif de la caméra.

Dans le contexte des levés aériens, l’orientation nadir produit des images avec le moins de distorsion de perspective et l’échelle la plus uniforme sur l’ensemble du cadre. Cette pureté géométrique fait de l’imagerie nadir l’orientation par défaut et standard pour la génération d’orthomosaïques, la cartographie planimétrique et les mesures quantitatives dans pratiquement tous les flux de travail de photogrammétrie par drone. Contrairement à l’imagerie oblique, où les pixels près du bas du cadre sont plus proches de la caméra que ceux du haut, les images nadir maintiennent une distance d’échantillonnage au sol (GSD) constante — la distance réelle représentée par chaque pixel — sur l’ensemble de la photographie.
Le dictionnaire SIG Esri définit le nadir comme « le point au sol verticalement sous le centre de perspective de l’objectif de la caméra ou des détecteurs du scanner, ou le point de convergence (point de fuite) pour tous les rayons verticaux dans une scène. » Cette définition comporte deux implications critiques pour les géomètres aériens.
Premièrement, le point nadir est le seul endroit dans une photographie aérienne qui est totalement exempt de déplacement de relief — le décalage apparent de la position d’un objet causé par les changements d’altitude du terrain. En s’éloignant du point nadir vers les bords du cadre, le déplacement de relief augmente proportionnellement. C’est pourquoi les images orientées nadir sont privilégiées pour la cartographie des terrains plats : elles minimisent les corrections géométriques nécessaires lors de l’orthorectification.
Deuxièmement, le nadir définit l’axe vertical du système de coordonnées de la caméra. En photogrammétrie, l’orientation interne de la caméra — distance focale, point principal, paramètres de distorsion de l’objectif — est calibrée par rapport à la direction nadir. Tout écart par rapport au vrai nadir (appelé basculement ou inclinaison) introduit des erreurs systématiques qui doivent être modélisées et supprimées lors du traitement photogrammétrique. Les nacelles de drones modernes peuvent maintenir l’orientation nadir à ±0,1° près dans des conditions stables, mais les rafales de vent et les manœuvres agressives peuvent provoquer une inclinaison qui dégrade la précision finale.
La relation entre le nadir et le GSD suit une simple loi en carré inverse : GSD = (altitude de vol × taille du pixel du capteur) / distance focale. Pour une caméra donnée, doubler l’altitude de vol double le GSD, ce qui signifie que chaque pixel couvre deux fois plus de distance au sol dans les deux dimensions, quadruplant ainsi la surface par pixel. L’imagerie nadir produit le GSD le plus prévisible car la longueur du trajet optique est la même sur l’ensemble du capteur — la distance caméra-sol est constante pour tous les pixels, contrairement à l’imagerie oblique où la longueur du trajet varie considérablement sur le cadre.
Lorsqu’une caméra est orientée en position nadir véritable, l’axe optique de l’objectif est perpendiculaire au plan du sol. Cela signifie que le plan image et le plan du sol sont parallèles entre eux. Dans cette configuration, la géométrie de l’image capturée suit un modèle de projection central simple où l’échelle est uniforme sur toute l’image, en supposant un terrain plat.
Le modèle mathématique pour la géométrie des images nadir est significativement plus simple que pour les images obliques. Dans une image nadir véritable, la transformation des coordonnées 3D du monde aux coordonnées 2D de l’image peut être approximée par une simple mise à l’échelle et translation, ne nécessitant que quatre paramètres. Les images obliques, en revanche, nécessitent une transformation projective complète avec huit paramètres ou plus, ainsi qu’une modélisation supplémentaire pour le GSD variable, le raccourcissement de perspective et les zones occluses.
Cette simplicité géométrique a des conséquences pratiques. Les images nadir se traitent plus rapidement dans les chaînes de traitement photogrammétriques car les algorithmes d’appariement de caractéristiques trouvent plus facilement les points correspondants lorsque les variations d’échelle entre les images sont minimales. Le coût de calcul du traitement Structure from Motion (SfM) pour des ensembles de données uniquement nadir peut être de 30 à 50 % inférieur à celui d’ensembles de données avec un contenu oblique significatif, simplement parce que les contraintes géométriques sont plus serrées et que la solution converge plus rapidement.
