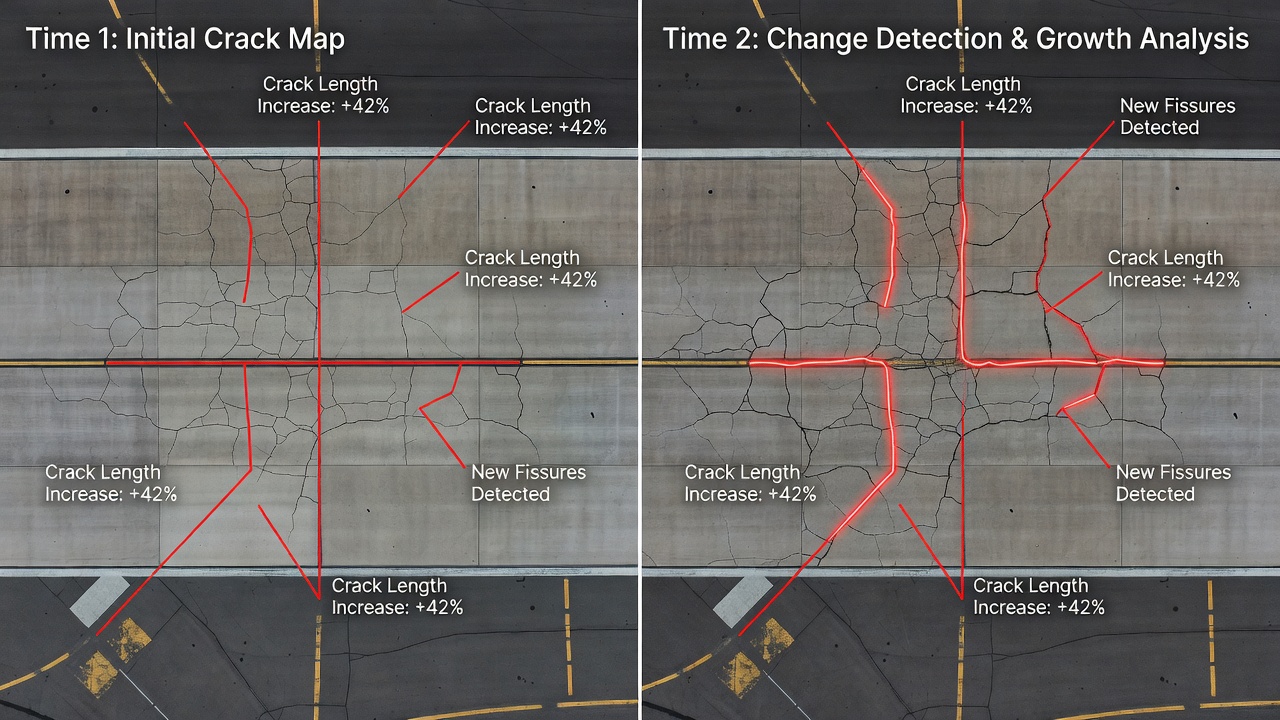
Wykrywanie zmian porównuje współzarejestrowane obrazy lub chmury punktów tej samej struktury wykonane w różnych momentach, aby zidentyfikować nowe, pogłębiające się lub naprawione uszkodzenia — pęknięcia, które się powiększyły, ubytki, które się zwiększyły, korozję, która się rozprzestrzeniła. Umożliwia ilościowe śledzenie degradacji w czasie dla monitorowania infrastruktury.
Wykrywanie zmian w monitorowaniu infrastruktury
Definicja i cel
Wykrywanie zmian to proces identyfikacji różnic w stanie konstrukcji, powierzchni lub środowiska poprzez porównywanie obserwacji wykonanych w różnych momentach. W kontekście monitorowania infrastruktury cywilnej wykrywanie zmian systematycznie porównuje współzarejestrowane obrazy, ortomozai lub trójwymiarowe chmury punktów tego samego składnika majątku — pasa startowego, płyty mostu, jezdni lub budynku — wykonane podczas powtarzalnych badań, w celu zidentyfikowania nowych uszkodzeń, określenia ilościowego postępu istniejącej degradacji oraz weryfikacji skuteczności interwencji utrzymaniowych. W przeciwieństwie do inspekcji punktowej w czasie, która rejestruje tylko migawkę bieżącego stanu, wykrywanie zmian ujawnia wymiar czasowy degradacji: które pęknięcia aktywnie rosną, które obszary ubytków się powiększają, gdzie rozprzestrzenia się korozja i jakie deformacje się kumulują.
Podstawowym celem wykrywania zmian jest przekształcenie danych o stanie infrastruktury ze statycznych migawek w dynamiczne zapisy czasowe. Pojedyncza inspekcja odpowiada na pytanie „jaki jest bieżący stan?" Wykrywanie zmian odpowiada na bardziej istotne operacyjnie pytanie „jak zmienia się stan?" To rozróżnienie ma kluczowe znaczenie dla zarządzania infrastrukturą, ponieważ degradacja jest procesem dynamicznym. Pęknięcie, które pozostawało stabilne przy szerokości 0,3 mm przez trzy lata, stanowi inny priorytet utrzymania niż pęknięcie, które urosło z 0,3 mm do 1,5 mm w tym samym okresie, mimo że oba pęknięcia wyglądają identycznie w pojedynczej inspekcji. Wykrywanie zmian określa ilościowo to tempo degradacji, umożliwiając planowanie utrzymania opartego na stanie, prognozowanie budżetu i ocenę ryzyka, które są niemożliwe przy statycznych inspekcjach.
W zarządzaniu nawierzchniami lotniskowymi zgodnie z ICAO Annex 14 — Lotniska, Tom I, operator lotniska jest zobowiązany do utrzymywania nawierzchni w stanie zapobiegającym uszkodzeniom statków powietrznych i wolnym od luźnych materiałów. O ile okresowe inspekcje wizualne spełniają podstawowe wymogi zgodności, ICAO Doc 9157 (Podręcznik projektowania lotnisk, Część 3: Nawierzchnie) oraz norma ASTM D5340 dotycząca wskaźnika stanu nawierzchni lotniskowej (PCI) podkreślają znaczenie śledzenia trendów degradacji w czasie. Wykrywanie zmian stanowi ilościową podstawę analizy trendów, umożliwiając operatorom lotnisk identyfikację nawierzchni z przyspieszającym tempem degradacji, zanim osiągną one krytyczny stan. Metodologia bezpośrednio wspiera cele Globalnego Planu Żeglugi Powietrznej ICAO (GANP) dotyczące odporności infrastruktury i optymalizacji utrzymania opartej na ryzyku.
Koncepcja wykrywania zmian wywodzi się z teledetekcji i analizy geoprzestrzennej, gdzie została opracowana do monitorowania zmian użytkowania gruntów, śledzenia wylesiania i analizy rozwoju urbanistycznego z wykorzystaniem obrazów satelitarnych. Te podstawowe metody — różnicowanie obrazów, analiza głównych składowych i porównanie poklasyfikacyjne — zostały zaadaptowane i rozszerzone do zastosowań infrastrukturalnych, w których skala zmian jest znacznie mniejsza (milimetry do centymetrów, a nie metry do kilometrów), a wymagania dotyczące dokładności są odpowiednio wyższe. Nowoczesne wykrywanie zmian w infrastrukturze działa z czułością poniżej milimetra dla pomiarów pęknięć i poniżej centymetra dla monitorowania deformacji.
Rejestracja obrazów — warunek wstępny wykrywania zmian
Dlaczego dokładność rejestracji decyduje o jakości wykrywania zmian
Wiarygodne wykrywanie zmian zależy zasadniczo od dokładności rejestracji obrazów — procesu geometrycznego wyrównywania dwóch lub więcej obrazów tej samej sceny, tak aby odpowiadające sobie piksele reprezentowały to samo fizyczne miejsce na konstrukcji. Bez precyzyjnej rejestracji każde porównanie obrazów będzie zawierało fałszywe sygnały zmian na krawędziach obiektów, granicach tekstur i cechach powierzchni, które są po prostu źle wyrównane, a nie fizycznie zmienione. Błędy rejestracji nawet na poziomie jednego piksela mogą powodować fałszywe artefakty zmian, które przytłaczają rzeczywiste sygnały uszkodzeń, szczególnie w przypadku małych uszkodzeń, takich jak pęknięcia, które mogą mieć tylko 2-5 pikseli szerokości w typowych obrazach infrastruktury.
Zależność między dokładnością rejestracji a minimalną wykrywalną zmianą jest regulowana przez stosunek sygnału do szumu systemu detekcji. W przypadku metod wykrywania zmian opartych na pikselach błędy rejestracji pojawiają się jako szum addytywny w obrazie różnicowym. Badania konsekwentnie wykazują, że subpikselowa dokładność rejestracji — typowo poniżej 0,5 piksela błędu średniokwadratowego (RMSE) — jest wymagana do wiarygodnego wykrywania małych zmian uszkodzeń. Przy terenowej odległości próbkowania (GSD) wynoszącej 1 mm na piksel (typowe dla precyzyjnych badań pasów startowych) odpowiada to tolerancji wyrównania geometrycznego na poziomie 0,5 mm. Osiągnięcie tej tolerancji w powtarzalnych badaniach przeprowadzanych miesiące lub lata później wymaga spójnych metodologii badawczych, stabilnych sieci punktów kontroli naziemnej i solidnych algorytmów rejestracji.
Rejestracja obrazów oparta na cechach
Rejestracja oparta na cechach identyfikuje charakterystyczne, powtarzalne cechy zarówno w obrazie referencyjnym, jak i docelowym, ustanawia korespondencje między tymi cechami i oblicza transformację geometryczną, która odwzorowuje obraz docelowy w układ współrzędnych obrazu referencyjnego. To podejście jest najszerzej stosowaną metodą wykrywania zmian w infrastrukturze, ponieważ jest odporne na zmiany oświetlenia, umiarkowane różnice kąta widzenia i sezonowe zmiany wyglądu powierzchni, które nie stanowią degradacji strukturalnej.
