Planowanie lotów dronów do inspekcji infrastruktury
Planowanie lotów dronów do inspekcji infrastruktury obejmuje projektowanie zautomatyzowanych tras lotu (misji punktów nawigacyjnych) z odpowiednią wysokością, prędkością, zakładką, kątem gimbala i ustawieniami kamery, aby rejestrować spójne, wysokiej jakości obrazy inspekcyjne. Obejmuje typy misji, oprogramowanie, optymalizację parametrów, śledzenie terenu, przepisy dotyczące przestrzeni powietrznej oraz procedury przedlotowe.
Planowanie lotów dronów do inspekcji infrastruktury
Cel planowania lotów dronów i oprogramowanie
Planowanie lotów dronów do inspekcji infrastruktury to ustrukturyzowany proces przekształcania specyfikacji produktu końcowego w powtarzalny lot, który rejestruje odpowiednie dane za pierwszym razem. Główne cele to zapewnienie jakości danych poprzez jednolitą wielkość próbkowania terenu (GSD), wystarczającą zakładkę i odpowiednie ustawienia kamery do rekonstrukcji fotogrametrycznej; bezpieczeństwo poprzez unikanie przeszkód, utrzymywanie wizualnej linii widzenia (VLOS), przestrzeganie granic przestrzeni powietrznej i programowanie zabezpieczeń; powtarzalność dzięki wystandaryzowanym misjom, które zapewniają spójne dane w wielu lotach dla okresowych inspekcji; oraz wydajność poprzez minimalizację czasu lotu i zużycia baterii przy jednoczesnym osiągnięciu pełnego pokrycia.
Jak zauważa SPH Engineering, udana misja to w 90 procentach planowanie, a w 10 procentach wykonanie. Globalny rynek oprogramowania do planowania lotów dronów był wyceniany na około 259 milionów dolarów w 2025 roku i prognozuje się, że osiągnie 449 milionów dolarów do 2032 roku, co oznacza średnioroczny wzrost (CAGR) na poziomie 8,3 procent, napędzany rosnącym wykorzystaniem UAV do inspekcji infrastruktury w sektorach lotnictwa, energetyki, budownictwa i transportu.
Oprogramowanie do planowania lotów
Pix4Dcapture to bezpłatna aplikacja mobilna na iOS i Android obsługująca misje typu siatka, podwójna siatka, korytarz, okrężna (orbitalna) i swobodny lot. Przetwarza dane za pomocą Pix4Dmatic, Pix4Dmapper lub Pix4Dcloud, z typowymi domyślnymi ustawieniami zakładki 75–85 procent wzdłużnej i 60–70 procent poprzecznej. Obsługuje świadomość terenu dzięki wstępnie załadowanym numerycznym modelom terenu (DEM). Oprogramowanie jest najlepiej dostosowane do kompleksowych przepływów prac fotogrametrycznych — od planowania misji po generowanie chmury punktów i tworzenie ortofotomap.
DJI Pilot 2 to oficjalna aplikacja lotnicza dla dronów Enterprise DJI, w tym Matrice 300/350 RTK, Matrice 3D/3TD, serii Mavic 3 Enterprise oraz Matrice 30/M30T. Obsługuje śledzenie terenu z niestandardowym importem DTM/GeoTIFF i wymaga pozycjonowania RTK do śledzenia terenu w niektórych wersjach oprogramowania układowego, z minimalną wysokością 25 metrów AGL nad DSM. Aktualizacja oprogramowania układowego DJI Enterprise z marca 2023 roku wprowadziła śledzenie terenu w czasie rzeczywistym obsługujące wysokości od 30 do 200 metrów AGL. DJI Pilot 2 akceptuje pliki misji KMZ eksportowane z planistów innych firm i wyświetla wysokość nad poziomem morza obliczoną z użyciem modelu geoidy EGM96. Jest najlepiej dostosowany do ekosystemu DJI Enterprise i precyzyjnych lotów z RTK.
DroneDeploy to platforma chmurowa oferująca pełny przepływ pracy od planowania lotu po przetwarzanie i analizę. Wykorzystuje dane DEM do dostosowania wysokości dla stałego AGL z zalecaną zakładką 70 procent z przodu i 60 procent z boku jako domyślną dla mapowania. Obsługuje platformy DJI, Autel, Skydio i inne, a także oferuje integrację LAANC do autoryzacji przestrzeni powietrznej. DroneDeploy jest najlepiej dostosowany dla zespołów operacyjnych typu end-to-end w budownictwie i rolnictwie.