L’imagerie nadir offre plusieurs avantages distincts qui la rendent indispensable pour les levés aériens et la cartographie.
Distorsion de perspective minimale. Dans une image nadir véritable, tous les éléments au sol apparaissent dans leur relation géométrique correcte, sans les effets de raccourcissement ou de trapèze courants dans la photographie oblique. Un toit de bâtiment rectangulaire apparaît rectangulaire en vue nadir, et non trapézoïdal comme il le serait en vue oblique. Cela rend l’imagerie nadir idéale pour mesurer directement les distances, les surfaces et les angles sur l’image.
Distance d’échantillonnage au sol uniforme. Chaque pixel d’une image nadir représente la même surface physique au sol, en supposant un terrain plat. Cette résolution uniforme signifie qu’une mesure de fissure prise près du centre de l’image a la même précision qu’une mesure prise près du bord de l’image. En imagerie oblique, la résolution peut varier d’un facteur 3 ou plus entre les bords proche et lointain d’une même photographie.
Optimal pour la génération d’orthomosaïques. Les orthomosaïques — images composites géométriquement corrigées et sans couture — reposent sur l’imagerie nadir comme entrée principale. Le processus d’orthorectification supprime les déplacements induits par le terrain et les effets d’inclinaison de la caméra pour produire une image cartographique précise où chaque pixel est positionné à son emplacement géographique réel. Les images nadir nécessitent une orthorectification minimale car elles se rapprochent déjà de la projection orthographique que les orthomosaïques visent à atteindre.
Motifs de recouvrement prévisibles. Lors d’une mission nadir en grille, le recouvrement entre images adjacentes suit un motif propre et prévisible déterminé uniquement par l’altitude de vol, la vitesse et l’intervalle de déclenchement de la caméra. Cette prévisibilité simplifie la planification de vol et garantit une couverture complète avec une redondance minimale. Les logiciels de planification de mission peuvent calculer les positions exactes de déclenchement de la caméra pour atteindre des pourcentages de recouvrement cibles avec une précision mathématique.
Supérieur pour la cartographie planimétrique. Les cartes planimétriques — cartes montrant uniquement les positions horizontales des éléments sans altitude — sont mieux produites à partir d’images nadir car la géométrie horizontale est déjà bien préservée. Les éléments tels que les marquages au sol, les limites de propriété, les regards et les emprises de bâtiments peuvent être numérisés directement à partir d’orthomosaïques nadir avec une grande précision de position.
Efficacité de couverture supérieure. Une mission de cartographie nadir couvre plus de surface par vol qu’une mission oblique à la même altitude car le champ de vision de la caméra se projette comme un rectangle au sol plutôt qu’un trapèze. Pour un drone typique volant à 120 m (400 pi) AGL avec un objectif équivalent 24 mm, une image nadir couvre environ 200 × 150 m de sol, tandis qu’une image oblique à 45° couvre une surface totale plus grande mais avec une résolution très variable et une occlusion significative derrière les objets hauts.
L’imagerie nadir est le fondement de la photogrammétrie par drone. Le flux de travail standard pour générer des orthomosaïques, des modèles numériques de surface (MNS) et des nuages de points 3D commence par l’acquisition d’images nadir volées selon un motif de grille systématique.
Les paramètres de planification de vol pour la photogrammétrie nadir sont bien établis. L’American Society for Photogrammetry and Remote Sensing (ASPRS) recommande un minimum de 60 % de recouvrement avant et 30 % de recouvrement latéral pour la génération d’orthomosaïques de base, bien que la plupart des praticiens utilisent 75-80 % de recouvrement avant et 60-70 % de recouvrement latéral pour les travaux de haute précision. Le recouvrement supplémentaire garantit que chaque point au sol apparaît dans au moins trois à cinq images, fournissant la redondance nécessaire pour un appariement fiable des points de liaison et un ajustement par faisceaux.
Distance d’échantillonnage au sol et altitude. La relation entre l’altitude de vol et le GSD est linéaire : GSD = (altitude × taille du pixel) / distance focale. Pour un DJI Mavic 3 Enterprise avec un capteur CMOS 4/3 pouce (taille de pixel 3,3 μm) et une distance focale équivalente 24 mm volant à 100 m AGL, le GSD est d’environ 1,3 cm/pixel. À cette résolution, des fissures de chaussée aussi étroites que 4 mm peuvent théoriquement être détectées, bien que les limites pratiques de détection soient généralement de 2 à 3 fois le GSD.