Proces rejestracji rozpoczyna się od detekcji cech przy użyciu algorytmów zaprojektowanych do powtarzalności w różnych warunkach obrazowania. SIFT (Scale-Invariant Feature Transform) pozostaje najszerzej stosowanym detektorem do rejestracji infrastruktury, identyfikując punkty kluczowe w lokalizacjach o wysokim gradiencie przestrzennym, które są odporne na zmiany skali i obrót. SURF (Speeded-Up Robust Features) zapewnia szybsze obliczenia przy porównywalnej wydajności w wielu zastosowaniach. W przypadku nawierzchni, gdzie tekstura jest stosunkowo jednolita, cechy ORB (Oriented FAST and rotated BRIEF) oraz AKAZE oferują alternatywy z różnymi kompromisami między wydajnością obliczeniową a solidnością dopasowania. Typowa 20-megapikselowa ortomozai 500-metrowego odcinka pasa startowego daje 10 000–50 000 wykrywalnych cech, w zależności od tekstury nawierzchni, rozstawu spoin i oznakowania powierzchni.
Dopasowywanie cech ustanawia korespondencję między wykrytymi cechami w obrazie referencyjnym i docelowym przy użyciu podobieństwa wektorów deskryptorów, mierzonego zazwyczaj jako odległość euklidesowa lub odległość Hamminga między wektorami deskryptorów. Początkowy zestaw dopasowań nieuchronnie zawiera wartości odstające — nieprawidłowe korespondencje wynikające z powtarzalnych wzorców, podobnych fragmentów tekstur lub niejednoznaczności cech. Odrzucanie wartości odstających wykorzystuje RANSAC (Random Sample Consensus) lub jego warianty (MLESAC, MSAC) do iteracyjnego szacowania modelu transformacji, klasyfikując dopasowania jako zgodne lub niezgodne na podstawie ich zgodności z szacowanym modelem. Próg RANSAC wynoszący 2-3 piksele w rozdzielczości ortomozai jest typowy dla wykrywania zmian w infrastrukturze, odrzucając dopasowania, których błąd resztowy przekracza tę wartość.
Model transformacji geometrycznej jest wybierany na podstawie oczekiwanej deformacji między badaniami. W przypadku powtarzalnych badań dronem prowadzonych ze spójnymi parametrami lotu i pozycjonowaniem RTK zazwyczaj wystarcza transformacja podobieństwa (przesunięcie, obrót, skala jednolita) lub transformacja afiniczna (sześć parametrów: dwa przesunięcia, dwie skale, dwa ścinania). W przypadku badań ze znacznymi różnicami perspektywy lub zmiennością terenu może być wymagana transformacja rzutowa (osiem parametrów, zwana także homografią) lub transformacja wielomianowa (wyższego rzędu, zazwyczaj 2. lub 3. rzędu dla badań dużych obszarów). Transformacja jest obliczana z dopasowań zgodnych przy użyciu estymacji najmniejszych kwadratów, a resztkowy RMSE służy jako podstawowa miara jakości. RMSE rejestracji poniżej 0,5 piksela jest celem dla wysokiej jakości wykrywania zmian; RMSE powyżej 1 piksela wskazuje na potrzebę poprawy punktów kontrolnych lub wyboru modelu transformacji.
Rejestracja obrazów oparta na intensywności
Rejestracja oparta na intensywności działa bezpośrednio na wartościach intensywności pikseli, a nie na dyskretnych cechach, optymalizując parametry transformacji w celu maksymalizacji miary podobieństwa obliczonej dla nakładającego się obszaru obrazu. To podejście jest korzystne, gdy treść obrazu nie zawiera wystarczającej liczby charakterystycznych cech do wiarygodnego dopasowania cech — na przykład świeżo ułożone powierzchnie betonowe, równomiernie teksturowany asfalt lub powierzchnie pokryte wodą lub gruzem. Metody oparte na intensywności są również używane do dostrajania po wstępnej rejestracji opartej na cechach, osiągając subpikselową dokładność wymaganą dla wykrywania zmian o wysokiej czułości.
Proces optymalizacji iteracyjnie transformuje obraz docelowy, oblicza miarę podobieństwa w odniesieniu do obrazu referencyjnego i dostosowuje parametry transformacji w celu poprawy miary. Typowe miary podobieństwa obejmują:
Znormalizowana korelacja krzyżowa (NCC) oblicza współczynnik korelacji między odpowiadającymi sobie intensywnościami pikseli po znormalizowaniu każdego okna obrazu do średniej zerowej i jednostkowego odchylenia standardowego. Wartości NCC mieszczą się w zakresie od -1 do +1, przy czym wartości bliskie 1 wskazują na silne wyrównanie. NCC jest odporna na liniowe różnice intensywności między obrazami, co czyni ją odpowiednią do badań z różnymi ustawieniami ekspozycji lub niewielkimi zmianami oświetlenia.
Informacja wzajemna (MI) mierzy zależność statystyczną między rozkładami intensywności dwóch obrazów, opartą na entropii informacyjnej. MI jest szczególnie odporna na nieliniowe różnice intensywności między obrazami, takie jak te spowodowane różnymi typami sensorów, sezonowymi zmianami roślinności lub warunkami mokrej versus suchej powierzchni. MI między dwoma idealnie wyrównanymi obrazami tej samej sceny jest maksymalizowana, gdy łączny rozkład intensywności ma minimalną entropię — tj. zależność między intensywnościami jest tak przewidywalna, jak to możliwe.
Suma kwadratów różnic (SSD) i suma bezwzględnych różnic (SAD) to najprostsze miary, bezpośrednio obliczające różnicę intensywności piksel po pikselu. Zakładają one, że odpowiadające sobie piksele w dwóch obrazach powinny mieć identyczne intensywności po wyrównaniu geometrycznym — założenie rzadko spełniane w praktyce ze względu na zmiany oświetlenia, ekspozycji i odpowiedzi sensora. SSD i SAD są zazwyczaj używane tylko do dopasowania stereoskopowego wielu widoków w ramach jednej epoki badania, a nie do międzyczasowego wykrywania zmian.
Algorytmy optymalizacji rejestracji opartej na intensywności obejmują gradient prosty, metodę Powella i algorytm Levenberga-Marquardta. Strategie wielorozdzielcze (od zgrubnej do dokładnej) są standardem, zaczynając od próbkowanych w dół obrazów w celu oszacowania przybliżonego wyrównania i stopniowo udoskonalając przy wyższych rozdzielczościach. Dla wykrywania zmian w infrastrukturze rejestracja oparta na intensywności osiąga zazwyczaj dokładność 0,1-0,3 piksela po dostrojeniu, w porównaniu z 0,3-0,8 piksela dla metod opartych wyłącznie na cechach.
Rejestracja georeferencyjna z wykorzystaniem GCP i GNSS
Rejestracja georeferencyjna wykorzystuje pomierzone punkty kontroli naziemnej (GCP) oraz precyzyjne pozycje kamery z GNSS RTK (Real-Time Kinematic) lub PPK (Post-Processed Kinematic) do bezpośredniego ustalenia geometrycznej zależności między obrazami a współrzędnymi świata rzeczywistego. Każdy obraz jest geotagowany pozycją kamery (X, Y, Z) i orientacją (omega, phi, kappa) z pokładowego GNSS/IMU, a informacja ta jest udoskonalana podczas przetwarzania fotogrametrycznego przy użyciu GCP pomierzonych z dokładnością centymetrową.
Dla wykrywania zmian kluczową zaletą rejestracji georeferencyjnej jest to, że powtarzalne badania są z natury rzeczy wyrównane do tego samego układu współrzędnych, co znacznie upraszcza problem rejestracji. Zamiast obliczać transformacje parami między epokami badań, każde badanie jest przetwarzane niezależnie w celu uzyskania ortomozai i chmur punktów we wspólnym układzie odniesienia współrzędnych (typowo WGS84 z lokalną poprzeczną projekcją Mercatora). Pozostałe niewspółosiowości między badaniami są następnie korygowane przy użyciu transformacji resztkowej oszacowanej na podstawie stabilnych cech widocznych w obu zestawach danych — oznakowania nawierzchni, świateł pasa startowego, uszczelnień spoin lub dedykowanych celów pomiarowych.
Norma ISO 19157 dotycząca jakości informacji geograficznej określa wymagania dotyczące dokładności pozycyjnej danych geoprzestrzennych, które mają bezpośrednie zastosowanie do georeferencyjnego wykrywania zmian. W monitorowaniu infrastruktury typowymi celami dokładności są RMSE poziomy poniżej 3 cm i RMSE pionowy poniżej 5 cm dla badań nawierzchni. Gdy dokładności te są osiągane poprzez fotogrametrię opartą na GCP lub pozycjonowanie dronem RTK, resztkowy błąd rejestracji między powtarzalnymi badaniami wynosi typowo 1-3 piksele przy GSD 1 mm, który jest następnie redukowany poprzez precyzyjną rejestrację do poziomu subpikselowego.
ICAO Annex 15 — Służby informacji lotniczej ustanawia wymagania jakościowe dla danych lotniczych, które wpływają na projektowanie badań wykrywania zmian. Dane badawcze wykorzystywane do zarządzania nawierzchniami lotniskowymi muszą spełniać określone poziomy dokładności, rozdzielczości i integralności, proporcjonalne do krytyczności danych. W zastosowaniach wykrywania zmian, gdzie dane badawcze wpływają na decyzje utrzymaniowe dotyczące bezpieczeństwa pasów startowych, wymagania dotyczące jakości danych są odpowiednio rygorystyczne, wymagając udokumentowanej weryfikacji dokładności przy użyciu niezależnych punktów kontrolnych i kompleksowego raportowania metadanych.
Metody wykrywania zmian
Różnicowanie obrazów
Różnicowanie obrazów to najprostsza i najbardziej wydajna obliczeniowo metoda wykrywania zmian. Po rejestracji obliczana jest różnica piksel po pikselu między obrazem referencyjnym a docelowym: Difference(x, y) = I_target(x, y) - I_reference(x, y). Dla obrazów w skali szarości z 8-bitowymi wartościami intensywności (0-255) obraz różnicowy ma zakres od -255 do +255, typowo przeskalowany do 0-255 do wizualizacji. Obszary bez zmian dają wartości różnic bliskie zeru (z zastrzeżeniem szumu sensora i niewielkich zmian oświetlenia), podczas gdy obszary fizycznych zmian dają znaczące dodatnie lub ujemne odchylenia.
