Térbeli felbontás
A térbeli felbontás az a kulcsmutató, amely meghatározza a képalkotó rendszer képességét a finom részletek megkülönböztetésére; létfontosságú a légi közlekedés,...
9 perc olvasás
Aviation
Remote Sensing
+2
A képátfedés (előre irányuló átfedés és oldalirányú átfedés) az egymást követő és szomszédos fényképek közötti közös képterület százalékos aránya egy fotogrammetriai felmérésben. A tipikus követelmények 75-80% előre irányuló és 60-70% oldalirányú átfedés infrastruktúra-térképezés és -vizsgálat esetén.
Képátfedés a két vagy több egymást követő légifelvétel között megosztott teljes képterület százalékos aránya. Ez a legkritikusabb felvételi paraméter a fotogrammetriában, amely közvetlenül meghatározza, hogy az automatikus 3D rekonstrukció sikerül-e vagy sem. Megfelelő átfedés nélkül a Structure from Motion (SfM) algoritmusok nem találnak megbízható kötőpontokat a képek között, a kamerapozíciók nem háromszögelhetők, és az eredményül kapott pontfelhő vagy ortomoznik hézagokat, torzulásokat és mérési hibákat tartalmaz.
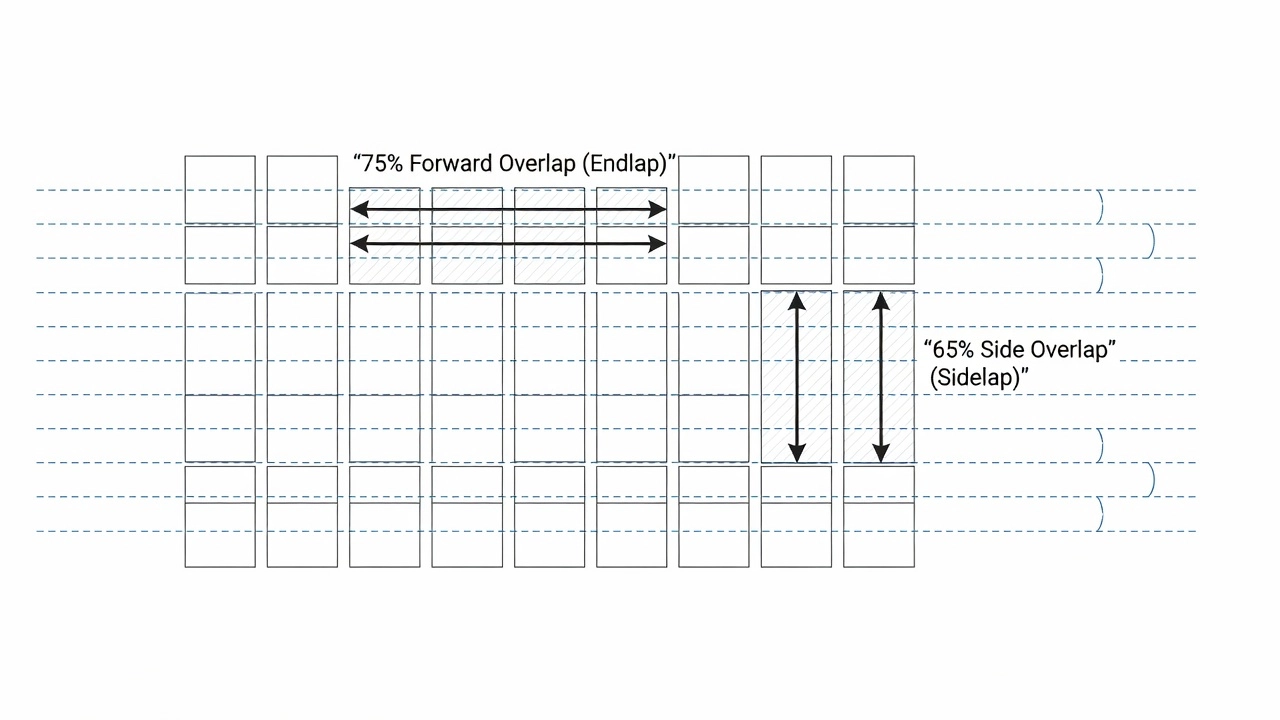
Az átfedést két független paraméterrel fejezik ki: előre irányuló átfedés (más néven endlap vagy nyomvonal menti átfedés), amely az egymást követő képek közötti átfedés a repülési irány mentén, és oldalirányú átfedés (más néven sidelap, laterális átfedés vagy keresztirányú átfedés), amely a szomszédos, egymás mellett repült repülési vonalak képei közötti átfedés. Mindkét paramétert függetlenül kell beállítani a küldetéstervező szoftverben, és ezeket befolyásolja a repülési magasság, a kameraérzékelő geometriája, a talajsebesség és a kamera triggerelési időköze.
A képátfedés mögötti matematikai elv az a fotogrammetriai követelmény, hogy a talaj minden pontjának legalább két, és ideális esetben három vagy több képen is láthatónak kell lennie különböző kamerapozíciókból. Ez a többnézetű geometria teszi lehetővé az epipoláris vonal háromszögelését — az automatizált fotogrammetria magját —, ahol bármely pont 3D koordinátáit a megfelelő pixelhelyének megtalálásával számítják ki több átfedő képen, és megoldják a sugárvonalak metszéspontját az egyes kamerapozíciókból az adott pixelen keresztül.
Előre irányuló átfedés az egymást követően, egyetlen repülési vonal mentén készített két fénykép között megosztott képterület százalékos aránya. A nyomvonal menti képméret (a kép lábnyomának mérete a repülési irányban) százalékában fejezik ki. Ha az egymást követő képek nyomvonal menti területük 80%-át osztják meg, az előre irányuló átfedés 80%.