Suivi de terrain. Pour les sites présentant des variations d’altitude importantes, les modes de vol en suivi de terrain maintiennent une distance AGL constante, assurant un GSD cohérent sur toute la zone de relevé. Sans suivi de terrain, l’imagerie nadir capturée sur un terrain vallonné aura une résolution variable — résolution plus élevée sur les sommets où le drone est plus proche, résolution plus faible dans les vallées où il est plus éloigné. La plupart des drones de cartographie professionnels et des logiciels de vol prennent désormais en charge le suivi de terrain à l’aide de LiDAR embarqué, de modèles de terrain en temps réel ou de modèles numériques d’élévation préchargés.
Motifs multi-grilles. Pour les relevés de grandes surfaces, les missions nadir sont généralement volées selon un motif à double grille (quadrillage) : un passage avec des lignes de vol nord-sud, puis un second passage avec des lignes de vol est-ouest. Ce motif en quadrillage améliore la qualité de la reconstruction 3D en fournissant des angles de vue orthogonaux pour chaque point au sol, même si la caméra reste en orientation nadir. Le motif en quadrillage est particulièrement important pour les sites présentant des caractéristiques topographiques subtiles qui pourraient être mal reconstruites à partir d’une seule direction de vol.
Géoréférencement. Les images nadir doivent être géoréférencées pour produire des produits cartographiques utilisables. Le géoréférencement direct utilise le GPS/IMU embarqué du drone pour étiqueter chaque image avec une position et une orientation approximatives. Pour une précision de niveau topographique, des points de contrôle au sol (GCP) sont placés à des emplacements relevés sur le site et visibles dans l’imagerie. Les corrections RTK et PPK améliorent encore la précision du géoréférencement direct. Avec des drones équipés RTK, une précision de position absolue de 2 à 5 cm (horizontal) et 4 à 7 cm (vertical) peut être atteinte sans GCP. Avec des GCP bien répartis, des précisions de 1 à 2 cm sont couramment atteignables.
Comprendre les différences entre l’imagerie nadir et oblique est essentiel pour choisir la stratégie de capture appropriée pour un projet donné.
| Paramètre | Imagerie Nadir | Imagerie Oblique |
|---|---|---|
| Angle de la caméra | 90° (directement vers le bas) | 30°-60° par rapport à la verticale |
| Distorsion de perspective | Minimale, échelle uniforme | Significative, échelle variable |
| Cohérence du GSD | Uniforme sur le cadre | Variable (3:1 ou plus) |
| Aptitude à l’orthomosaïque | Excellente (entrée principale) | Faible (auxiliaire uniquement) |
| Complétude du modèle 3D | Faible (murs, toits uniquement) | Complète avec façades |
| Efficacité de couverture | Élevée (par vol) | Plus faible (plus de passages) |
| Temps de traitement | Plus rapide (géométrie simple) | Plus lent (plus complexe) |
| Précision des mesures | Supérieure pour l’horizontal | Supérieure pour les surfaces verticales |
| Meilleur pour | Cartes, orthomosaïques, mesures de surface | Modèles 3D, inspection de façades |
L’imagerie nadir excelle dans la capture des surfaces horizontales — toits, chaussées, terrains, champs agricoles. Elle produit des cartes propres et géométriquement précises qui peuvent être utilisées directement pour la mesure et l’analyse. L’imagerie oblique, en revanche, capture les surfaces verticales que l’imagerie nadir ne peut pas voir : façades de bâtiments, culées de ponts, murs de soutènement et parois rocheuses.
Le choix entre nadir et oblique n’est pas binaire. La plupart des projets de levés aériens professionnels utilisent les deux. Un profil de mission typique comprend un passage en grille nadir pour l’orthomosaïque et la géométrie horizontale, suivi de quatre passages obliques (nord, sud, est, ouest) à 45° pour les détails des façades. Certains systèmes de capture haut de gamme utilisent des réseaux de cinq caméras qui capturent une image nadir et quatre images obliques simultanément, éliminant ainsi le besoin de multiples passages de vol.