Krytycznym parametrem w różnicowaniu obrazów jest próg zmian — wielkość różnicy, powyżej której piksel jest klasyfikowany jako zmieniony. Wybór odpowiedniego progu wymaga zrównoważenia wskaźnika detekcji (poprawne identyfikowanie rzeczywistych zmian) ze wskaźnikiem fałszywych alarmów (nieprawidłowe klasyfikowanie niezmienionych pikseli jako zmienionych). Optymalny próg zależy od stosunku sygnału do szumu systemu obrazowania, dokładności rejestracji i wielkości docelowych zmian. Typowe podejścia do wyboru progu obejmują:
Progowanie odchyleniem standardowym ustawia próg na k × σ, gdzie σ jest odchyleniem standardowym obrazu różnicowego w obszarach znanych jako niezmienione, a k jest mnożnikiem typowo między 2 a 5. Próg 3σ odpowiada w przybliżeniu 99,7% ufności, że różnica pikseli przekraczająca tę wartość reprezentuje rzeczywistą zmianę, przy założeniu normalnie rozłożonego szumu.
Metoda Otsu oblicza próg minimalizujący wariancję wewnątrzklasową między pikselami zmienionymi i niezmienionymi, automatycznie dostosowując się do właściwości statystycznych każdego obrazu różnicowego. Jest skuteczna, gdy obszar zmian stanowi umiarkowany ułamek całkowitego obrazu (5-30%).
Progowanie bayesowskie modeluje obraz różnicowy jako mieszaninę dwóch rozkładów — piksele bez zmian podążające za wąskim rozkładem Gaussa wyśrodkowanym w zerze, a piksele ze zmianami podążające za szerszym rozkładem z potencjalnie niezerową średnią. Algorytm Expectation-Maximization (EM) szacuje parametry obu rozkładów, a optymalny próg jest obliczany z przecięcia dwóch rozkładów.
Różnicowanie obrazów jest najskuteczniejsze w wykrywaniu zmian w wyglądzie powierzchni: nowe pęknięcia (ciemne liniowe cechy na jasnej nawierzchni), plamy z wycieków lub rozlania chemikaliów, wzrost roślinności i przebarwienia powierzchni spowodowane inicjacją korozji. Jest mniej skuteczne w przypadku ilościowego określania zmian geometrycznych, które nie powodują silnych różnic intensywności — na przykład poszerzenie pęknięcia, gdy pęknięcie było już widoczne w obrazie referencyjnym, a wzrost szerokości powoduje tylko subtelne przesunięcia krawędzi.
Analiza głównych składowych (PCA)
Analiza głównych składowych (PCA) zastosowana do wykrywania zmian przekształca wieloczasowe dane obrazowe w nowy układ współrzędnych, w którym informacja o zmianach jest skoncentrowana w określonych składowych. Dla pary obrazów (referencyjnego i docelowego) PCA jest obliczana na połączonej macierzy danych, dając dwie główne składowe. Pierwsza główna składowa przechwytuje wspólną informację — piksele, które są podobne między dwoma obrazami. Druga główna składowa przechwytuje różnicę resztkową — informację o zmianach.
Zaletą PCA w porównaniu do prostego różnicowania jest to, że automatycznie dekoreluje dane, oddzielając sygnały zmian od systematycznych różnic w ogólnej jasności, kontraście i odpowiedzi sensora. To czyni PCA bardziej odporną na zmiany oświetlenia między badaniami. Obraz zmian PCA (typowo druga główna składowa) często ujawnia subtelne zmiany, które byłyby zagrzebane w szumie przy użyciu bezpośredniego różnicowania.
Dla analizy wieloczasowej z trzema lub więcej epokami badań Multivariate Alteration Detection (MAD) rozszerza koncepcję PCA. MAD znajduje liniowe transformacje danych wieloczasowych, które maksymalizują korelację między transformowanymi pasmami, a następnie identyfikuje zmiany jako odchylenia od tej struktury korelacji. Składowe MAD są uporządkowane według malejącej zawartości informacji o zmianach, umożliwiając analitykowi skupienie się na najistotniejszych sygnałach zmian. Iteracyjnie ważony MAD (IR-MAD) poprawia solidność poprzez iteracyjne zmniejszanie wag pikseli zidentyfikowanych jako zmienione w poprzednich iteracjach, udoskonalając model tła bez zmian.
Wykrywanie zmian z wykorzystaniem uczenia maszynowego
Metody uczenia maszynowego do wykrywania zmian znacznie się rozwinęły wraz z dostępnością dużych zestawów danych treningowych i architektur głębokiego uczenia. Metody te uczą się mapowania z par obrazów na mapy zmian bezpośrednio z oznaczonych przykładów, zamiast polegać na ręcznie tworzonych progach lub modelach statystycznych. Trzy główne kategorie wykrywania zmian opartego na ML są istotne dla monitorowania infrastruktury:
Klasyfikacja na poziomie pikseli traktuje każdy piksel niezależnie, klasyfikując go jako zmianę lub brak zmiany na podstawie cech wyodrębnionych z odpowiadających sobie pikseli w obu obrazach plus kontekstu sąsiedztwa. Cechy mogą obejmować różnice spektralne, miary tekstury (GLCM, filtry Gabora), lokalne statystyki przestrzenne i reprezentacje wieloskalowe. Klasyfikatory Random Forest, Support Vector Machines (SVM) i Gradient Boosting są powszechnie wybierane. Trenowanie wymaga oznaczonych map zmian dla reprezentatywnego zestawu powierzchni infrastrukturalnych i typów uszkodzeń.
Głębokie uczenie oparte na fragmentach wykorzystuje konwolucyjne sieci neuronowe (CNN) działające na fragmentach obrazu wyśrodkowanych na każdym pikselu. Architektura sieci syjamskiej przetwarza fragment referencyjny i fragment docelowy przez dwie identyczne gałęzie CNN z wspólnymi wagami, następnie moduł porównania (konkatenacja, różnicowanie lub korelacja) łączy reprezentacje cech, a głowica klasyfikacyjna generuje prawdopodobieństwo zmiany dla środkowego piksela. Architektury oparte na UNet z połączeniami pomijającymi są szczególnie skuteczne w wykrywaniu zmian, ponieważ zachowują rozdzielczość przestrzenną, jednocześnie integrując kontekst wieloskalowy. Zestawy danych treningowych do wykrywania zmian w infrastrukturze muszą zawierać reprezentatywne przykłady każdego typu uszkodzenia (pęknięcia, ubytki, korozja, plamy) w różnych warunkach oświetleniowych i powierzchniowych.
Obiektowe wykrywanie zmian (OBIA) najpierw segmentuje obraz na znaczące obiekty — poszczególne płyty nawierzchni, segmenty pęknięć, obszary ubytków — a następnie porównuje obiekty w czasie, a nie piksele. To podejście jest szczególnie dobrze dostosowane do monitorowania infrastruktury, ponieważ uszkodzenia są z natury obiektopodobne: ubytek to obszar ciągły, pęknięcie to cecha liniowa, plamy korozji są przestrzennie spójne. Obiektowe wykrywanie zmian oblicza zmiany właściwości obiektów (powierzchnia, obwód, kształt, średnia intensywność) i klasyfikuje obiekty jako stabilne, rosnące, kurczące się lub nowe. Podejście obiektowe z natury redukuje szum z izolowanych artefaktów pikselowych i dostarcza informacji o zmianach w kategoriach bezpośrednio istotnych dla oceny stanu infrastruktury — powierzchnia nowego ubytku, długość rozszerzenia pęknięcia, procentowy wzrost pokrycia korozją.
Metoda
Typowa dokładność
Zalety
Ograniczenia
Różnicowanie obrazów
60-75% dokładności pikselowej
Prosta, szybka, interpretowalna
Wrażliwa na oświetlenie, wymaga optymalnego progu
PCA / MAD
70-85% dokładności pikselowej
Odporna na zmiany jasności
Wymaga danych wielospektralnych lub wieloczasowych
Random Forest / SVM
75-88% dokładności pikselowej
Obsługuje nieliniowe zależności
Wymaga oznaczonych danych treningowych, ograniczona generalizacja
CNN (syjamska UNet)
85-95% dokładności pikselowej
Wysoka dokładność, uczy się kontekstu przestrzennego
Wymaga dużych danych treningowych, intensywna obliczeniowo
OBIA
80-92% dokładności obiektowej
Metryki zmian odpowiadają semantyce uszkodzeń
Zależna od jakości segmentacji, złożony przepływ pracy
Wykrywanie zmian pęknięć
Ilościowe określanie wzrostu pęknięć
Wykrywanie zmian pęknięć jest najczęstszym i operacyjnie najważniejszym zastosowaniem analizy czasowej w monitorowaniu infrastruktury. Wzrost pęknięć — zwiększenie szerokości, długości lub gęstości pęknięcia w czasie — jest podstawowym wskaźnikiem aktywnej degradacji konstrukcji betonowych i asfaltowych. Wykrywanie zmian dla pęknięć musi działać z czułością poniżej milimetra, ponieważ mierzone różnice są często mniejsze niż samo pęknięcie: pęknięcie, które miało 0,5 mm szerokości w badaniu wyjściowym i ma 1,2 mm w badaniu kontrolnym, reprezentuje zmianę 0,7 mm, która musi być wiarygodnie wykryta pomimo szumu obrazu i niepewności rejestracji.
Pikselowe wykrywanie zmian pęknięć wykorzystuje różnicowe mapowanie pęknięć, w którym porównywane są mapy prawdopodobieństwa pęknięć z każdej epoki badania. Mapa prawdopodobieństwa pęknięć — generowana przez model głębokiego uczenia do segmentacji pęknięć lub przez konwencjonalny algorytm wykrywania pęknięć — przypisuje każdemu pikselowi wartość między 0 (brak pęknięcia) a 1 (pewne pęknięcie). Mapa zmian to różnica piksel po pikselu w prawdopodobieństwie pęknięcia między epokami, przy czym wartości dodatnie wskazują na nowe lub poszerzone pęknięcia, a wartości ujemne na pęknięcia zagojone lub uszczelnione. Filtracja morfologiczna usuwa izolowane zmienione piksele, a analiza składowych połączonych grupuje zmienione piksele w dyskretne obiekty zmian.