Az előre irányuló átfedés határozza meg, hogy a repülési útvonal mentén egy adott talajpont hányszor kerül leképzésre. 80%-os előre irányuló átfedés mellett minden talajpont minden olyan képen megjelenik, amelynek pozíciója lefedi azt a pontot — jellemzően 5-7 képen egyetlen repülési vonal esetén. Ez a többszörösség elengedhetetlen a megbízható kötőpont-egyeztetéshez: az SfM feldolgozási láncnak legalább három megfigyelésre van szüksége minden kötőpontról a kamerapozíció és -tájolás pontos meghatározásához, és a további megfigyelések javítják a pontosságot meghatározó redundanciát.
Az előre irányuló átfedést a hagyományos légifotogrammetriai szakirodalom endlap néven is említi. Az “endlap” kifejezés az analóg légifilmes kamerák korszakából származik, amelyeket pilóta által vezetett repülőgépekre szereltek, ahol egyetlen repülési futam filmcsíkját fizikailag egymás végéhez illesztették a sztereoszkópikus megtekintéshez. A kifejezés a modern digitális fotogrammetriában is fennmaradt, bár az “előre irányuló átfedés” és a “nyomvonal menti átfedés” kifejezőbb a drónos műveletek esetében.
Az előre irányuló átfedés számítása három paramétertől függ: a kép talajlábnyomának mérete a repülési irányban, a repülési sebesség a talajhoz képest, és a kamera triggerelési időköze. Bármely adott kép lábnyom esetén (amelyet a repülési magasság és a kamera látómezeje határoz meg) a kívánt előre irányuló átfedés határozza meg az egymást követő kamerapozíciók közötti maximális megengedett távolságot:
D_max = L × (1 — O_f / 100)
Ahol D_max az egymást követő expozíciós állomások közötti maximális távolság, L a kép lábnyomának hossza a repülési irány mentén, és O_f a kívánt előre irányuló átfedés százalékos aránya. Egy 100 m nyomvonal menti kép lábnyom és 80%-os kívánt előre irányuló átfedés esetén a kamerának minden 20 m előrehaladás után kell exponálnia.
Oldalirányú átfedés a szomszédos repülési vonalak képei között megosztott képterület százalékos aránya. A keresztirányú képméret (a kép lábnyomának mérete a repülési irányra merőlegesen) százalékában fejezik ki. Ha két szomszédos repülési vonal képei laterális területük 65%-át osztják meg, az oldalirányú átfedés 65%.
Az oldalirányú átfedést sidelap, laterális átfedés vagy keresztirányú átfedés néven is ismerik. A hagyományos fotogrammetriában a sidelap a szomszédos filmcsíkok közötti átfedés volt egy térképezési blokkban. Drónos műveletekben az oldalirányú átfedés két párhuzamos repülési vonal közötti átfedés egy rácsos küldetésben.
Az oldalirányú átfedés határozza meg, hogy vannak-e fedési hézagok a szomszédos repülési vonalak között. 60%-os oldalirányú átfedés mellett az egyik repülési vonal effektív fedésének szélei 60%-ban átfednek a következő vonaléval a keresztirányú képméret tekintetében, biztosítva a folyamatos fedést a felmérési terület teljes szélességében. 30%-os oldalirányú átfedés alatt a repülési vonalak közötti fedés megszakad, tényleges hézagokat létrehozva a felvételekben, ahol nincs adat.
A repülési vonalak közötti távolságot az oldalirányú átfedés követelménye alapján számítják ki:
S = W × (1 — O_s / 100)
Ahol S a szomszédos repülési vonalak közötti távolság, W a kép lábnyomának szélessége a repülési irányra merőlegesen, és O_s a kívánt oldalirányú átfedés százalékos aránya. Egy 150 m keresztirányú kép lábnyom és 65%-os kívánt oldalirányú átfedés esetén a repülési vonalakat 52,5 m távolságra kell elhelyezni.
| Paraméter | Előre irányuló átfedés (Endlap) | Oldalirányú átfedés (Sidelap) |
|---|---|---|
| Irány | Repülési útvonal mentén | Szomszédos repülési vonalak között |
| Tipikus érték | 75-85% | 60-75% |
| Minimum a megbízhatósághoz | 70% | 30% |
| Hatás a repülési időre | Magasabb átfedés = több kép repülési vonalanként | Magasabb átfedés = több repülési vonal |
| Elsődleges hatás | Fedést biztosít minden repülési sáv mentén | Fedést biztosít a felmérés szélességében |
| Kulcsváltozók | Repülési sebesség, triggerelési időköz, magasság | Repülési vonalak távolsága, magasság, érzékelő szélessége |
A Structure from Motion (SfM) a modern digitális fotogrammetriát működtető számítási motor. Az SfM algoritmusok átfedő 2D képeket dolgoznak fel, hogy egyidejűleg rekonstruálják a kamerapozíciókat, a kamera tájolásokat és a jelenet 3D geometriáját. A képátfedés az az alapvető előfeltétel, amely nélkül az SfM nem működhet.