L’imagerie nadir est l’orientation de capture privilégiée pour l’inspection des chaussées par drone. La perspective verticale est idéalement adaptée pour documenter l’état de surface des chaussées car les cibles d’inspection — fissures, orniérage, désenrobage, nids-de-poule, défauts de surface — sont toutes des caractéristiques visibles sur la surface horizontale de la chaussée.
Évaluation de l’indice de condition des chaussées (PCI). La méthodologie standard pour l’évaluation de l’état des chaussées, ASTM D5340, repose sur l’inspection visuelle des types de dégradations de surface, des niveaux de sévérité et de l’étendue. L’imagerie nadir par drone fournit un enregistrement visuel complet et permanent de la surface de la chaussée qui peut être analysé systématiquement pour le calcul du PCI. Les orthomosaïques haute résolution générées à partir d’images nadir permettent aux inspecteurs d’identifier et de classifier les dégradations sur l’ensemble des réseaux de chaussées sans avoir à parcourir le site.
Détection et mesure des fissures. L’imagerie nadir à GSD subcentimétrique (0,5-1,0 cm/pixel) permet la détection automatisée des fissures à l’aide d’algorithmes de vision par ordinateur. Les fissures longitudinales, les fissures transversales, le faïençage et les fissures en blocs sont tous visibles dans l’imagerie nadir haute résolution. Des largeurs de fissures aussi fines que 2-3 mm peuvent être mesurées à partir d’orthomosaïques avec un GSD approprié et une qualité d’image nette. Les systèmes modernes de détection de fissures basés sur l’apprentissage profond atteignent des taux de détection de 90 à 95 % sur l’imagerie nadir de chaussées avec des taux de faux positifs inférieurs à 5 %.
Détection de FOD sur pistes. Les débris d’objets étrangers (FOD) sur les pistes d’aéroport représentent un risque sérieux pour la sécurité. L’imagerie nadir par drone capturée lors des inspections de routine des pistes peut détecter des éléments FOD aussi petits que 2 cm de diamètre lorsqu’elle est volée à des altitudes appropriées. Plusieurs grands aéroports dans le monde utilisent désormais l’inspection nadir par drone dans le cadre de leurs programmes de gestion des FOD, en complément ou en remplacement des patrouilles FOD traditionnelles basées sur des véhicules.

Conformité à l’Annexe 14 de l’OACI. L’Annexe 14 de l’Organisation de l’aviation civile internationale (OACI) — Aérodromes spécifie les exigences de surveillance de l’état des surfaces pour les aéroports. Bien que l’OACI n’impose pas de technologies d’inspection spécifiques, l’annexe exige que les conditions de surface des pistes soient régulièrement évaluées et rapportées. L’imagerie nadir par drone fournit des données mesurables et vérifiables qui satisfont à ces exigences réglementaires tout en réduisant les temps de fermeture des pistes par rapport aux méthodes d’inspection visuelle traditionnelles. La Circulaire consultative 150/5200-18C de la FAA soutient également l’utilisation de technologies avancées, y compris l’inspection par drone, pour la gestion des chaussées aéroportuaires.
Malgré ses nombreux avantages, l’imagerie nadir présente des limitations significatives que les géomètres et les inspecteurs doivent comprendre.
Invisibilité des surfaces verticales. La limitation la plus fondamentale de l’imagerie nadir est qu’elle ne peut pas capturer les surfaces verticales. Les façades des bâtiments, les côtés des ponts, les parois des tunnels, les faces des barrages et les murs de soutènement sont soit complètement invisibles, soit n’apparaissent que comme d’étroites lamelles dans les images nadir. Pour l’inspection des infrastructures, cela signifie qu’une inspection uniquement nadir manque des éléments structurels critiques. Les poutres de pont, les appareils d’appui, les murs de culée et les colonnes de pile ne sont pas visibles depuis la perspective nadir.
L’effet de « fusion des bâtiments ». Lorsque l’imagerie nadir seule est utilisée pour la génération de modèles 3D, les structures verticales présentent ce que les photogrammètres appellent l’effet de « fusion des bâtiments » — des murs déformés, mal texturés ou fusionnés à leurs bases. Cela se produit car le logiciel de photogrammétrie dispose d’informations géométriques insuffisantes pour reconstruire les surfaces verticales à partir de données uniquement nadir. Le modèle capture le toit avec précision mais n’a pas de points de données sur les murs, forçant l’algorithme à interpoler entre les bords du toit et les éléments au niveau du sol.