Ilościowy pomiar zmiany szerokości pęknięcia wymaga subpikselowej lokalizacji krawędzi. Dla każdego segmentu pęknięcia w sieci pęknięć krawędzie pęknięcia są wyodrębniane w rozdzielczości subpikselowej przy użyciu metod takich jak wykrywanie krawędzi schodkowej (dopasowanie odpowiedzi krawędzi do funkcji schodkowej i znalezienie subpikselowego przejścia przez zero), wykrywanie krawędzi oparte na momentach (obliczanie pozycji krawędzi z momentów obrazu) lub modele aktywnego konturu (węże), które ewoluują, aby dopasować się do granic pęknięcia. Szerokość w każdym punkcie wzdłuż pęknięcia jest obliczana jako odległość między dwiema subpikselowymi pozycjami krawędzi mierzona prostopadle do linii środkowej pęknięcia. Zmiana szerokości to następnie różnica punkt po punkcie między epokami, a średni wzrost szerokości na długości segmentu pęknięcia jest statystyką zbiorczą. Dla badań nawierzchni lotniskowych przy GSD 1 mm zmiana szerokości pęknięcia rzędu 0,2-0,3 mm jest wiarygodnie wykrywalna przy użyciu metod subpikselowych z precyzją lokalizacji krawędzi 0,1 piksela.
Wydłużenie długości pęknięcia mierzy wzrost całkowitej długości sieci pęknięć. Wymaga to wektoryzacji szkieletu pęknięcia w każdej epoce jako zestawu polilinii, a następnie dopasowania segmentów pęknięć między epokami przy użyciu kryteriów nakładania przestrzennego i bliskości. Nowe przedłużenie pęknięcia pojawia się jako segmenty pęknięć w badaniu kontrolnym, które nie nakładają się na żaden segment pęknięcia w badaniu wyjściowym, ale są połączone z istniejącymi pęknięciami. Tempo wzrostu pęknięcia — mm na miesiąc lub mm na rok — jest obliczane poprzez podzielenie całkowitego przyrostu długości przez odstęp czasu między badaniami. Dla nawierzchni drogowych i lotniskowych typowe tempo wzrostu pęknięć wynosi od 0,5 do 5 mm na miesiąc, w zależności od obciążenia ruchem, warunków środowiskowych i nośności konstrukcji nawierzchni.
Wykrywanie nowych pęknięć
Wykrywanie nowych pęknięć identyfikuje piksele pęknięć lub obiekty pęknięć, które pojawiają się w badaniu kontrolnym, ale były nieobecne w badaniu wyjściowym. Wymaga to odróżnienia rzeczywistych nowych pęknięć od fałszywych pozytywów spowodowanych niewspółosiowością rejestracji, różnicami oświetlenia lub artefaktami wilgoci powierzchniowej. Proces wykrywania zazwyczaj obejmuje następujące kroki:
Generowanie wyjściowej maski pęknięć przy użyciu zweryfikowanego modelu wykrywania pęknięć o znanym wskaźniku fałszywych pozytywów. Maska wyjściowa powinna raczej konserwatywnie nadsegmentować niż niedosegmentować — uwzględnienie niepewnych kandydatów na pęknięcia zmniejsza ryzyko pominięcia nowych pęknięć, które były częściowo widoczne w badaniu wyjściowym.
Generowanie kontrolnej maski pęknięć przy użyciu tego samego modelu wykrywania pęknięć i tych samych parametrów przetwarzania zastosowanych do współzarejestrowanej ortomozai kontrolnej. Konsekwentne stosowanie algorytmu wykrywania jest niezbędne; zmiany w modelu wykrywania lub parametrach przetwarzania między epokami wprowadziłyby niefizyczne sygnały zmian.
Obliczanie maski zmian poprzez identyfikację pikseli, które są pęknięciem w masce kontrolnej, ale nie są pęknięciem w masce wyjściowej. Otwartie morfologiczne (erozja, a następnie dylatacja) usuwa izolowany szum pikselowy i cienkie artefakty na krawędziach pęknięć spowodowane subpikselową niewspółosiowością rejestracji.
Filtracja geometryczna eliminuje obiekty zmian, które nie spełniają kryteriów geometrii pęknięcia — minimalna długość (typowo >10 pikseli), minimalny współczynnik kształtu (stosunek długości do szerokości >3) i połączenie z istniejącymi sieciami pęknięć. Izolowane klastry pikseli, które nie tworzą cech liniowych, są klasyfikowane jako artefakty niebędące pęknięciami.
Walidacja poprzez inspekcję ręczną lub kontrolę naziemną dla próbki wykrytych zmian w celu skalibrowania wskaźnika fałszywych pozytywów i dostosowania parametrów wykrywania.
Minimalna wykrywalna szerokość nowego pęknięcia wynosi w przybliżeniu GSD obrazowania — typowo 1-2 mm dla badań pasów startowych. Pęknięcia węższe niż GSD mogą być nadal wykrywalne, jeśli wytwarzają mierzalną różnicę intensywności (kontrast) w obrazie, ale pewność detekcji maleje dla pęknięć o szerokości subpikselowej. Potok wykrywania zmian pęknięć TarmacView osiąga 90-95% wskaźnik wykrywalności dla nowych pęknięć szerszych niż 2 mm przy GSD 1 mm, z wskaźnikiem fałszywych pozytywów poniżej 5% dla typowych nawierzchni lotniskowych.
Wykrywanie zmian ubytków i korozji
Zmiana powierzchni ubytków
Ubytkowanie — fragmentacja i odrywanie materiału powierzchniowego z betonu lub muru — powoduje widoczne zagłębienia, odsłonięty kruszywo i ostre krawędzie na granicy między zdrowym a zdegradowanym materiałem. Wykrywanie zmian dla ubytków określa ilościowo wzrost powierzchni, głębokości i obwodu ubytku w czasie. W przeciwieństwie do wykrywania pęknięć, które operuje na cechach liniowych, wykrywanie ubytków wymaga dokładnego wyznaczenia granic nieregularnych cech obszarowych.
Wykrywanie zmian ubytków wykorzystuje porównanie oparte na segmentacji między epokami badań. Granica ubytku w każdej ortomozai jest wyznaczana ręcznie przez inspektorów, półautomatycznie przy użyciu interaktywnych narzędzi segmentacji (algorytmy grab cut, watershed lub aktywnego konturu) lub w pełni automatycznie przy użyciu modeli segmentacji głębokiego uczenia (Mask R-CNN, DeepLab lub UNet trenowany na zbiorach danych ubytków). Po wyodrębnieniu granic ubytków jako wielokątów w każdej epoce obliczane są metryki zmian:
Zmiana powierzchni = Powierzchnia_kontrolna - Powierzchnia_wyjściowa (typowo raportowana w cm² lub m²). Tempo wzrostu powierzchni = Zmiana powierzchni / odstęp czasu (cm²/miesiąc lub m²/rok). Zmiana obwodu mierzy złożoność granicy ubytku w miarę jej postępu w głąb wcześniej zdrowego materiału. Wzrost promieniowy mierzy maksymalną odległość od pierwotnej granicy ubytku do nowej granicy w dowolnym kierunku, wskazując kierunek najszybszej degradacji.
W przypadku konstrukcji betonowych tempo wzrostu ubytków różni się znacznie w zależności od mechanizmu przyczynowego. Ubytki spowodowane delaminacją wywołaną korozją rosną zazwyczaj w tempie 1-5 cm rozszerzenia promieniowego rocznie w agresywnych środowiskach. Ubytki spowodowane działaniem cykli zamrażania-rozmrażania wykazują sezonowe wzorce wzrostu skoncentrowane w zimie i wiośnie. Ubytki spowodowane uderzeniem lub przeciążeniem mają zazwyczaj nagły początek i mogą pozostać stabilne, jeśli przyczyna obciążenia zostanie usunięta.
Mapowanie rozprzestrzeniania korozji
Wykrywanie zmian korozji identyfikuje obszary, w których produkty korozji (rdza na stali, plamy utleniania na betonie) pojawiły się, rozprzestrzeniły lub nasiliły między epokami badań. Korozja objawia się charakterystycznym przebarwieniem — pomarańczowym, brązowym lub czerwono-brązowym na powierzchniach stalowych; plamami w kolorze rdzy na powierzchniach betonowych — które jest wykrywalne w obrazowaniu w widmie widzialnym. Sygnatura spektralna korozji różni się od większości innych cech powierzchni, umożliwiając stosunkowo solidną detekcję.
Obliczanie wskaźnika korozji przekształca obrazy RGB w metrykę wrażliwą na korozję. Typowe wskaźniki obejmują: stosunek czerwieni do zieleni (obszary skorodowane mają wyższy współczynnik odbicia czerwieni w stosunku do zieleni); znormalizowany wskaźnik korozji NCI = (Czerwony - Zielony) / (Czerwony + Zielony); oraz wskaźnik rdzy RI = (2 × Czerwony - Zielony - Niebieski) znormalizowany przez intensywność. Wskaźniki te są progowane w celu uzyskania binarnych map korozji w każdej epoce.
Zmiana pokrycia korozją to procentowy wzrost obszaru dotkniętego korozją w stosunku do całkowitej powierzchni. Dla mostów stalowych i elementów stalowych próg wykrywania zmian wynosi typowo 1-2% całkowitej powierzchni dla znaczącego postępu korozji. Dla powierzchni betonowych z plamami stosuje się mniejsze progi powierzchni (0,5-1%), ponieważ plamy są często bardziej rozproszone przestrzennie niż korozja wżerowa na stali.
Zmiana powagi korozji kategoryzuje postęp korozji według poziomu powagi zgodnie z normami takimi jak ISO 4628-3 (Farby i lakiery — Ocena degradacji powłok — Część 3: Stopień rdzy) lub SSPC-VIS 2 (Standard oceny stopnia rdzy na malowanych powierzchniach stalowych). Wykrywanie zmian przypisuje poziom powagi każdej plamie korozji w każdej epoce i oznacza plamy, które przeszły na wyższy poziom powagi między badaniami. Poziomy powagi opierają się na procentowej powierzchni dotkniętej rdzą: Ri0 (0%), Ri1 (<0,05%), Ri2 (0,05-0,5%), Ri3 (0,5-1%), Ri4 (1-5%), Ri5 (>5%) zgodnie z ISO 4628-3.