Az SfM feldolgozási lánc jellemzőfelismeréssel kezdődik — az olyan algoritmusok, mint a SIFT (Scale-Invariant Feature Transform), a SURF (Speeded-Up Robust Features) vagy az AKAZE, jellegzetes pontokat azonosítanak minden képen, például sarkokat, éleket és textúrafoltokat. Ezeknek a jellemzőknek robusztusnak kell lenniük, ami azt jelenti, hogy megbízhatóan detektálhatók a megvilágítás változásaitól, a méretkülönbségektől és a képek közötti kis perspektívaeltolódásoktól függetlenül. E jellemzők sűrűsége és detektálhatósága a felület textúrájától függ — a fű, a kavics és az útburkolati jelek bőséges jellemzőket produkálnak, míg az egységes aszfalt, a hótakaró és a vízfelületek nagyon keveset.
A következő szakasz a jellemzőillesztés, ahol a szoftver megtalálja a megfelelő jellemzőket a kép párok között. Itt kritikus az átfedés: ha két kép nem fedi át egymást, nincs közös talajterületük, így nem lehet jellemzőket illeszteni közöttük. Még ha a képek át is fedik egymást, az illesztés sikerességi aránya az átfedés százalékától függ. Kutatások szerint az illesztési sikerességi arányok drámaian csökkennek 60%-os előre irányuló átfedés alatt. 80%-os átfedésnél a tipikus illesztési arányok szomszédos képek között 1000-5000 kötőpont/kép pár. 50%-os átfedésnél ez 100-500 kötőpontra csökken, 40% alatt pedig a megbízható illesztés gyakran teljesen meghiúsul.
A harmadik szakasz a kamera pozíciójának becslése kötegegyengetés (bundle adjustment) segítségével. A szoftver meghatározza minden kamera pozícióját (X, Y, Z) és tájolását (dőlés, billenés, elfordulás) az expozíció pillanatában, valamint minden egyeztetett kötőpont 3D koordinátáit. Ez egy nemlineáris legkisebb négyzetek optimalizációs probléma, és a megoldás minősége kritikusan két tényezőtől függ: attól, hogy hány képen jelenik meg az egyes kötőpontok, valamint e képek geometriai konfigurációjától.
A fotogrammetria ökölszabálya szerint minden talajpontnak legalább három képen kell szerepelnie a megbízható rekonstrukcióhoz. 80%-os előre irányuló és 65%-os oldalirányú átfedéssel egy rácsos felmérés központi részén minden pont 6-12 képen jelenik meg, erős geometriai korlátokat biztosítva. 60%-os előre irányuló és 40%-os oldalirányú átfedésre csökkentve ez pontonként 3-5 képre redukálódik, a felmérés határaihoz közeli pontok pedig csak 2-3 képen jelennek meg — ami a megbízhatóság minimális küszöbértéke.

Többnézetű sztereó (Multi-View Stereo, MVS) — az SfM-et követő sűrű illesztési szakasz — még érzékenyebb az átfedésre. Míg az SfM-nek csak ritka jellemzőket kell illesztenie, az MVS minden pixelre mélységbecslést próbál előállítani, létrehozva egy millió pontból álló sűrű pontfelhőt. Az MVS algoritmusok kis képfoltok fotometriai konzisztenciáját értékelik több nézőpontból, és e mélységbecslések minősége javul az átfedő nézetek számával. A csak 2-3 kamera által leképezett területek zajos, hiányos mélységtérképeket mutatnak, míg az 5+ kamera által leképezett területek tiszta, teljes rekonstrukciókat eredményeznek.
A drónos fotogrammetria standard átfedési követelményei évtizedek fotogrammetriai gyakorlatán keresztül alakultak ki, kiterjedt tudományos kutatások által validálva. Az alábbi értékek általános célú ajánlásokat képviselnek, amelyek a legtöbb felmérési forgatókönyvre alkalmazhatók.
Ortomoznik generáláshoz — egy zökkenőmentes, geometriailag korrigált légifelvétel-térkép előállításához — a minimális előre irányuló átfedés 60%, a minimális oldalirányú átfedés 30%. Ezek az abszolút alsó határok, amelyek alatt a fotogrammetriai szoftver nem képes folyamatos ortomoznikot előállítani látható varratok vagy hézagok nélkül. A legtöbb szakember azonban 75-85%-os előre irányuló és 60-70%-os oldalirányú átfedést ajánl professzionális minőségű ortomoznikokhoz. A magasabb értékek biztosítják a pontos ortorektifikációhoz szükséges redundanciát, amely a terepmagasság és a kameraperspektíva alapján korrigálja az egyes pixelek pozícióját.
3D pontfelhő generáláshoz — egy részletes, mérhető 3D modell előállításához a felületről — a követelmények szigorúbbak. A 75-85%-os előre irányuló és 60-75%-os oldalirányú átfedés a standard. A többlet átfedés biztosítja, hogy minden talajpont legalább 5-8 különböző kamerapozícióból legyen leképezve, megadva a sűrű illesztési szakaszban a pontos mélységbecsléshez szükséges geometriai változatosságot.
Nagy pontosságú földméréshez — ahol 1-3 cm (0,5-1 hüvelyk) mérési pontosság szükséges — 80-85%-os előre irányuló és 70-80%-os oldalirányú átfedés ajánlott. Ezeknél az átfedési szinteknél a fotogrammetriai hálózat elegendő redundanciával rendelkezik a GPS pozicionálási hibák, a szél által okozott kamera dőlés és más bizonytalansági források kompenzálásához. A Remote Sensing folyóiratban publikált tudományos kutatások következetesen azt mutatják, hogy az átfedés 70%-ról 80%-ra növelése 25-40%-kal javítja a függőleges pontosságot, míg a 85% fölé növelés csökkenő hozadékot mutat.