Occlusion et contre-dépouilles. L’imagerie nadir ne peut pas voir sous les surplombs, derrière les structures surélevées ou dans les zones encaissées. Les grands surplombs de toit, les passages couverts, les dessous de ponts et les entrées de tunnels sont tous invisibles depuis la perspective nadir. Pour ces zones, des orientations obliques ou horizontales de la caméra sont essentielles.
Précision réduite sur les terrains escarpés. Sur les pentes raides, l’avantage du GSD uniforme de l’imagerie nadir diminue. Le GSD effectif sur une surface en pente est le produit du GSD nominal et de la sécante de l’angle de la pente. Une pente de 30° augmente le GSD effectif de 15 %, tandis qu’une pente de 45° le double. Le vol en suivi de terrain aide mais ne compense pas entièrement cet effet.
Limitations des ombres. L’imagerie nadir capturée sous des angles solaires bas souffre de longues ombres projetées par les arbres, les bâtiments et les éléments du terrain. Ces ombres obscurcissent les surfaces de chaussée et peuvent cacher des défauts ou des éléments d’intérêt. Voler pendant les heures de midi (10 h 00 à 14 h 00) minimise les problèmes d’ombre, et les conditions nuageuses fournissent un éclairage diffus idéal qui élimine complètement les ombres.
Lorsque la cible d’inspection comprend des surfaces verticales — façades de bâtiments, côtés de ponts, murs de soutènement — l’imagerie oblique devient nécessaire. L’imagerie aérienne oblique est capturée avec la caméra inclinée à un angle, généralement entre 30° et 60° par rapport à l’axe vertical. Cette perspective révèle les côtés des structures que l’imagerie nadir ne peut pas voir.
Inspection des façades de bâtiments. Pour les inspections de façades de bâtiments dans le cadre de programmes tels que le Facade Inspection Safety Program (FISP) de New York, l’imagerie oblique par drone offre une alternative rentable aux inspections traditionnelles par nacelle suspendue. L’imagerie oblique capture l’état des murs, les joints d’étanchéité des fenêtres, les fissures de maçonnerie, la corrosion et autres défauts de façade avec une résolution suffisante pour l’évaluation de l’état. Une mission d’inspection de façade typique capture des images obliques depuis quatre directions cardinales pour garantir que les quatre côtés du bâtiment soient documentés.
Inspection des ponts et des infrastructures. L’inspection des ponts nécessite la couverture de tous les éléments structurels : surface du tablier, poutres, appareils d’appui, culées, piles et dalles de transition. L’imagerie nadir capture la surface du tablier, mais les éléments restants nécessitent des angles de caméra obliques, voire horizontaux. Les protocoles d’inspection des ponts par drone développés par la Federal Highway Administration (FHWA) et les services de transport des États spécifient des plans de capture multi-angles qui incluent des relevés nadir du tablier, des relevés obliques des poutres et des relevés horizontaux des appareils d’appui.
Le motif orbital oblique. Pour l’inspection de structures individuelles, un motif de vol orbital avec un angle de caméra oblique est plus efficace que les missions nadir en grille. Le drone vole sur une trajectoire circulaire autour de la structure, maintenant une distance et une altitude constantes tandis que la caméra pointe vers l’intérieur à un angle oblique fixe. Ce motif orbital garantit que chaque surface verticale est capturée depuis plusieurs angles latéraux, fournissant une couverture complète pour la reconstruction 3D.
Les ensembles de données de levés aériens les plus complets sont produits en combinant des captures nadir et obliques dans un seul plan de vol. La composante nadir fournit la géométrie horizontale précise et l’orthomosaïque, tandis que la composante oblique ajoute les détails verticaux nécessaires à une reconstruction 3D complète.
La mission standard en cinq passages. L’approche standard de l’industrie pour les levés aériens complets des structures implique cinq passages de vol distincts :
Cette capture en cinq directions garantit que chaque surface de bâtiment est photographiée depuis au moins deux positions de caméra différentes, fournissant les contraintes géométriques nécessaires à une reconstruction 3D complète. Chaque passage oblique utilise généralement un recouvrement plus faible (60-70 %) que le passage nadir car l’objectif principal est la diversité géométrique plutôt que la redondance au niveau du pixel.