Wykrywanie zmian w chmurze punktów
Porównanie Cloud-to-Cloud (C2C)
Odległość Cloud-to-Cloud (C2C) to najprostsza metoda porównywania dwóch chmur punktów. Dla każdego punktu w chmurze referencyjnej znajdowany jest najbliższy sąsiad w chmurze docelowej i obliczana jest odległość euklidesowa między nimi. Wynikiem jest wartość odległości dla każdego punktu, która może być wizualizowana jako kolorowa mapa odległości, gdzie niebieski oznacza brak zmian (odległość bliska zeru), a czerwony oznacza dużą zmianę.
Zaletami C2C są wydajność obliczeniowa (O(n log n) z akceleracją kd-drzewa) i prostota koncepcyjna. Jednak C2C ma fundamentalne ograniczenia dla wykrywania zmian w infrastrukturze. Po pierwsze, mierzy najkrótszą odległość do dowolnego punktu w chmurze docelowej, a nie odległość w kierunku normalnym do powierzchni, co może znacznie zaniżać wielkość deformacji na nachylonych powierzchniach. Po drugie, C2C jest wrażliwe na zmiany gęstości punktów między chmurami — chmura o wyższej gęstości będzie systematycznie wykazywać mniejsze odległości najbliższego sąsiada niezależnie od fizycznej zmiany. Po trzecie, C2C nie zapewnia przedziału ufności dla pomiaru odległości, co utrudnia odróżnienie rzeczywistej deformacji od szumu pomiarowego.
Z tych powodów C2C najlepiej stosować jako szybką metodę przesiewową do identyfikacji obszarów potencjalnych zmian, a następnie przeprowadzić bardziej rygorystyczną analizę tych obszarów przy użyciu bardziej zaawansowanych metod. W praktyce C2C z progiem 2-3 razy większym od poziomu szumu chmury punktów zapewnia konserwatywny przegląd wykrywania zmian, który wychwytuje większość znaczących zmian, minimalizując jednocześnie fałszywe pozytywy wynikające z szumu i zmienności gęstości.
Wieloskalowe porównanie chmur modeli (M3C2)
M3C2 jest obecnie najnowocześniejszym algorytmem wykrywania zmian w chmurze punktów, opracowanym przez Lague, Brodu i Leroux (2013) i szeroko przyjętym w geomorfologii i monitorowaniu infrastruktury. M3C2 rozwiązuje ograniczenia C2C poprzez obliczanie odległości wzdłuż lokalnego kierunku normalnego do powierzchni w skali odpowiedniej do chropowatości powierzchni, ze statystycznie rygorystycznymi przedziałami ufności.
Algorytm M3C2 działa w następujący sposób:
Obliczanie wektora normalnego w każdym punkcie chmury referencyjnej poprzez dopasowanie płaszczyzny do lokalnego sąsiedztwa. Promień sąsiedztwa (D/2) jest wybierany tak, aby odpowiadał skali analizowanych cech powierzchni — mniejsze promienie dla cech drobnoziarnistych, takich jak pęknięcia, większe promienie dla szerokich wzorców deformacji. W monitorowaniu infrastruktury typowe promienie wahają się od 10 cm dla szczegółowej analizy pęknięć do 1 m dla ogólnej oceny deformacji.
Projekcja i obliczanie odległości wzdłuż kierunku normalnego. Dla każdego punktu w chmurze referencyjnej walec o promieniu d (skala projekcji) jest orientowany wzdłuż wektora normalnego. Punkty z obu chmur — referencyjnej i docelowej — które mieszczą się w tym walcu, są identyfikowane. Odległość między dwoma zestawami punktów wzdłuż kierunku normalnego jest obliczana jako różnica między ich średnimi pozycjami wzdłuż wektora normalnego. Skala projekcji d jest zazwyczaj ustawiana na 2-5 razy średni odstęp między punktami, aby zapewnić wystarczającą liczbę punktów do solidnego obliczenia średniej.
Estymacja przedziału ufności przy użyciu lokalnej chropowatości chmury punktów i liczby punktów. Algorytm M3C2 oblicza 95% przedział ufności (lub dowolny określony poziom ufności) dla pomiaru odległości w każdym punkcie, w oparciu o odchylenie standardowe punktów w walcu projekcji i liczbę punktów. Zmiany mniejsze niż przedział ufności nie są statystycznie istotne i nie powinny być interpretowane jako rzeczywista deformacja. Ta wbudowana statystyczna kontrola jakości jest kluczową zaletą M3C2 w porównaniu z prostszymi metodami.
Analiza wieloskalowa pozwala operatorowi analizować zmiany w wielu skalach przestrzennych jednocześnie. Analiza drobnoziarnista (małe D/2 i d) wykrywa małe cechy, takie jak otwieranie pęknięć i granice ubytków. Analiza gruboziarnista (duże D/2 i d) wykrywa szerokie deformacje, takie jak ugięcie mostu i różnicowe osiadanie. Porównanie wyników w różnych skalach może odróżnić zmiany powierzchniowe (erozja, depozycja, ubytkowanie) od deformacji (przemieszczenie konstrukcji, przechylenie, osiadanie).
W monitorowaniu infrastruktury M3C2 osiąga czułość detekcji 0,5-2 mm dla chmur punktów z naziemnego skanera laserowego (TLS) o gęstości przekraczającej 500 punktów/m². Dla fotogrametrycznych chmur punktów (które zazwyczaj mają więcej szumu niż dane TLS) czułość detekcji wynosi 2-5 mm w zależności od tekstury powierzchni, jakości obrazu i geometrii badania. Algorytm jest zaimplementowany w otwartym oprogramowaniu CloudCompare i jest standardową metodą wykrywania zmian w chmurze punktów w zastosowaniach infrastrukturalnych na całym świecie.
Metoda wykrywania zmian w chmurze punktów
Typowy próg detekcji
Przedział ufności
Najlepsze zastosowanie
C2C (Cloud-to-Cloud)
2-5 mm
Niedostępny
Szybki przegląd, wykrywanie dużych zmian
C2M (Cloud-to-Mesh)
1-3 mm
Częściowy
Analiza deformacji względem powierzchni referencyjnej
M3C2
0,5-2 mm (TLS), 2-5 mm (foto)
Tak (określany przez użytkownika)
Ilościowe monitorowanie deformacji, rygorystyczne wykrywanie zmian
PCA na cechach chmury punktów
2-10 mm
Statystyczne
Wykrywanie wzorców zmian, nie tylko wielkości
Cyfrowy model elewacji różnic (DOD)
DOD porównuje cyfrowe modele elewacji (DEM) lub cyfrowe modele powierzchni (DSM) wygenerowane z chmur punktów w każdej epoce badania. Dwa DEM są odejmowane, aby uzyskać raster różnicowy, w którym każda wartość piksela reprezentuje zmianę elewacji w tej lokalizacji. DOD jest wydajny obliczeniowo, ponieważ operuje na regularnych siatkach, a nie na nieustrukturyzowanych chmurach punktów, a wyniki są łatwe do wizualizacji i interpretacji jako mapy cieplne zmian elewacji.
Dokładność DOD zależy od jakości generowania DEM — interpolacja z nieregularnych chmur punktów do regularnych siatek wprowadza dodatkową niepewność. Poziom detekcji (LoD) dla DOD jest obliczany jako LoD = t × √(σ_wyjściowe² + σ_kontrolne²), gdzie σ jest niepewnością elewacji każdego DEM, a t jest wartością rozkładu t-Studenta dla pożądanego poziomu ufności (typowo t = 1,96 dla 95% ufności). DOD jest najbardziej odpowiedni do monitorowania zmian objętości masowych — utraty materiału przez erozję lub ubytkowanie, gromadzenia materiału przez osad lub gruz oraz osiadania lub podnoszenia na dużą skalę. Jest mniej odpowiedni do wykrywania uszkodzeń drobnoziarnistych, gdzie potrzebne są szczegóły poszczególnych pęknięć lub ubytków.
Częstotliwość powtarzalnych badań dronem
Określanie częstotliwości badań
Optymalny odstęp między powtarzalnymi badaniami do wykrywania zmian zależy od tempa degradacji, krytyczności składnika majątku, wymogów regulacyjnych i minimalnej wykrywalnej zmiany systemu pomiarowego. Podstawowa zasada jest taka, że odstęp między badaniami powinien być na tyle krótki, aby oczekiwana degradacja w tym przedziale przekraczała próg wykrywalności analizy zmian, ale na tyle długi, aby skumulowane zmiany były operacyjnie znaczące i ekonomicznie uzasadnione.
Dla nawierzchni lotniskowych zgodnie z ramami zgodności ICAO Annex 14 typowa częstotliwość badań wynosi:
Badania coroczne dla wszystkich nawierzchni operacyjnych (pasy startowe, drogi kołowania, płyty postojowe) w ramach rutynowego monitorowania stanu. Badania coroczne ustalają wyjściowe tempo degradacji i identyfikują obszary wymagające częstszej uwagi. ICAO Annex 14, Sekcja 10.2 wymaga, aby „powierzchnia nawierzchni była kontrolowana w regularnych odstępach czasu" oraz aby „częstotliwość kontroli była określana przez typ i natężenie ruchu oraz panujące warunki klimatyczne."
Badania kwartalne dla nawierzchni w złym stanie (PCI < 40) lub ze znaną aktywną degradacją. Kwartalne wykrywanie zmian śledzi skuteczność tymczasowego utrzymania i zapewnia wczesne ostrzeganie o szybkiej degradacji, która może wymagać interwencji strukturalnej.
Badania miesięczne dla nawierzchni objętych obserwacją pod kątem krytycznych uszkodzeń — pęknięć w pobliżu krawędzi nawierzchni, które mogą prowadzić do ubytkowania, obszarów aktywnego osiadania lub odcinków nawierzchni poddawanych operacjom o wysokim naprężeniu (np. końce pasów startowych, gdzie statki powietrzne zawracają i przykładają wysoki moment obrotowy).
Badania po zdarzeniach po ekstremalnych zjawiskach pogodowych (ulewne deszcze, cykle zamrażania-rozmrażania, ekstremalne upały), po nietypowych zdarzeniach obciążeniowych (przeciążone statki powietrzne, twarde lądowania) lub po interwencjach utrzymaniowych w celu weryfikacji skuteczności.