UgCS (Universal Ground Control Software) firmy SPH Engineering to desktopowa platforma do planowania lotów obsługująca autopiloty DJI, ArduPilot i PX4. Jej narzędzie fotogrametryczne oblicza linie lotu, interwały wyzwalania migawki i punkty nawigacyjne śledzenia terenu na podstawie specyfikacji kamery i pożądanego GSD. UgCS zawiera dedykowane narzędzie korytarzowe do fotogrametrii dla obiektów liniowych, planowanie lotów LiDAR z wzorcami kalibracyjnymi, wizualizację misji 3D na tle importowanych przeszkód KML/KMZ oraz wbudowany symulator lotu do weryfikacji przed lotem. Dostępny w licencjach PRO, EXPERT i ENTERPRISE, UgCS jest używany przez ponad 5000 zespołów dronów na całym świecie i jest najlepszy do złożonych profesjonalnych misji z wykorzystaniem LiDAR, magnetometrii i prac badawczych.
Mission Planner to otwarta stacja naziemna dla autopilotów ArduPilot, obsługująca misje punktów nawigacyjnych, pomiarowe (siatka), korytarzowe i automatyczne z pełnym monitorowaniem telemetrii MAVLink, konfiguracją geofence oraz ustawieniami RTL/zabezpieczeń/śledzenia terenu. Jest najlepiej dostosowany dla platform open-source ArduPilot i PX4 oraz niestandardowych konstrukcji UAV.
Litchi to aplikacja mobilna dla konsumenckich dronów DJI oferująca misje punktów nawigacyjnych z pełną kontrolą nad wysokością, prędkością, kierunkiem i pochyleniem gimbala, tryb orbity POI, tryb fokusu, eksport/import CSV oraz udostępnianie misji w chmurze za pośrednictwem Litchi Hub. Jest najlepiej dostosowany do kinematografii i półautomatycznych inspekcji na konsumenckich platformach DJI.
Inne godne uwagi platformy to Dronelink (wieloplatformowy planista misji dla DJI i Autel), Skydio Autonomy (skanowanie 3D, misje orbitalne i korytarzowe z aktywnym omijaniem przeszkód), Auterion Mission Control (komercyjne zarządzanie flotą), DroneBlocks (programowanie wizualne dla zautomatyzowanych lotów inspekcyjnych mostów) oraz Propeller Aero (przetwarzanie w chmurze z planowaniem misji śledzenia terenu).
Typy misji
Misje siatki 2D
Misje siatki 2D są podstawą mapowania lotniczego i inspekcji. Dron leci równoległymi liniami lotu w obrębie zdefiniowanego obszaru wielokąta z kamerą skierowaną prosto w dół pod kątem nadiru (pochylenie gimbala -90 stopni). Misje te produkują obrazy ortofotomap, które są geometrycznie korygowanymi zdjęciami lotniczymi zszytymi w jedną bezszwową mapę. Są wykorzystywane do pomiarów geodezyjnych, monitorowania placów budowy, pomiarów hałd oraz inspekcji pomostów mostowych.
Podwójna siatka (double grid) lub misje krzyżowe wykonują prostopadłe przeloty (północ-południe, a następnie wschód-zachód), znacznie poprawiając rekonstrukcję 3D poprzez rejestrację ukośnych kątów na każdym przelocie. Ta technika jest niezbędna, gdy produkt końcowy wymaga pełnego modelu 3D, a nie prostej ortofotomapy. Typowe parametry dla misji podwójnej siatki to 80 procent zakładki wzdłużnej na obu przelotach i 70 procent zakładki poprzecznej.
Nieregularne granice są obsługiwane przez większość planistów poprzez rysowanie wielokątów bezpośrednio na interfejsie mapy, co pozwala operatorowi na zdefiniowanie precyzyjnych granic obszaru i wykluczenie stref zakazu lotu lub przeszkód w obrębie większego terenu.
Misje korytarzowe / liniowe
Misje korytarzowe podążają za linią środkową polilinii, a dron wykonuje równoległe przeloty o zdefiniowanej szerokości korytarza, typowo od 10 do 500 metrów, w zależności od obiektu i wymaganej rozdzielczości. Misje te są wykorzystywane do inspekcji rurociągów, inspekcji linii energetycznych, pomiarów dróg i kolei, mapowania rzek oraz inspekcji pasów startowych. Typ misji korytarzowej jest niezbędny dla infrastruktury liniowej, gdzie standardowa siatka marnowałaby znaczący czas lotu na pokrywanie dużych obszarów nieistotnego terenu.