Infrastruktúra-vizsgálathoz — hídfedélzetek, burkolati felületek, futópálya állapotfelmérés — a 80-85%-os előre irányuló és 70-80%-os oldalirányú átfedés a standard. A magasabb átfedés biztosítja, hogy a kis felületi hibák (repedések, kagylósodások, hézagsérülések) több képen, több szögből láthatók legyenek, javítva a felismerési arányokat és a mérési pontosságot.
| Alkalmazás | Előre irányuló átfedés | Oldalirányú átfedés | Indoklás |
|---|---|---|---|
| Ortomoznik | 75-80% | 60-65% | Zökkenőmentes térkép előállítás |
| 3D modell (standard) | 75-80% | 60-70% | Teljes felület rekonstrukció |
| Nagy pontosságú felmérés | 80-85% | 70-80% | Centiméter alatti pontosság |
| Burkolatvizsgálat | 80-85% | 70-75% | Repedésdetektálás 0,3 mm-es pontossággal |
| Hídfedélzet vizsgálat | 80-85% | 70-80% | Szerkezeti hibák azonosítása |
| Városi térképezés | 85-90% | 70-80% | Épületrekonstrukció |
| Mezőgazdaság/NDVI | 70-75% | 55-65% | Hatékony területlefedés |
| Nagyléptékű térképezés | 70-75% | 55-60% | Egyensúly a fedés és repülési idő között |
Az ajánlott átfedési küszöbértékek alatti működés negatív hatások láncolatát váltja ki, amelyek rontják vagy megsemmisítik a fotogrammetriai eredményt.
Rekonstrukciós hézagok — a nem megfelelő átfedés legnyilvánvalóbb tünete. Ha két szomszédos kép nem oszt meg elegendő talajterületet, az SfM algoritmus nem talál kötőpontokat közöttük, és a terület rekonstrukciója teljesen meghiúsul. A végső pontfelhőben vagy ortomoznikban ezek a hézagok lyukakként vagy hiányzó adatként jelennek meg. Súlyos esetekben a képek teljes blokkja nem illeszthető egyetlen összefüggő modellé, hanem szétkapcsolódó klaszterekre töredezik.
Sikertelen kötőpont-egyeztetés — akkor fordul elő, ha két kép közötti átfedő terület túl kicsi ahhoz, hogy elegendő jellegzetességet tartalmazzon. Egységes felületeken, mint az aszfalt vagy a beton, még a 60%-os átfedés sem biztosít elegendő illesztési pontot, mert a felület textúrája hiányzik. Ilyen felületeken 80% vagy magasabb átfedésre lehet szükség a megbízható illesztéshez elegendő jellemző megtalálásához.
Csökkent pozicionális pontosság — még ha a rekonstrukció sikerül is marginális átfedési szinteken, az eredmény pontossága sérül. Minden mérés a pontfelhőből vagy ortomoznikból nagyobb bizonytalansággal jár. Tudományos kutatások kimutatják, hogy az előre irányuló átfedés 80%-ról 60%-ra csökkentése körülbelül 50%-kal növeli a pontfelhő zaját és 25-40%-kal csökkenti a vízszintes pontosságot.
Gyenge élminőség — a felmérési terület határainál a nem megfelelő átfedés az ortomoznik szélein látható torzulást, varratvonalakat és eltolódást okoz. A legkülső képekből hiányoznak a geometriai korlátokat biztosító szomszédos nézetek teljes készlete, ami érzékenyebbé teszi őket a pozicionálási hibákra.
Megnövekedett reprojekciós hiba — a kötegegyengetés megoldásában a reprojekciós hiba (a kötőpont vetített helye és a megfigyelt helye közötti átlagos távolság a képen) megnő. A magasabb reprojekciós hiba gyengébb megoldást jelez, kisebb belső konzisztenciával. Bár némi reprojekciós hiba elkerülhetetlen, a 0,5 pixel feletti értékek gyenge geometriai megoldást jeleznek.
Sikertelen mélységbecslés — a Multi-View Stereo szakasz legalább 3 átfedő nézetet (és lehetőleg 5+-ot) igényel minden pixelhez a megbízható mélységbecslés előállításához. Nem megfelelő átfedéssel a kép nagy területein a mélységbecslések zajosak, hiányosak vagy teljesen hiányoznak, lyukakat hozva létre a sűrű pontfelhőben.
Bár a több átfedés általában jobb, mint a kevesebb, a túlzott átfedés jelentős költségekkel jár, amelyeket egyensúlyba kell hozni a marginális pontosságnövekedéssel.
Megnövekedett repülési idő — a magasabb átfedés több képet jelent egységnyi területre vetítve, ami több repülési vonalat, több kamera triggerelést és hosszabb teljes küldetésidőt igényel. Az előre irányuló átfedés 75%-ról 90%-ra növelése nagyjából megduplázza a képek számát repülési vonalanként. Egy olyan küldetésnél, amely 75%-os átfedéssel 20 percet venne igénybe, 90%-os átfedéssel körülbelül 35-40 percre lenne szükség, ami potenciálisan egy további akkumulátort igényel.
Megnövekedett tárolási igények — több kép több tárhelyet fogyaszt a drón memóriakártyáján és a feldolgozó számítógépen. Egy felmérés, amely 500 képet produkál 75%-os átfedéssel, 1500 képet produkálhat 90%-os átfedéssel. 20 MB/kép (jellemzően egy 20 MP-es érzékelő esetén) mellett ez a különbség 10 GB és 30 GB tárhely között van.