Dla konstrukcji mostowych interwały inspekcji są regulowane przez krajowe normy inspekcji mostów (np. NBIS w Stanach Zjednoczonych, DIN 1076 w Niemczech, wytyczne BASt w Europie). Rutynowe inspekcje wizualne są zazwyczaj przeprowadzane co dwa lata, ale badania wykrywania zmian dla znanych uszkodzeń mogą być prowadzone z różną częstotliwością:
Badania dwuletnie dla mostów w dobrym stanie bez znanych znaczących uszkodzeń. Ustalają one wyjściowe tempo degradacji do porównania z przyszłymi badaniami.
Badania coroczne dla mostów ze znanymi uszkodzeniami pod obserwacją — pęknięciami w krytycznych elementach, korozją w elementach stalowych, podatnością na wymycie lub ruchem w łożyskach.
Badania kwartalne do półrocznych dla mostów z aktywną degradacją monitorowaną pod kątem tempa postępu, weryfikacji po naprawie lub mostów z pozostałym okresem użytkowania poniżej 5 lat.
Wymogi spójności danych
Wiarygodne wykrywanie zmian w powtarzalnych badaniach wymaga starannej kontroli parametrów zbierania danych, aby zminimalizować niefizyczne różnice między epokami. Kluczowe wymogi spójności obejmują:
Terenowa odległość próbkowania (GSD) powinna być spójna między badaniami w granicach 10-20%. Znaczące zmiany GSD zmieniają rozdzielczość przestrzenną, w jakiej mierzone są uszkodzenia, i mogą wprowadzać pozorne zmiany, które są wyłącznie artefaktami różnic w rozdzielczości. Spójność GSD osiąga się poprzez latanie na tej samej wysokości z tym samym sensorem kamery we wszystkich epokach badań.
Warunki oświetleniowe powinny być tak spójne, jak to możliwe. Badania prowadzone w bezpośrednim świetle słonecznym wytwarzają ostre cienie od pęknięć i tekstury powierzchni, które różnią się od badań w oświetleniu zachmurzonym. Zalecaną praktyką jest przeprowadzanie wszystkich powtarzalnych badań w podobnych warunkach oświetleniowych — najlepiej przy zachmurzonym niebie z rozproszonym oświetleniem, które minimalizuje cienie i zapewnia najbardziej jednolity wygląd powierzchni do wykrywania uszkodzeń.
Wilgotność powierzchni powinna być spójna. Mokre nawierzchnie wyglądają znacząco inaczej niż suche — pęknięcia wypełniają się wodą i stają się mniej widoczne, plamy powierzchniowe wydają się ciemniejsze, a ogólny współczynnik odbicia maleje. Badania powinny być przeprowadzane tylko wtedy, gdy nawierzchnia jest sucha (minimum 48 godzin od ostatnich opadów deszczu dla betonu, 24 godziny dla asfaltu).
Parametry kamery i sensora — czas ekspozycji, przysłona, ISO, odległość ostrzenia — powinny być spójne. Automatyczne ustawienia ekspozycji (auto-ekspozycja, auto-ISO) powinny być wyłączone na rzecz stałych ustawień określonych podczas planowania badania, aby zapewnić spójną radiometrię obrazu między epokami.
Ścieżka lotu i nakładanie powinny podlegać temu samemu planowi misji we wszystkich epokach badań. Korzystanie z zaprogramowanych planów lotu z tymi samymi punktami nawigacyjnymi, wysokością, prędkością i ustawieniami nakładania zapewnia spójną geometrię widzenia, co upraszcza rejestrację i zmniejsza geometryczne różnice między badaniami.
Alerty wykrywania zmian
Konfiguracja progów alertów
Alerty wykrywania zmian przekształcają ilościowe pomiary zmian w powiadomienia z możliwością podjęcia działań dla zarządców infrastruktury. Progi alertów określają wielkość zmiany, która wyzwala powiadomienie, skategoryzowane według poziomu powagi, aby wspierać odpowiednie priorytetyzowanie reakcji. Konfiguracja progów zależy od typu uszkodzenia, krytyczności składnika majątku i kontekstu operacyjnego.
Dla alertów wzrostu pęknięć progi są zazwyczaj oparte na zwiększeniu szerokości pęknięcia:
Poziom obserwacji — zwiększenie szerokości pęknięcia o 0,3-0,5 mm między badaniami. Wskazuje na możliwe aktywne pękanie. Nie wymaga natychmiastowego działania, ale zaleca się zwiększenie częstotliwości monitorowania. Weryfikacja przez inspekcję naziemną podczas następnej zaplanowanej wizyty.
Poziom ostrzeżenia — zwiększenie szerokości pęknięcia o 0,5-1,5 mm między badaniami. Wskazuje na potwierdzone aktywne pękanie. Zalecana ocena inżynieryjna w celu określenia przyczyny i oceny implikacji strukturalnych. Zaplanuj szczegółową inspekcję w ciągu 30-60 dni.
Poziom alarmu — zwiększenie szerokości pęknięcia przekraczające 1,5 mm między badaniami (lub dowolna pojedyncza szerokość pęknięcia przekraczająca 5 mm, zgodnie z wytycznymi powagi ASTM D5340). Wskazuje na szybko postępującą degradację. Wymagana natychmiastowa ocena inżynieryjna. Ogranicz obciążenie, jeśli pęknięcie znajduje się w krytycznym elemencie konstrukcyjnym. Zaplanuj naprawę w ciągu 30 dni.
Dla alertów wzrostu ubytków progi są oparte na zwiększeniu powierzchni:
Poziom obserwacji — zwiększenie powierzchni ubytku o 10-25% w stosunku do stanu wyjściowego. Monitoruj w następnym cyklu badania.
Poziom ostrzeżenia — zwiększenie powierzchni ubytku o 25-50% lub zwiększenie głębokości ubytku przekraczające głębokość pokrycia. Zaplanuj szczegółową ocenę. Oceń pod kątem luźnego materiału, który może stać się FOD (ciałem obcym) w przypadku nawierzchni lotniskowych.
Poziom alarmu — zwiększenie powierzchni ubytku przekraczające 50% w stosunku do stanu wyjściowego lub dowolny nowy ubytek przekraczający 25 cm maksymalnego wymiaru na nawierzchniach lotniskowych (zgodnie z wytycznymi ICAO dotyczącymi ciał obcych). Wymagana natychmiastowa inspekcja naziemna. Usuń luźny materiał. Zaplanuj naprawę w ciągu 7-14 dni.
Dla alertów rozprzestrzeniania korozji progi są oparte na zmianie pokrycia i kategorii powagi:
Poziom obserwacji — zwiększenie pokrycia korozją o 5-15% dotkniętego obszaru lub progresja z Ri2 do Ri3 zgodnie z ISO 4628-3. Monitoruj w następnym badaniu.
Poziom ostrzeżenia — zwiększenie pokrycia korozją o 15-30% lub progresja z Ri3 do Ri4. Ocena inżynieryjna stanu powłoki i integralności podłoża. Zaplanuj ponowne powlekanie w ciągu 6-12 miesięcy.
Poziom alarmu — pokrycie korozją przekraczające 30% lub progresja do Ri5. Natychmiastowa ocena nośności konstrukcji. Dla stalowych elementów mostów ocena utraty przekroju przy użyciu ultradźwiękowego pomiaru grubości. Zaplanuj interwencję w ciągu 1-3 miesięcy.
Wielopoziomowe ramy alertów
Skuteczne alertowanie wykrywania zmian działa na wielu kaskadowych poziomach, aby uniknąć przytłaczania zarządców infrastruktury powiadomieniami, przy jednoczesnym zapewnieniu, że krytyczne zmiany nie zostaną pominięte:
Poziom 1 — Alert statystyczny uruchamia się, gdy wielkość zmiany przekracza próg statystyczny wyprowadzony z szumu pomiarowego. Jest to alert najniższego poziomu, wskazujący, że zaobserwowana zmiana jest statystycznie istotna (przekracza 95% przedział ufności systemu pomiarowego). Wiele alertów poziomu 1 jest spodziewanych podczas rutynowego monitorowania i nie wymagają natychmiastowej uwagi.
Poziom 2 — Alert operacyjny uruchamia się, gdy wielkość zmiany przekracza z góry określony próg, który doświadczenie wykazało jako wskazujący na aktywną degradację wymagającą uwagi. Alerty operacyjne są specyficzne dla każdego składnika majątku i typu uszkodzenia, skalibrowane na podstawie historycznych danych o degradacji i rejestrów utrzymania.
Poziom 3 — Alert krytyczny uruchamia się, gdy wielkość zmiany wskazuje na bezpośrednie zagrożenie bezpieczeństwa — szybki wzrost pęknięcia w krytycznym elemencie konstrukcyjnym, nagłe osiadanie przyczółka mostu lub rozwój ubytku, który może generować FOD na aktywnym pasie startowym. Alerty krytyczne wymagają natychmiastowego powiadomienia odpowiedzialnego personelu i przyspieszonej reakcji w ciągu godzin do dni.
Ramy alertów powinny również uwzględniać spójność czasową — zmiany, które utrzymują się lub narastają w wielu epokach badań, otrzymują wyższy priorytet niż izolowane zmiany, które nie postępują. Pęknięcie wykazujące wzrost 0,4 mm w jednym interwale badawczym, ale stabilizujące się w następnym, powinno zostać zdegradowane z ostrzeżenia do obserwacji, podczas gdy pęknięcie wykazujące stały wzrost 0,3-0,5 mm w każdym z trzech kolejnych badań powinno zostać eskalujowane.
Integracja z modelami degradacji
Od wykrywania zmian do przewidywania degradacji
Dane z wykrywania zmian stanowią empiryczną podstawę dla modeli degradacji, które przewidują przyszłe stany i pozostały okres użytkowania. Integracja wykrywania zmian z modelowaniem degradacji przekształca utrzymanie reaktywne — naprawianie uszkodzeń, gdy osiągną one stan krytyczny — w proaktywne planowanie utrzymania opartego na stanie, w którym interwencje są planowane na podstawie przewidywanych trajektorii degradacji.
Empiryczne krzywe degradacji są opracowywane poprzez nanoszenie wyników wykrywania zmian z wielu epok badań. Dla każdego typu uszkodzenia i elementu konstrukcyjnego tempo zmian (wzrost szerokości pęknięcia w mm/rok, wzrost powierzchni ubytku w cm²/rok, zwiększenie pokrycia korozją w %/rok) jest obliczane z szeregu czasowego pomiarów badawczych. Te empiryczne tempa są następnie używane do prognozowania przyszłych stanów przy założeniu kontynuacji degradacji w obserwowanym tempie. Dla nawierzchni lotniskowych krzywa degradacji wskaźnika stanu nawierzchni (PCI) jest zazwyczaj modelowana jako zanik wykładniczy: PCI(t) = PCI_początkowe × exp(-k × t), gdzie k jest stałą tempa degradacji wyprowadzoną z pomiarów wykrywania zmian w wielu cyklach badawczych.