Narzędzie UgCS Photogrammetry Corridor oraz tryb korytarzowy DroneDeploy są zaprojektowane specjalnie dla tego typu misji. Dla szerokich korytarzy może być wymaganych wiele równoległych przelotów, w zależności od pożądanego GSD i specyfikacji matrycy kamery.
Misje orbitalne / POI
Misje orbitalne lub Point of Interest (POI) polegają na locie drona po okręgu wokół zdefiniowanego punktu centralnego. Są wykorzystywane do inspekcji wież (wież komórkowych, turbin wiatrowych, kominów), filarów mostów oraz elementów budynków wymagających pokrycia inspekcyjnego 360 stopni. Kluczowe parametry obejmują promień orbity (odległość od punktu centralnego), liczbę punktów nawigacyjnych (większa liczba zapewnia gładsze ścieżki okrężne), kierunek (zawsze zwrócony do środka, zgodny ze styczną ścieżki lub stały kierunek) oraz pochylenie gimbala (zwykle -45 stopni dla ukośnych widoków POI).
Tryb helisy to wariant, w którym dron wznosi się spiralnie od wysokości początkowej do końcowej, używany do inspekcji całej wysokości wież i turbin wiatrowych od podstawy do gondoli. Parametry obejmują wysokość początkową, wysokość końcową oraz pionową odległość kroku między każdą pętlą.
Misje mapowania elewacji
Misje mapowania elewacji polegają na locie drona równolegle do ściany budynku w pionowym zygzakowatym wzorze (wzór koszący) do inspekcji zewnętrznych części budynków i oceny elewacji wysokościowców. Operator rysuje polilinię wzdłuż podstawy budynku, a dron skanuje w górę pionowymi pasami. Kąt gimbala jest ustawiony na około 0 stopni (poziomo) skierowany bezpośrednio na powierzchnię budynku.
W przypadku wysokich konstrukcji wykonuje się wiele przelotów orbitalnych na różnych poziomach wysokości. Kluczowe parametry obejmują odległość od obiektu (5–20 metrów), pionowy odstęp między przelotami (5–15 metrów dla 60–70 procent zakładki pionowej) oraz prędkość lotu (1–3 metry na sekundę). Wideogrametria — wyodrębnianie klatek z wideo 4K nagranego z minimalną częstotliwością 30 kl./s — tworzy teksturowane siatki 3D dla wymiernych modeli. Badania kosztów pokazują, że inspekcja elewacji dronem kosztuje zazwyczaj 60 do 80 procent mniej niż alternatywy z rusztowaniem w przypadku budynków średniej wysokości.
Misje 3D z punktami nawigacyjnymi
Misje 3D z punktami nawigacyjnymi zapewniają najwyższy poziom kontroli w przypadku złożonych inspekcji, gdy automatyczne wzory siatki lub korytarza są niewystarczające. Każdy punkt nawigacyjny niezależnie definiuje szerokość i długość geograficzną, wysokość, kierunek, pochylenie gimbala i akcję kamery. Misje mogą obejmować interpolację ścieżki krzywych dla płynnych zakrętów między punktami nawigacyjnymi. Eksport i import są obsługiwane poprzez KML, CSV lub zastrzeżone formaty plików punktów nawigacyjnych w Litchi, UgCS, Mission Planner (.waypoints) i DJI Pilot 2 (KMZ).
Misje panoramiczne
Dron zawisa w jednym miejscu i obraca się, aby uchwycić sferyczną panoramę 360 stopni. Parametry obejmują liczbę zdjęć na rząd (np. 8 zdjęć co 45 stopni) i kąty pochylenia. Misje te są wykorzystywane do dokumentacji przeglądowej i wirtualnych spacerów.
Ustawienia parametrów
Wielkość próbkowania terenu (GSD)
GSD to odległość między dwoma kolejnymi środkami pikseli mierzona na gruncie. Jest to podstawowy parametr rozdzielczości dla wszystkich misji fotogrametrycznych. Standardowy wzór według Pix4D to:
GSD = (H × SW) / (F × ImW)
Gdzie H to wysokość lotu nad terenem w metrach, SW to szerokość matrycy w milimetrach, F to ogniskowa w milimetrach, a ImW to szerokość obrazu w pikselach. Równoważny uproszczony wzór to:
GSD = (Wysokość lotu × Rozmiar piksela) / Ogniskowa
Praktyczne standardy GSD dla inspekcji infrastruktury:
Zastosowanie
Wymagane GSD
Wykrywanie pęknięć na elewacjach
0,5–1 cm/piksel
Szczegółowość na poziomie wad elewacji
2 cm/piksel
Ocena stanu pomostu mostu
3 cm/piksel
Obliczenia objętości wykopów/nasypów
5 cm/piksel
Szacowanie hałd
7–10 cm/piksel
Ważnym czynnikiem jest to, że nawet przy stałej wysokości lotu, różnice w elewacji terenu i zmiany kąta kamery powodują zmienność GSD w obszarze projektu. Pix4D oblicza średnie GSD dla końcowej ortofotomapy.