Exponenciális feldolgozási idő növekedés — a fotogrammetriai feldolgozás számítási költsége nem lineárisan skálázódik a képek számával. Az SfM illesztési szakasz minden képet összehasonlít minden más képpel, amely átfedhet vele. 75%-os átfedésnél 500 képpel, szabályos rácsba rendezve, minden kép körülbelül 12-16 szomszéddal fed át, ami nagyjából 5000 kép párt eredményez az illesztéshez. 90%-os átfedésnél minden kép 30-40 szomszéddal fed át, 15 000-20 000 kép párt létrehozva. A feldolgozási idő a kép párok számával arányosan nő, így a 90%-os átfedésű felmérések feldolgozása 3-5x lassabb, mint a 75%-os átfedésűeké.
Adat előny nélkül — körülbelül 85%-os előre irányuló és 75%-os oldalirányú átfedés felett a további átfedés elhanyagolható javulást eredményez a rekonstrukció minőségében. Az SfM megoldás már jól korlátozott a meglévő képgeometria által, és a redundáns nézetek hozzáadása nem hoz új geometriai információt. A többletképek egyszerűen megduplázzák a meglévő megfigyeléseket, számítási terhet adva anélkül, hogy érdemi pontosságnövekedést eredményeznének.
| Átfedési szint | Kép egységnyi területen | Relatív feldolgozási idő | Pontosságnövekedés a 75/65 alapvonalhoz képest |
|---|---|---|---|
| 75%/65% | 1x (alapvonal) | 1x (alapvonal) | — |
| 80%/70% | 1,3x | 1,5x | +15-20% |
| 85%/75% | 2x | 3x | +25-35% |
| 90%/80% | 3,5x | 5x | +30-40% |
| 95%/85% | 8x | 15x | +32-42% |
Az adatok egyértelműen csökkenő hozadékot mutatnak: a 85%-ról 95%-os átfedésre való növelés pontosságnövekedése kevesebb mint 10%, miközben a számítási költség 5x-re nő. A gyakorlati optimum a legtöbb alkalmazás esetében 75-85%-os előre irányuló és 60-75%-os oldalirányú átfedésnél van.
A burkolatok drónos vizsgálata speciális átfedési szempontokat igényel a burkolati felületek egyedi jellemzői miatt: nagy, egységes területek alacsony textúrával, magas fényvisszaverő képességgel és a kis felületi hibák észlelésének szükségességével.
Az alacsony textúra kihívása. Az aszfalt- és betonburkolati felületek korlátozott vizuális textúrával rendelkeznek — hiányzik belőlük a fű, kavics, talaj és növényzet, amelyek bőséges kötőpontokat biztosítanak a természetes terepi felmérésekben. Az SfM algoritmus kevesebb jellemzőt tud illeszteni az átfedő képek között, ami megnehezíti a megbízható illesztést. A magasabb átfedés kompenzálja ezt azáltal, hogy több potenciális illesztési területet biztosít, növelve annak valószínűségét, hogy a csökkentett jellemzőkészlet is elegendő megfeleltetést talál.
Ajánlott átfedés burkolathoz. Burkolatvizsgálathoz 80-85%-os előre irányuló és 70-75%-os oldalirányú átfedés a standard. Ez a magasabb alapérték megbízható rekonstrukciót biztosít még a legegységesebb burkolati felületeken is. Egyes ügynökségek 85%-os előre irányuló átfedést írnak elő futópálya-vizsgálatokhoz, hogy a burkolati felület minden négyzetmétere legalább 7-9 képen szerepeljen.
Repedésdetektálási követelmények. A minimálisan detektálható repedésszélesség egy ortomoznikban körülbelül 2-3-szorosa a talajmintavételezési távolságnak (Ground Sample Distance, GSD). 1 cm-es GSD mellett (jellemző burkolatvizsgálatnál 60-80 m magasságban) a 2-3 mm széles repedések is feloldhatók. A pontos repedésszélesség-mérés azonban megköveteli, hogy a repedés több átfedő képen is látható legyen a pixelszintű zaj és perspektivikus hatások átlagolásához. A magasabb átfedés nagyobb mérési redundanciát biztosít és javítja a repedésszélesség-mérés pontosságát.
Burkolatállapot-index (PCI) felmérések. Az ASTM D5340 szabvány a Burkolatállapot-index értékeléséhez megköveteli, hogy a vizsgálók azonosítsák és számszerűsítsék a felületi hibák típusait, beleértve a repedezést, a nyomvályúsodást, a felületi szétesést, a foltozást és a kátyúkat. A magas átfedésű felvételeket használó drónalapú PCI felmérések 90-95%-os egyezést érhetnek el a talajszintű felmérésekkel a hibák azonosításában, lényegesen gyorsabb adatgyűjtéssel és teljes körű fotográfiai dokumentációval.
Idegen tárgyak (FOD) detektálása futópályákon. Az idegen tárgyak (Foreign Object Debris, FOD) detektálása repülőtéri futópályákon 5 mm vagy annál kisebb GSD-t és nagyon magas átfedést igényel a teljes lefedettség biztosításához. 85-90%-os előre irányuló és 75-80%-os oldalirányú átfedés jellemző a FOD felmérésekhez. Ezekkel a paraméterekkel egy szabványos futópálya-felmérés több száz képet igényel futópálya-kilométerenként. A magas átfedés biztosítja, hogy még a kis törmelékdarabok (anyák, csavarok, gumiabroncs-töredékek) is több képen rögzítésre kerüljenek, csökkentve a nem észlelt tárgyak valószínűségét.
A hidak drónos vizsgálata egyedi átfedési kihívásokat jelent az összetett 3D geometria miatt. Egy tipikus híd tartalmaz egy fedélzeti felületet, gerendákat, csapágyakat, hídfőket, pilléreket és áthajtólemezeket — amelyek mindegyike más-más átfedési stratégiát igényel.