Probabilistyczne modele degradacji uwzględniają niepewność zarówno w pomiarze, jak i przewidywaniu. Wykrywanie zmian dostarcza nie tylko wielkość zmiany, ale także przedział ufności dla tego pomiaru (z M3C2 lub ze statystycznej analizy zmian). Te niepewności propagują się do modelu degradacji, tworząc granice ufności dla przewidywanego przyszłego stanu. Model łańcucha Markowa, na przykład, wykorzystuje dane wykrywania zmian do oszacowania prawdopodobieństw przejścia między stanami, z przedziałami ufności odzwierciedlającymi niepewność pomiaru w każdej epoce.
Przewidywanie degradacji z wykorzystaniem uczenia maszynowego wykorzystuje sekwencję czasową pomiarów wykrywania zmian jako cechy do przewidywania przyszłego stanu. Rekurencyjne sieci neuronowe (RNN) i sieci LSTM (Long Short-Term Memory) są szczególnie odpowiednie do tego zadania, ponieważ uczą się wzorców czasowych bezpośrednio z sekwencji pomiarów badawczych. Cechy wejściowe obejmują szeregi czasowe szerokości pęknięć, szeregi czasowe powierzchni ubytków, wartości PCI i kowarianty środowiskowe (cykle temperatury, opady, zdarzenia zamrażania-rozmrażania). Wynikiem modelu jest przewidywany stan w przyszłych punktach czasowych z powiązanymi przedziałami przewidywania.
Pętla sprzężenia zwrotnego z działaniami utrzymaniowymi
Wykrywanie zmian umożliwia również ilościową ocenę skuteczności utrzymania poprzez porównanie przed i po. Gdy uszkodzenie jest naprawione — pęknięcie uszczelnione, ubytek wypełniony, korozja zabezpieczona — analiza wykrywania zmian między badaniem przed naprawą a pierwszym badaniem po naprawie weryfikuje, że uszkodzenie nie jest już obecne. Kolejne badania śledzą, czy naprawa pozostaje skuteczna, czy uszkodzenie nawraca.
Śledzenie trwałości napraw w wielu cyklach badawczych dostarcza danych o średnim czasie do ponownego pojawienia się uszkodzeń po różnych metodach naprawy. Dane te wspomagają planowanie utrzymania poprzez identyfikację najbardziej trwałych strategii naprawczych dla każdego typu uszkodzenia w określonych warunkach środowiskowych i obciążeniowych. Na przykład, jeśli wykrywanie zmian ujawni, że uszczelnianie pęknięć na określonym odcinku pasa startowego ma medianę czasu nawrotu 18 miesięcy, podczas gdy frezowanie i uszczelnianie ma medianę czasu nawrotu 36 miesięcy, wyższy koszt początkowy frezowania i uszczelniania jest uzasadniony wydłużonym okresem użytkowania.
Kontrakty utrzymaniowe oparte na wydajności wykorzystują dane wykrywania zmian do weryfikacji, czy wykonawcy utrzymania osiągnęli określone wyniki wydajnościowe. Kontrakt może określać, że szerokość pęknięć w leczonych obszarach nie może przekraczać 125% szerokości po naprawie przez co najmniej 24 miesiące. Badania wykrywania zmian po 6, 12 i 24 miesiącach od naprawy zapewniają obiektywną weryfikację zgodności, przy czym płatność jest uzależniona od wykazanej wydajności, a nie tylko od wykonania prac.
Oprogramowanie i automatyzacja wykrywania zmian
Narzędzia komercyjne i open-source
CloudCompare jest głównym oprogramowaniem open-source do wykrywania zmian w chmurze punktów, implementującym metody M3C2, C2C, C2M (Cloud-to-Mesh) i DOD. Obsługuje formaty LAS, LAZ, PLY i inne popularne formaty chmur punktów, zapewnia przetwarzanie wsadowe dla zautomatyzowanych potoków i zawiera narzędzia wizualizacyjne dla kolorowych map zmian. CloudCompare działa na Windows, macOS i Linux i jest de facto standardem do analizy zmian w chmurze punktów w monitorowaniu infrastruktury.
Agisoft Metashape obsługuje porównywanie ortomozai i DEM do wykrywania zmian poprzez swój przepływ pracy do obliczania różnic między przetworzonymi projektami. Oprogramowanie zapewnia automatyczną rejestrację obrazów między badaniami przy użyciu wspólnej sieci GCP, a powstałe ortomozai mogą być porównywane piksel po pikselu lub za pomocą wbudowanego narzędzia różnicowania DEM. Python API Metashape umożliwia skryptowanie przepływów pracy wykrywania zmian do wsadowego przetwarzania wielu par badań.
Pix4Dmapper i Pix4Dmatic zawierają możliwości porównywania ortomozai i DSM, z automatycznymi raportami wykrywania zmian, które podświetlają obszary znaczącej różnicy elewacji. Raport jakości Pix4D zawiera oszacowania dokładności na piksel, które informują o istotności statystycznej wykrytych zmian.
TarmacView zapewnia specjalistyczne wykrywanie zmian dla infrastruktury nawierzchni lotniskowych, porównując ortomozai i mapy pęknięć w powtarzalnych badaniach z automatyczną klasyfikacją zmian. Platforma śledzi wzrost pęknięć (szerokość i długość), tworzenie nowych pęknięć, zmiany powierzchni ubytków i trendy degradacji PCI. Wyniki wykrywania zmian są wizualizowane jako mapy nakładek na bieżącej ortomozai, z kolorowymi oznaczeniami powagi zmian i automatycznym generowaniem alertów dla zmian przekraczających konfigurowalne progi.
Zautomatyzowane potoki przetwarzania
Pełna automatyzacja wykrywania zmian wymaga zintegrowanego potoku, który obsługuje wszystkie etapy przetwarzania, od pozyskiwania danych do generowania raportów:
Krok 1 — Pozyskiwanie danych: Importuj nowe dane badawcze (obrazy, dzienniki GNSS, współrzędne GCP) i pobierz odpowiadające im dane badawcze wyjściowe z bazy danych składników majątku. Sprawdź, czy oba badania obejmują ten sam obszar składnika majątku i spełniają wymagania jakościowe.
Krok 2 — Rejestracja: Wykonaj automatyczną rejestrację nowej ortomozai lub chmury punktów do odniesienia wyjściowego. Dla ortomozai użyj rejestracji opartej na cechach z SIFT lub AKAZE, a następnie precyzyjnej rejestracji opartej na intensywności. Dla chmur punktów zastosuj rejestrację zgrubną przy użyciu GCP lub ICP (Iterative Closest Point), a następnie rejestrację precyzyjną.
Krok 3 — Obliczanie zmian: Zastosuj wybraną metodę wykrywania zmian — różnicowanie obrazów dla zmian intensywności, M3C2 dla deformacji chmury punktów, porównanie obiektowe dla zmian pęknięć i ubytków. Oblicz statystyki zmian z przedziałami ufności.
Krok 4 — Klasyfikacja: Klasyfikuj wykryte zmiany według typu (wzrost pęknięcia, nowe pęknięcie, rozprzestrzenianie ubytku, korozja, deformacja), poziomu powagi i lokalizacji przestrzennej. Przypisz każdy obiekt zmiany do odpowiedniego komponentu składnika majątku.
Krok 5 — Generowanie alertów: Porównaj wielkości zmian ze skonfigurowanymi progami dla każdego typu uszkodzenia i lokalizacji. Generuj alerty poziomu 1, 2 lub 3, stosownie do sytuacji. Zapisz alerty w systemie zarządzania składnikami majątku z odniesieniem przestrzennym, wielkością zmiany, przedziałem ufności i znacznikiem czasu.
Krok 6 — Generowanie raportów: Wyprodukuj raporty wykrywania zmian zawierające mapy zmian (nakładka na bieżącą ortomozaię), statystyki podsumowujące (całkowita zmiana długości pęknięć, liczba nowych uszkodzeń, trend PCI), szczegółowe dane zmian dla poszczególnych uszkodzeń (historia szerokości pęknięcia, historia powierzchni ubytku) oraz zalecane działania w oparciu o poziomy alertów.
Krok 7 — Aktualizacja bazy danych: Zaktualizuj bazę danych stanu składnika majątku o nowe wyniki wykrywania zmian. Dołącz dane szeregów czasowych dla każdego uszkodzenia i elementu składnika majątku. Zaktualizuj krzywe degradacji o nowy punkt pomiarowy. Ponownie oblicz przewidywany stan i pozostały okres użytkowania, jeśli modele degradacji są zintegrowane.
Zapewnienie jakości dla zautomatyzowanego wykrywania zmian
Zautomatyzowane wykrywanie zmian wymaga systematycznego zapewnienia jakości, aby upewnić się, że raportowane zmiany są rzeczywiste, a nie artefaktami błędów przetwarzania:
Kontrola jakości rejestracji: RMSE rejestracji między badaniami musi być poniżej progu projektu (typowo 0,5 piksela dla ortomozai, 0,5 cm dla chmur punktów). Jeśli jakość rejestracji jest niewystarczająca, wyniki wykrywania zmian są oznaczane do przeglądu ręcznego.
Przesiewanie fałszywych pozytywów: Wyniki wykrywania zmian są przesiewane pod kątem znanych wskaźników braku zmian: obszarów stojącej wody (wykrywanych przez obrazowanie w bliskiej podczerwieni lub termiczne), obszarów niedawnego utrzymania (zarejestrowanego w systemie zarządzania składnikami majątku) oraz obszarów ze znanym zanieczyszczeniem powierzchni (wycieki oleju, nalot gumy na pasach startowych).
Kontrola spójności czasowej: Zmiany, które pojawiają się w pojedynczym interwale badawczym, ale nie są potwierdzone w kolejnych badaniach, są oznaczane jako potencjalnie przejściowe — plamy powierzchniowe, które zmywa deszcz, wzory wilgoci zmieniające się z pogodą lub gruz, który jest usuwany. Trwałe zmiany otrzymują wyższe oceny ufności.