Zakładka — wzdłużna i poprzeczna
Zakładka obrazów jest najważniejszym parametrem udanej rekonstrukcji fotogrametrycznej. Dwa składniki to zakładka wzdłużna (frontlap), czyli nakładanie się kolejnych zdjęć wzdłuż kierunku lotu, oraz zakładka poprzeczna (sidelap), czyli nakładanie się sąsiednich linii lotu.
Wymaganie
Zakładka wzdłużna (frontlap)
Zakładka poprzeczna (sidelap)
Minimum dla ortofotomapy 2D
75%
60%
Zalecane dla dokładnego 3D
80–85%
65–75%
Domyślne DroneDeploy
70%
60%
Zalecane Pix4D
75–85%
60–70%
Zalecane UgCS
75–85%
60–70%
Podwójna siatka dla 3D
80% (oba przeloty)
70% (oba przeloty)
Zakładka 66 procent to minimalny próg udanej rekonstrukcji 3D, ustalony przez badania akademickie nad fotogrametrią pomostów mostowych. Zakładka 77 procent osiąga najwyższe pokrycie w badaniach pomostów mostowych. Zwiększanie zakładki powyżej 85 procent przynosi malejące korzyści w dokładności geometrycznej, jednocześnie znacznie zwiększając czas lotu i obciążenie obliczeniowe. Wiele ścieżek lotu pod różnymi kątami poprawia lokalną dokładność geometryczną bardziej niż samo zwiększanie procentu zakładki.
Wysokość
W przypadku misji mapujących typowa wysokość wynosi 50–120 metrów AGL dla większości prac pomiarowych. Niższa wysokość zapewnia lepsze GSD, ale pokrywa mniejszy obszar na lot, wymagając więcej baterii i dłuższego całkowitego czasu misji. Wysokość inspekcji elewacji zależy od wysokości budynku i wymaga wielu przelotów na różnych poziomach. Zgodnie z FAA Part 107 maksymalna wysokość wynosi 400 stóp (122 metry) AGL w niekontrolowanej przestrzeni powietrznej, z wyjątkiem zezwalającym na loty powyżej 400 stóp, jeśli dron pozostaje w odległości poziomej nie większej niż 400 stóp od konstrukcji. Śledzenie terenu DJI Pilot 2 obsługuje minimum 25 metrów AGL z RTK oraz 30 do 200 metrów w trybie śledzenia terenu w czasie rzeczywistym.
Prędkość lotu
Misje mapowania i fotogrametrii latają zazwyczaj z prędkością 3–8 metrów na sekundę (10–28 km/h). Niższe prędkości pozwalają na szybsze czasy migawki, redukując rozmycie ruchu, a prędkość musi być skoordynowana z interwałem przechwytywania, aby utrzymać docelową zakładkę. Pomiary LiDAR działają z prędkością 3–10 metrów na sekundę w zależności od specyfikacji czujnika. Inspekcja elewacji wykorzystuje 1–3 metry na sekundę dla szczegółowych przelotów pionowych. FAA Part 107 ustawia maksymalną prędkość na 100 mph (44,7 m/s).
Kąt gimbala
Kąt gimbala określa orientację kamery względem drona. Kąt nadiru -90 stopni jest standardem dla mapowania ortofotomap 2D z kamerą skierowaną bezpośrednio w dół. Kąty ukośne od -70 do -45 stopni są używane do rekonstrukcji modelu 3D w celu uchwycenia boków budynków i elementów pionowych. Kąt poziomy 0 stopni jest używany do inspekcji elewacji skierowanej na powierzchnię budynku. Kąt ukośny -45 stopni jest powszechny dla misji orbitalnych i POI, aby uchwycić zarówno szczegóły pionowe, jak i poziome.