Fedélzeti felület. A hídfedélzetet — a híd burkolati felületét — szabványos nadír felvételekkel mérik fel 80-85%-os előre irányuló és 70-80%-os oldalirányú átfedéssel. A fedélzet jellemzően a híd legkönnyebben képalkotással vizsgálható része, mivel a drón közvetlenül felette repülhet rácsos mintázatban. A szabványos térképezéshez képest magasabb átfedés azért szükséges, mert a hídfedélzetek gyakran tartalmaznak fémfelületeket, dilatációs hézagokat és más alacsony textúrájú jellemzőket, amelyek csökkentik a rendelkezésre álló kötőpontok számát.
Gerendák és alsó oldal. A gerendák és a hídfedélzet alsó oldala ferde vagy vízszintes kameraszögeket igényel, amelyeket jellemzően orbitális mintázatban repülnek a híd alatt vagy mellett. Ezekhez a felvételi szögekhez 70-80%-os előre irányuló átfedés ajánlott, figyelembe véve, hogy az orbitális repülések geometriája megnehezíti a következetes átfedés elérését. Az összetett gerenda- és tartógeometria okklúziókat és parallaxis-eltolódásokat hoz létre, amelyek bonyolítják a jellemzőillesztést, így a többlet átfedés segít biztosítani a megbízható rekonstrukciót.
Csapágyak és pillérek. A hídcsapágyak — a felső- és alsószerkezet közötti terhelést átvivő mechanikus szerelvények — közeli vizsgálatot igényelnek nagyon magas átfedéssel. A csapágyvizsgálathoz a képeket közeli távolságból (3-10 m) készítik 80-90%-os előre irányuló átfedéssel, hogy minden csapágyfelület több szögből legyen rögzítve. A csapágyhibák (korrózió, repedezés, elmozdulás) gyakran kicsik és részletes, több nézőpontból készült dokumentációt igényelnek.
FHWA kutatási eredmények. A Szövetségi Közúti Hatóság (FHWA) és olyan folyóiratok, mint a Remote Sensing által publikált kutatások szisztematikusan értékelték az átfedési követelményeket a hídvizsgálati fotogrammetriához. Egy 2022-es tanulmány megállapította, hogy a 80%-os előre irányuló és 70%-os oldalirányú átfedés teljes 3D hídmodelleket eredményezett olyan pontfelhő-sűrűséggel, amely elegendő volt a 0,3 mm szélességű repedések kimutatására betonfelületeken. Az átfedés 60%-os előre irányuló / 40%-os oldalirányú értékre csökkentése a hídmodell 30%-ánál rekonstrukciós hézagokat eredményezett, különösen a fedélzet alatti árnyékos területeken.
| Hídelem | Kameraszög | Előre irányuló átfedés | Oldalirányú/laterális átfedés | Megjegyzések |
|---|---|---|---|---|
| Fedélzeti felület | Nadír | 80-85% | 70-80% | Rácsos repülési mintázat |
| Gerendák | Ferde (30-45°) | 75-80% | 65-75% | Orbitális vagy lineáris átrepülés |
| Csapágyak | Vízszintes-ferde | 80-90% | 70-80% | Közeli orbitális repülések |
| Hídfők | Ferde (45-60°) | 70-80% | 60-70% | Függőleges felületek |
| Pillérek | Ferde (45-60°) | 70-80% | 60-70% | Többirányú átrepülések |
A megfelelő képátfedés elérése a gyakorlatban gondos repüléstervezést igényel, amely figyelembe veszi a felmérési terület specifikus geometriáját, valamint a drón és a kamera képességeit.
Repüléstervezési munkafolyamat. A szabványos munkafolyamat a felmérési terület határának meghatározásával kezdődik, majd a kívánt GSD és átfedési százalékok kiválasztásával a küldetéstervező szoftverben. A szoftver kiszámítja a szükséges repülési magasságot, a repülési vonalak távolságát és a kamera triggerelési időközét, majd generál egy repülési útvonalat. A modern tervezőeszközök, mint a DroneDeploy, a Pix4Dcapture, a DJI Pilot 2 és az UGCS automatizálják ezt a számítást, de a kezelőnek meg kell értenie az alapul szolgáló paramétereket a terv helyességének ellenőrzéséhez.
Magasságválasztás. A repülési magasság meghatározza mind a GSD-t, mind a kép lábnyomát. A magasabb repülési magasság nagyobb talajlábnyomokat eredményez, ami azt jelenti, hogy kevesebb kép szükséges a felmérési terület lefedéséhez. A magasabb magasság azonban durvább GSD-t is jelent. A magasság, a GSD és az átfedés közötti kapcsolat:
L_nyomvonal = (Mag × Szenzor_magasság) / Gyújtótávolság
L_kereszt = (Mag × Szenzor_szélesség) / Gyújtótávolság
Ahol L_nyomvonal és L_kereszt a nyomvonal menti, illetve keresztirányú talajlábnyom méretek, Mag a repülési magasság a talajszint felett, Szenzor_magasság és Szenzor_szélesség a kameraérzékelő fizikai méretei, és Gyújtótávolság a lencse gyújtótávolsága.
Kamera triggerelési időköz. Az egymást követő kameracxpozíciók közötti idő határozza meg az előre irányuló átfedést. A triggerelési időközt a következőképpen számítják ki:
Triggerelési_időköz (s) = (L_nyomvonal × (1 — O_f / 100)) / Repülési_sebesség
Egy 10 m/s sebességgel repülő drón esetén, 120 m nyomvonal menti kép lábnyommal és 80%-os kívánt előre irányuló átfedéssel a kamerának minden 2,4 másodpercben kell exponálnia. A küldetéstervező szoftver jellemzően automatikusan kezeli ezt a számítást, de a manuális ellenőrzés ajánlott a kritikus felméréseknél.