Próbka do przeglądu ręcznego: Statystycznie ważna próbka wykrytych zmian jest sprawdzana przez wykwalifikowanego inspektora dla każdego cyklu badawczego. Wielkość próbki jest obliczana tak, aby osiągnąć 95% ufności, że wskaźnik fałszywych pozytywów systemu zautomatyzowanego jest poniżej dopuszczalnego progu (typowo 5-10% dla alertów poziomu obserwacji, 1-2% dla alertów poziomu alarmu).
Podsumowanie
Wykrywanie zmian przekształca inspekcję infrastruktury ze statycznej migawki stanu w dynamiczny czasowy zapis degradacji, napraw i zachowania strukturalnego. Poprzez precyzyjną współrejestrację obrazów i chmur punktów z powtarzalnych badań, wykrywanie zmian określa ilościowo subtelny, milimetrowy postęp pęknięć, ubytków, korozji i deformacji, który byłby niewidoczny w pojedynczej inspekcji, ale skumulowany w czasie decyduje o okresie użytkowania składnika majątku.
Metodologia integruje rygorystyczną rejestrację geometryczną — opartą na cechach, intensywności lub georeferencyjną z wykorzystaniem GCP — ze statystyczną analizą zmian, która oddziela rzeczywistą degradację od szumu pomiarowego. Wybór metody wykrywania zmian zależy od typu uszkodzenia i wymaganej czułości: różnicowanie obrazów dla zmian wyglądu powierzchni, M3C2 dla deformacji chmury punktów, porównanie obiektowe dla zmian geometrii pęknięć i ubytków oraz metody uczenia maszynowego do automatycznej klasyfikacji z wysoką dokładnością.
Dla nawierzchni lotniskowych, mostów i infrastruktury krytycznej wykrywanie zmian stanowi podstawę danych dla utrzymania opartego na stanie, modelowania degradacji i alokacji budżetu opartej na ryzyku. Umożliwia zarządcom infrastruktury identyfikację przyspieszającej degradacji, zanim osiągnie ona poziomy krytyczne, weryfikację skuteczności interwencji utrzymaniowych oraz optymalizację terminu i zakresu działań naprawczych. Integracja wykrywania zmian z zautomatyzowanymi potokami przetwarzania, ramami alertów i modelami degradacji tworzy zamkniętą pętlę systemu zarządzania stanem, który stale poprawia jakość decyzji utrzymaniowych poprzez empiryczne dowody tempa degradacji i trwałości napraw.
TarmacView implementuje wykrywanie zmian jako podstawową funkcjonalność swojej platformy do inspekcji nawierzchni lotniskowych, umożliwiając automatyczne śledzenie wzrostu pęknięć, rozprzestrzeniania ubytków i trendów stanu w kolejnych inspekcjach dronem. Platforma stosuje rygorystyczną rejestrację i statystyczną kontrolę jakości, aby zapewnić, że raportowane zmiany są rzeczywiste i możliwe do podjęcia działań, dostarczając zarządcom infrastruktury ilościowych dowodów do planowania utrzymania i raportowania zgodności z normami ICAO Annex 14 i ASTM D5340.
Najczęściej Zadawane Pytania
Wykrywanie zmian to technika analizy czasowej, która porównuje współzarejestrowane obrazy, ortomozai lub chmury punktów tego samego składnika infrastruktury wykonane w różnych momentach. Identyfikuje i określa ilościowo różnice, takie jak nowe pęknięcia, wzrost pęknięć, powiększanie ubytków, rozprzestrzenianie korozji, deformację powierzchni i osiadanie. Proces wymaga precyzyjnej rejestracji obrazów lub wyrównania chmur punktów, aby tylko rzeczywiste zmiany fizyczne — a nie artefakty niewspółosiowości — pojawiały się w analizie różnic.
Dla wykrywania zmian na poziomie pikseli dokładność rejestracji powinna być subpikselowa — typowo poniżej 0,5 piksela RMSE. Przy terenowej odległości próbkowania (GSD) wynoszącej 1 mm/piksel przekłada się to na dokładność rejestracji 0,5 mm. Błędy rejestracji większe niż 1 piksel powodują fałszywe sygnały zmian na krawędziach i granicach tekstur, które mogą przytłoczyć rzeczywiste zmiany uszkodzeń. Rejestracja oparta na cechach z wykorzystaniem niezmienników skali i odrzucania wartości odstających RANSAC rutynowo osiąga dokładność 0,3-0,8 piksela. Geotagowanie RTK/PPK w połączeniu z GCP umożliwia spójną rejestrację subpikselową w powtarzalnych badaniach.
Wykrywanie zmian pęknięć zazwyczaj łączy analizę na poziomie pikseli i obiektów. Metody na poziomie pikseli wykrywają zmiany gęstości pikseli pęknięć w lokalnych sąsiedztwach pomiędzy kolejnymi pomiarami. Metody na poziomie obiektów najpierw wektoryzują pęknięcia w każdej epoce badania, a następnie porównują mapy pęknięć, obliczając zmiany szerokości w dopasowanych lokalizacjach, wydłużenie istniejących pęknięć oraz gęstość nowych pęknięć. Moduł LTCCD (Lie-group-based Temporal Crack Change Detection) oraz metody sterowane PDE to zaawansowane podejścia, które śledzą ewolucję pęknięć z precyzją subpikselową poprzez modelowanie granic pęknięć jako propagujących frontów.
Multiscale Model-to-Model Cloud Comparison (M3C2) to statystycznie rygorystyczny algorytm do obliczania odległości między dwiema chmurami punktów. W przeciwieństwie do prostych metod najbliższego sąsiada, M3C2 oblicza odległości wzdłuż lokalnego kierunku normalnego do powierzchni w wielu skalach, zapewniając przedziały ufności dla każdego pomiaru odległości. Uwzględnia chropowatość chmury punktów, zmienność gęstości i niepewność rejestracji. M3C2 to standardowa metoda monitorowania deformacji z powtarzalnych badań LiDAR lub fotogrametrycznych, osiągająca czułość poniżej milimetra, gdy gęstość chmury punktów przekracza 500 punktów/m².
Częstotliwość badań zależy od tempa degradacji, krytyczności składnika majątku i wymogów regulacyjnych. W przypadku nawierzchni lotniskowych zgodnie z ICAO Annex 14 inspekcje wizualne są zazwyczaj coroczne, ale badania wykrywania zmian dla stref aktywnej degradacji mogą być kwartalne lub miesięczne. Płyty mostowe ze znanymi pęknięciami mogą być badane co 6 miesięcy podczas aktywnej degradacji i co 2-3 lata w ramach rutynowego śledzenia stanu. Minimalna wykrywalna zmiana wynosi około 2,5-3 razy dokładność badania (95% ufności), dlatego częstotliwość badań powinna być skalibrowana tak, aby oczekiwana degradacja w danym przedziale przekraczała próg wykrywalności.
Alerty wykrywania zmian wykorzystują wielopoziomowe progi: (1) progi wielkości zmian na poziomie pikseli do filtrowania szumów; (2) minimalne progi powierzchni klastrowania przestrzennego do eliminacji izolowanych artefaktów pikselowych; (3) kontrole spójności czasowej wymagające, aby zmiany utrzymywały się lub narastały w wielu badaniach; oraz (4) klasyfikacja powagi (np. wzrost szerokości pęknięcia >0,5 mm wyzwala obserwację, >1,5 mm wyzwala alarm). Alerty są zazwyczaj konfigurowane według typu uszkodzenia — alerty wzrostu pęknięć wykorzystują progi wzrostu szerokości, alerty ubytków wykorzystują progi wzrostu powierzchni, a alerty deformacji wykorzystują progi wielkości przemieszczenia.
Tak. Procesy wykrywania zmian zazwyczaj klasyfikują wykryte zmiany do trzech kategorii: (1) nowe uszkodzenia — obszary, które zostały sklasyfikowane jako zdrowe w badaniu wyjściowym, ale wykazują piksele pęknięć lub ubytków w badaniu kontrolnym; (2) pogłębiające się uszkodzenia — istniejące pęknięcia, które zwiększyły swoją szerokość, długość lub gęstość; oraz (3) naprawione uszkodzenia — obszary, w których wcześniej zidentyfikowane uszkodzenia nie są już obecne po konserwacji. Ta klasyfikacja wymaga precyzyjnej współrejestracji map uszkodzeń pomiędzy epokami badań, zazwyczaj przy użyciu zwektoryzowanych sieci pęknięć lub pikselowych etykiet uszkodzeń z korespondencją czasową.
Kilka platform wspiera wykrywanie zmian w infrastrukturze: CloudCompare (open-source) implementuje algorytmy M3C2, C2C i C2M do porównywania chmur punktów; Metashape i Pix4D obsługują porównywanie ortomozai i różnicowanie NMT; Cyclone Register 3D i FARUS Scene obsługują analizę szeregów czasowych LiDAR. TarmacView zapewnia specjalistyczne wykrywanie zmian dla nawierzchni lotniskowych, porównując ortomozai i mapy pęknięć w powtarzalnych badaniach z automatyczną klasyfikacją zmian, pomiarem wzrostu pęknięć i analizą trendów zgodnie z ASTM D5340 i wytycznymi ICAO.
Automatyczne wykrywanie zmian dla infrastruktury
TarmacView umożliwia automatyczne wykrywanie zmian w powtarzalnych inspekcjach dronem nawierzchni lotniskowych, mostów i infrastruktury. Śledź wzrost pęknięć, powiększanie ubytków i trendy degradacji z precyzją ilościową. Wykrywaj zmiany wcześnie i optymalizuj planowanie utrzymania.
Wykrywanie pęknięć za pomocą AI w inspekcji infrastruktury
Wykrywanie pęknięć oparte na AI wykorzystuje widzenie komputerowe — konwolucyjne sieci neuronowe, transformery wizyjne i modele segmentacji semantycznej — do au...
Sezonowe monitorowanie śledzi, jak zmieniają się wraz z porami roku strukturalna odpowiedź nawierzchni (ugięcia FWD, moduły) oraz stan powierzchni (spękania, ko...
20 min czytania
Pavement testing
Pavement inspection
+3
Zgoda na Pliki Cookie Używamy plików cookie, aby poprawić jakość przeglądania i analizować nasz ruch. See our privacy policy.