Traitement des ensembles de données combinés. Les logiciels de photogrammétrie traitent les images nadir et obliques ensemble dans un seul ajustement par faisceaux. Les images nadir fournissent le cadre de référence horizontal stable, tandis que les images obliques apportent les contraintes verticales qui résolvent la géométrie 3D complète. Les chaînes SfM modernes comme Pix4Dmapper, Agisoft Metashape et DJI Terra gèrent automatiquement les ensembles de données mixtes nadir-obliques, identifiant et appariant les points de liaison entre les deux types d’images.
Considérations sur le temps de vol. L’ajout de passages obliques double approximativement le temps de vol total par rapport à une mission uniquement nadir. Pour un site de 20 hectares (50 acres), une mission uniquement nadir à 100 m d’altitude avec 75 % de recouvrement prend environ 25 à 30 minutes de vol. L’ajout des quatre passages obliques augmente le temps de vol total à 55-70 minutes, nécessitant soit plusieurs batteries, soit un drone avec une endurance prolongée. Le compromis entre le temps de vol et la complétude du modèle doit être évalué pour chaque projet.
La précision de position des produits cartographiques dérivés du nadir est régie par des normes établies de l’ASPRS, du Federal Geographic Data Committee (FGDC) et des National Map Accuracy Standards (NMAS).
Normes de précision de position ASPRS. Les normes ASPRS de précision de position pour les données géospatiales numériques (2015) classent les ortho-images et autres données géospatiales numériques en classes de précision basées sur l’erreur quadratique moyenne (RMSE) évaluée par rapport à des points de contrôle indépendants. Pour les ortho-images dérivées d’imagerie nadir, la norme spécifie que la RMSE doit être calculée dans les deux dimensions horizontales (X et Y) et rapportée au niveau de confiance de 95 % (RMSE × 1,7308 pour des erreurs normalement distribuées).
| Classe ASPRS | RMSE (cm) | GSD (cm) | Altitude de vol typique (m) |
|---|---|---|---|
| Classe I | 2,5 | 1,0 | 80 |
| Classe II | 5,0 | 2,0 | 160 |
| Classe III | 10,0 | 4,0 | 320 |
| Classe IV | 20,0 | 8,0 | 640 |
Facteurs affectant la précision. La précision ultime des produits cartographiques dérivés du nadir dépend de plusieurs facteurs interconnectés :
Calibration de la caméra — Une connaissance précise de la distance focale, du point principal et des paramètres de distorsion de l’objectif est essentielle pour une reconstruction photogrammétrique non biaisée. Les caméras non calibrées ou mal calibrées introduisent des erreurs systématiques qui ne peuvent pas être supprimées lors du traitement.
Qualité d’image — Une mise au point nette, une exposition correcte, un faible bruit et un flou de mouvement minimal contribuent tous à un appariement précis des caractéristiques et à une triangulation précise. Les images floues ou bruyantes réduisent la précision des mesures des points de liaison et dégradent la précision finale.
Qualité du recouvrement — Un recouvrement cohérent et bien réparti garantit que tous les points au sol sont imagés depuis plusieurs perspectives. Les lacunes ou le recouvrement irrégulier laissent des zones avec des contraintes géométriques faibles et une précision réduite.
Distribution des GCP — Les points de contrôle au sol doivent être répartis uniformément sur la zone de relevé, y compris le périmètre, avec une densité plus élevée dans les zones de terrain complexe. Une mauvaise distribution des GCP permet à la solution photogrammétrique de dériver, particulièrement aux limites du relevé.
Positionnement GNSS — La précision de l’étiquette de position de la caméra affecte directement l’alignement initial et la précision absolue finale. Les positions corrigées par RTK (précision de 1-3 cm) produisent des résultats significativement meilleurs que le GPS autonome (précision de 2-5 m).
Complexité du terrain — Les pentes raides, les structures hautes et la végétation dense réduisent toutes la précision effective des modèles dérivés du nadir en introduisant des zones où la reconstruction géométrique est moins contrainte.