Repülési vonalak távolsága. A szomszédos repülési vonalak közötti távolság határozza meg az oldalirányú átfedést:
Vonal_távolság = L_kereszt × (1 — O_s / 100)
Egy 160 m keresztirányú kép lábnyom és 65%-os kívánt oldalirányú átfedés esetén a repülési vonalakat 56 m távolságra kell elhelyezni.
Sebességi szempontok. A magasabb repülési sebességek gyorsabb triggerelési időközöket igényelnek az azonos előre irányuló átfedés fenntartásához. 15 m/s sebességnél a triggerelési időköz 80%-os előre irányuló átfedéshez 120 m-es lábnyommal csak 1,6 másodperc. Nem minden kamera képes ilyen gyors felvételi sebességre, különösen memóriakártyára íráskor. A kamera maximális képkocka-sebessége (jellemzően 0,5-2 fps professzionális térképező kameráknál) kemény korlátot szab az elérhető átfedésnek adott sebesség mellett. Ha magasabb átfedésre van szükség, a drónnak lassabban kell repülnie.
Szélhatások. A szél hatására a drón tényleges talajsebessége eltérhet a tervezett sebességtől. A szembeszél csökkenti a talajsebességet, ami hatékonyan növeli az előre irányuló átfedést. A hátszél növeli a talajsebességet, csökkentve az előre irányuló átfedést. Szélsőséges átfedési tűréseknél a küldetéstervező szoftvert talajsebesség-alapú triggerelésre kell konfigurálni az időalapú triggerelés helyett, biztosítva a következetes átfedést a szélviszonyoktól függetlenül.
Akkumulátorkezelés. A magasabb átfedés több képet és hosszabb repülési időt generál. Egy tipikus felmérés 80/65 átfedéssel körülbelül 20-25 percet igényel 50 hektáronként 100 m magasságban. 85/75 átfedésre növelve ez 35-40 percre nyúlik. Nagy területek esetén a küldetést több repülésre kell szegmentálni, amelyeket később a feldolgozó szoftverben egyesítenek.
A repüléstervező szoftver a tervezett talajszint feletti magasság (AGL) alapján számítja ki az átfedést. A valós terep azonban ritkán sík, és a tényleges átfedés a talajszinten jelentősen eltérhet a tervezett értékektől.
A terepmagasság problémája. Amikor a drón egy tervezett AGL-en repül jelentős magasságváltozásokkal rendelkező terep felett, a tényleges talajtávolság változik. Dombok felett a drón közelebb van a tervezettnél, ami csökkenti a tényleges kép lábnyomot és növeli a GSD-t. Völgyekben a drón távolabb van a tervezettnél, növelve a kép lábnyomot és durvítva a GSD-t. Az átfedés százalékos aránya ennek megfelelően változik — az átfedés nő a dombtetők felett (ahol a kép lábnyom zsugorodik) és csökken a völgyekben (ahol a lábnyom kitágul).
Terepet követő repülés. A terepet követő repülési módok előre betöltött digitális magassági modellt (DEM) vagy valós idejű magasságérzékelést használnak az állandó AGL fenntartásához változó terep felett. Ez megőrzi a tervezett átfedést és GSD-t a felmérési területen. A terepet követő repülés elengedhetetlen a dombos vagy hegyvidéki terepen végzett felmérésekhez. Enélkül az átfedés 10-20 százalékpontot is változhat a dombtetők és völgyek között, ami fedési hézagokhoz vezet az alacsonyabb területeken.
Városi terep. Az épületek és más építmények drámai helyi reliefet hoznak létre, amely befolyásolja az átfedést. Egy épület, amely 30 m-rel emelkedik a környező terep fölé, 30 m-rel csökkenti az effektív kamera-tető távolságot, ami 15-20 százalékponttal csökkentheti a tényleges előre irányuló átfedést a tető szintjén a tervezett értékhez képest. Városi felméréseknél az átfedést növelni kell a kompenzáláshoz — 80-85%-os előre irányuló átfedéstől kezdve a megfelelő fedés biztosításához a tető szintjén.
Erdő- és lombsátor hatások. A sűrű fák lombkoronája egy olyan effektív felületet hoz létre, amely magasabb és szabálytalanabb, mint a talaj magassága. A talajmagasságon alapuló átfedési számítások alábecsülik a tényleges átfedést a lombkorona szintjén. Erdészeti felméréseknél a küldetéstervezés során a várható lombkorona-magasságot kell használni a talajmagasság helyett az AGL referenciaértékhez.
Okklúziós árnyékok. A magas objektumok okklúziós árnyékokat hoznak létre — olyan területeket, amelyek nem láthatók a felvételeken, mert az objektum mögött rejtőznek. Az okklúziós árnyékok a nadír felvételeknél a legnagyobbak, ahol a rejtett terület az objektumtól távolodva terjed ki. A magasabb átfedés segít enyhíteni az okklúziós árnyékokat azáltal, hogy biztosítja, hogy az okkludált területek más kamerapozíciókból is láthatók legyenek a repülési vonal mentén.
A felvételek elkészítése után az átfedést ellenőrizni kell, mielőtt elhagynák a felmérési helyszínt, hogy a szoftveres feldolgozáshoz alkalmas legyen az adat. A repülés utáni ellenőrzés időben felfedi a problémákat, mielőtt a repülési csapat elhagyja a területet, és az újrarepülés költsége megfizethetetlenné válna.