Validation et rapport de qualité. Les projets de cartographie nadir professionnels incluent une validation par rapport à des points de contrôle relevés indépendamment. La RMSE à ces points de contrôle est calculée et rapportée dans le cadre de la documentation de qualité du projet. La distribution spatiale des résidus est analysée pour détecter les tendances systématiques qui pourraient indiquer des erreurs de calibration de caméra non corrigées, des décalages de datum ou des artefacts de traitement.
L’obtention de résultats optimaux à partir de l’imagerie nadir nécessite une attention particulière à chaque phase du flux de travail de capture et de traitement.
Planification pré-vol. Avant toute mission de capture nadir, la zone de relevé doit être évaluée pour la complexité du terrain, les obstacles dangereux et les restrictions d’accès. L’altitude de vol est choisie en fonction du GSD requis — plus l’altitude est basse, plus la résolution est élevée, mais plus le temps de vol est long. Une règle empirique pratique consiste à sélectionner une altitude où le GSD souhaité est atteignable en un seul cycle de batterie pour la zone de relevé. Pour les grandes zones, les missions doivent être segmentées en plusieurs vols.
Réglages de la caméra. Utilisez le mode d’exposition manuel pour éviter que la caméra n’ajuste l’exposition entre les images, ce qui provoquerait des variations de luminosité dans l’orthomosaïque finale. Réglez la vitesse d’obturation à au moins 1/1000 s pour éliminer le flou de mouvement dû aux vibrations du drone et au mouvement vers l’avant. Utilisez l’ISO le plus bas (100-400) qui permet une exposition correcte, minimisant le bruit qui dégrade l’appariement des caractéristiques. L’ouverture doit être réglée entre f/4 et f/8 — suffisamment large pour éviter le flou de diffraction mais assez étroite pour une profondeur de champ adéquate. Réglez la mise au point sur manuel à l’infini pour empêcher l’autofocus de chercher entre les images.
Optimisation du recouvrement. Le recouvrement minimum pour une génération fiable d’orthomosaïques est de 60 % en avant et 30 % latéralement, mais 80 % en avant et 70 % latéralement sont recommandés pour les travaux de haute précision. Le recouvrement supplémentaire fournit une redondance pour le contrôle qualité et garantit une couverture complète même avec une dérive GPS mineure ou des écarts de trajectoire de vol induits par le vent. Pour les sites avec des structures hautes, le recouvrement doit être encore augmenté pour garantir que le sommet des structures soit capturé dans plusieurs images.
Conditions d’éclairage. Volez pendant les heures de midi (10 h à 14 h) lorsque le soleil est au plus haut pour minimiser les ombres. Les conditions nuageuses avec des stratus fournissent un éclairage diffus idéal qui élimine complètement les ombres tout en maintenant un éclairage adéquat. Évitez de voler en plein soleil avec de longues ombres (tôt le matin, tard l’après-midi) car les zones ombragées peuvent être sous-exposées et perdre des détails. Évitez la pluie, le brouillard et l’humidité élevée qui dégradent le contraste des images.
Connaissance du terrain. Pour les sites présentant des variations d’altitude importantes, utilisez le mode de vol en suivi de terrain si disponible. Cela maintient une altitude constante au-dessus du niveau du sol, assurant un GSD cohérent sur tout le relevé. Sans suivi de terrain, la résolution variera selon le rapport entre l’altitude la plus élevée et la plus basse du terrain dans la zone de relevé.
Placement des GCP. Répartissez les points de contrôle au sol uniformément sur la zone de relevé, y compris près du périmètre. Utilisez des cibles de 5 à 10 fois la taille du GSD pour une identification fiable dans l’imagerie. Placez les GCP sur des surfaces planes et stables, à l’écart des obstacles hauts qui pourraient projeter des ombres. Relevez les positions des GCP avec un équipement GNSS RTK pour une précision centimétrique.
Assurance qualité. Après la capture, inspectez les images pour vérifier la mise au point, l’exposition et le flou de mouvement avant de quitter le site. Vérifiez les lacunes dans la couverture en examinant les empreintes des images dans le logiciel de planification de mission. Capturez au moins 10 % d’images supplémentaires aux limites du relevé pour garantir une couverture de bord à bord après les corrections géométriques.