Helyszíni ellenőrzési módszerek. A leginkább hozzáférhető módszer a kép lábnyomok áttekintése a küldetéstervező alkalmazásban közvetlenül a repülés után. A legtöbb alkalmazás az egyes képek hozzávetőleges talajfedettségét téglalapként jeleníti meg egy térképen. A téglalapok közötti hézagok fedési hiányosságokat jeleznek. A nagyon keskeny átfedési zónákkal rendelkező szomszédos téglalapok marginális átfedést jeleznek, ami feldolgozási problémákat okozhat. Számos alkalmazás jelenti a küldetés során elért minimális, átlagos és maximális átfedést is.
Kamerapozíció-sűrűség ellenőrzése. A kép pozíciók gyors számbavétele a felmérési területhez viszonyítva hozzávetőleges átfedés-ellenőrzést ad. Egy 10 hektáros terület 100 m magasságban 80/65 átfedéssel körülbelül 100-150 képet kell, hogy produkáljon. Ha a szám jelentősen alacsonyabb, az átfedés nem megfelelő lehet. A küldetéstervező alkalmazások jellemzően megadják a várható képszámokat a tervezés során, és a tényleges számnak szorosan kell egyeznie.
Fotogrammetriai minőségi jelentések. A feldolgozás megkezdése után a fotogrammetriai szoftver minőségi jelentéseket generál, amelyek feltárják az átfedési problémákat. A legfontosabb mutatók a következők:
Újrarepülés tervezése. Ha az ellenőrzés nem megfelelő átfedést tár fel, a felmérést újra kell repülni. A legegyszerűbb korrekció mindkét átfedési paraméter 5-10 százalékpontos növelése. Olyan helyszíneken, ahol a terep vagy a szerkezetek okozták a problémát, terepet követő repülésre vagy magasabb alapmagasságra lehet szükség. Alacsony textúrájú felületekhez talajszintű vezérlőpontok vagy mesterséges textúra-jelölők hozzáadása javíthatja a jellemzőillesztést.
Biztonsági tartalékok. Az ajánlott megközelítés a biztonsági tartalékkal történő tervezés: állítsa az átfedést 5%-kal magasabbra, mint az alkalmazás elméleti minimuma. Ez figyelembe veszi a szélhatásokat, a GPS-eltolódást, a terep változatosságát és azokat az elkerülhetetlen kisebb eltéréseket az ideális repülési útvonaltól, amelyek a valós műveletek során előfordulnak.
A képátfedés — amely magában foglalja az előre irányuló átfedést (endlap / nyomvonal menti átfedés) és az oldalirányú átfedést (sidelap / laterális / keresztirányú átfedés) — az az alapvető felvételi paraméter, amely meghatározza, hogy egy fotogrammetriai felmérés sikerül-e vagy sem. A 75-85%-os előre irányuló átfedés biztosítja, hogy minden talajpont minden repülési vonalon több egymást követő képen jelenjen meg. A 60-75%-os oldalirányú átfedés biztosítja a folyamatos fedést a szomszédos repülési vonalak között hézagok nélkül. Ezek a paraméterek együttesen hozzák létre azt a geometriai redundanciát, amelyet a Structure from Motion algoritmusok megkövetelnek a megbízható jellemzőillesztéshez, a kamerapozíció háromszögeléshez és a sűrű 3D rekonstrukcióhoz.
A nem megfelelő átfedés rekonstrukciós hézagokat, sikertelen illesztést, csökkent pontosságot és hiányzó adatterületeket eredményez — olyan problémákat, amelyek utólagos feldolgozással nem javíthatók. A túlzott átfedés 3-5x-szeresére növeli a repülési időt, a tárhelyet és a feldolgozási időt arányos pontosságnövekedés nélkül. A gyakorlati optimum a legtöbb alkalmazás esetében 75-85%-os előre irányuló és 60-75%-os oldalirányú átfedésnél van, a magasabb értékeket az alacsony textúrájú felületek, az összetett szerkezetek (pl. hidak) és a centiméter alatti pontossági követelmények esetére fenntartva.
A burkolat- és futópálya-vizsgálat a magasabb átfedésből profitál (80-85% előre irányuló, 70-75% oldalirányú), mivel az egységes aszfaltfelületek kevesebb természetes kötőpontot biztosítanak. A hídvizsgálat speciális átfedési stratégiákat igényel a különböző szerkezeti elemekhez: 80-85% előre irányuló a fedélzeti felületekhez, 75-80% a gerendákhoz és 80-90% a közeli csapágyvizsgálathoz. A kép lábnyomok és fotogrammetriai minőségi jelentések repülés utáni ellenőrzése biztosítja, hogy a problémák azonosításra kerüljenek, mielőtt a felmérési csapat elhagyja a helyszínt, megelőzve a költséges újramobilizálást.
A TarmacView szakértő drónos fotogrammetriai szolgáltatásokat nyújt optimalizált képátfedéssel burkolatok, infrastruktúra és repülőtéri eszközök vizsgálatához. Vegye fel velünk a kapcsolatot egyedi felmérési ajánlatért.
A térbeli felbontás az a kulcsmutató, amely meghatározza a képalkotó rendszer képességét a finom részletek megkülönböztetésére; létfontosságú a légi közlekedés,...
A nadir felvétel olyan légifelvétel, amelyet a kamera függőlegesen lefelé, a talajra merőlegesen irányítva készítenek, minimális perspektivikus torzítást eredmé...
A kamera kalibráció meghatározza a belső paramétereket (fókusztávolság, főpont, lencse torzítási együtthatók), amelyek elengedhetetlenek a pontos fotogrammetria...