Intégrité des métadonnées. Vérifiez que les données EXIF des images contiennent des coordonnées GPS précises, l’altitude, le modèle de caméra et les paramètres de l’objectif. Des métadonnées corrompues ou manquantes peuvent empêcher un géoréférencement correct et peuvent nécessiter une correction manuelle lors du traitement. Les étiquettes de position corrigées par RTK doivent être vérifiées par rapport à des repères de relevé connus lorsque disponibles.
L’imagerie nadir trouve des applications dans un large éventail de secteurs et de cas d’utilisation.
Agriculture. L’imagerie nadir multispectrale est la source de données standard pour l’agriculture de précision, utilisée pour générer des cartes d’indice de végétation par différence normalisée (NDVI), identifier le stress des cultures, estimer les rendements et guider l’application d’engrais à taux variable. La résolution uniforme de l’imagerie nadir garantit des mesures de santé des plantes cohérentes sur l’ensemble des champs.
Construction et terrassement. La surveillance de chantiers de construction repose sur l’imagerie nadir par drone pour produire des orthomosaïques quotidiennes ou hebdomadaires montrant l’avancement du chantier, les volumes des stocks et la précision du nivellement. Les calculs de volumes de déblai-remblai à partir de modèles numériques d’élévation dérivés du nadir atteignent des précisions de 1 à 3 % lorsqu’ils sont correctement géoréférencés.
Surveillance environnementale. La délimitation des zones humides, la surveillance de l’érosion côtière, la cartographie de la végétation et les évaluations d’impact environnemental utilisent toutes l’imagerie nadir comme source de données principale. Des plateformes comme GeoNadir fournissent des outils spécialisés pour l’évaluation des conditions environnementales utilisant l’imagerie nadir par drone et satellite.
Assurance et évaluation immobilière. Les compagnies d’assurance utilisent les orthomosaïques nadir pour mesurer les surfaces de toit, évaluer l’état des propriétés et documenter les dommages préexistants pour la gestion des sinistres. La capacité de mesurer directement à partir d’ortho-images géoréférencées élimine le besoin de visites physiques sur site pour de nombreuses tâches d’évaluation immobilière.
Intervention d’urgence. Les premiers intervenants utilisent des missions nadir par drone à déploiement rapide pour cartographier les scènes de catastrophe, les zones de recherche et les périmètres d’incidents. La capacité d’orthomosaïque en temps réel permet aux commandants d’intervention de voir l’étendue complète d’une scène depuis une seule vue zénithale, facilitant la prise de décision tactique.
Urbanisme. Les services municipaux d’urbanisme utilisent les ortho-images nadir comme fonds de carte pour l’analyse de zonage, l’évaluation foncière, la planification des infrastructures et le suivi du développement urbain. Les séries temporelles d’imagerie nadir permettent la détection des changements pour identifier les constructions non autorisées, suivre les schémas de développement et surveiller la conformité avec les réglementations d’urbanisme.
L’imagerie nadir — capturée avec la caméra pointant directement vers le bas, perpendiculairement au sol — est le type de données fondamental pour les levés aériens, la cartographie et la photogrammétrie. Sa géométrie uniforme, sa distorsion de perspective minimale et sa distance d’échantillonnage au sol constante en font le choix optimal pour la génération d’orthomosaïques, la cartographie planimétrique, les mesures de surface et l’inspection des chaussées. Les limitations de l’imagerie nadir — particulièrement son incapacité à capturer les surfaces verticales — sont bien comprises et peuvent être surmontées en la complétant par de l’imagerie oblique dans des plans de capture combinés. Les projets de levés aériens professionnels intègrent systématiquement des données nadir et obliques pour produire des produits géospatiaux complets, précis et utilisables dans les domaines des levés, de la construction, de l’inspection des infrastructures, de l’agriculture, de la surveillance environnementale et des interventions d’urgence.
TarmacView fournit des services d'inspection aérienne nadir et oblique pour les infrastructures de chaussée, les ouvrages et les actifs aéroportuaires. Contactez-nous pour un devis personnalisé.
Le zénith est le point du ciel situé directement au-dessus d’un observateur, crucial en navigation, astronomie, topographie et aviation en tant que référence po...
Un glossaire complet pour la topographie, les caractéristiques de surface et le levé altimétrique, couvrant les concepts majeurs, outils et normes techniques is...
L’orientation en topographie consiste à définir une direction de référence pour toutes les mesures, garantissant l’exactitude spatiale. Des notions telles que l...