Ustawienia kamery
Czas migawki powinien być ustawiony na minimum 1/500 sekundy dla mapowania przy prędkości, zaleca się 1/1000 sekundy lub szybciej, aby zmniejszyć rozmycie ruchu. ISO powinno być ustawione na 100–400 w celu zmniejszenia szumów, z auto-ISO ograniczonym do maksymalnie 800. Przysłona jest zazwyczaj stała lub automatyczna w kamerach dronów (f/2,8 do f/11). Balans bieli musi być ustawiony ręcznie (np. Słoneczny przy 5500K) dla spójnego koloru we wszystkich obrazach w zestawie danych. Interwał przechwytywania jest automatycznie obliczany przez planistę misji na podstawie prędkości, wysokości i docelowej zakładki. Filtry ND powinny być używane w jasnych warunkach, aby utrzymać odpowiedni czas migawki bez prześwietlenia. Typowe interwały przechwytywania wynoszą 1–3 sekundy dla mapowania przy 5–8 m/s.
Śledzenie terenu
Bez śledzenia terenu, dron lecący na stałej wysokości AMSL (nad średnim poziomem morza) nad pagórkowatym terenem będzie miał zmienną odległość AGL, powodując niejednolite GSD (wyższą rozdzielczość na wzniesieniach, niższą w dolinach), luki w pokryciu lub niewystarczającą zakładkę w nisko położonych obszarach oraz potencjalne ryzyko kolizji na wznoszącym się terenie.
Śledzenie terenu DJI Pilot 2 akceptuje pliki GeoTIFF DTM (numeryczny model terenu) lub DSM (numeryczny model pokrycia terenu) dla danych terenowych. Co istotne, DJI Pilot 2 wymaga wysokości względem elipsoidy WGS84, a nie wysokości ortometrycznych (poziom morza). DTM reprezentuje gołą ziemię i jest używany do pomiarów leśnych i gołego gruntu, podczas gdy DSM obejmuje budynki i roślinność do inspekcji infrastruktury. Drony DJI wyświetlają wysokość ASL przy użyciu modelu geoidy EGM96 wewnętrznie, ale plik terenowy musi używać wysokości elipsoidalnych z zastosowanym przesunięciem undulacji geoidy. Połączenie RTK jest wymagane do śledzenia terenu w niektórych wersjach oprogramowania układowego, z minimalną wysokością 25 metrów nad DSM, a śledzenie terenu w czasie rzeczywistym obsługuje od 30 do 200 metrów AGL.
Pozycjonowanie RTK (Real-Time Kinematic) zapewnia centymetrową dokładność podczas lotu, wymagając ciągłego łącza radiowego ze stacją bazową. DJI Matrice 350 RTK osiąga dokładność 1 cm + 1 ppm w poziomie i 1,5 cm + 1 ppm w pionie. RTK jest kluczowe dla precyzyjnego śledzenia terenu w zmiennym ukształtowaniu, bezpośredniego georeferencjonowania, które zmniejsza potrzebę stosowania naziemnych punktów kontrolnych (GCP), oraz powtarzalnych inspekcji, które wracają do dokładnie tych samych punktów nawigacyjnych w wielu lotach.
Świadomość terenu LiDAR wykorzystuje aktywne skanowanie laserowe do mapowania terenu. Planowanie lotów specyficzne dla LiDAR wymaga precyzyjnych równoległych linii i wzorców kalibracyjnych (ósemek) dla wysokiej jakości chmur punktów. LiDAR może penetrować roślinność, aby wygenerować DTM gołego gruntu. UgCS zawiera dedykowane narzędzia do planowania lotów LiDAR, a RTK jest zazwyczaj używane razem z LiDAR do georeferencjonowania.
Proces importu DEM/DSM obejmuje pozyskanie danych wysokościowych (publiczne DEM, takie jak Copernicus 30m lub 90m rozdzielczości lub dane z niestandardowych pomiarów), konwersję do formatu GeoTIFF z odpowiednim układem współrzędnych, zastosowanie przesunięcia pionowego układu odniesienia w celu konwersji wysokości ortometrycznych na elipsoidalne, załadowanie do planisty misji, ustawienie żądanej wartości AGL nad terenem, a następnie obliczenie przez planistę zmiennych wysokości AMSL punktów nawigacyjnych w celu utrzymania stałego AGL.
Inne metody terenowe obejmują UgCS Smart AGL (algorytm wykorzystujący importowany DEM), DroneDeploy Terrain Awareness (przełącznik obok wskaźnika wysokości lotu), Copernicus DEM (rozdzielczość 30m/90m używana przez planistę internetowego DroneGrid) oraz laserowe dalmierze czasu rzeczywistego na dronach DJI wykorzystujące skierowane w dół czujniki IR o ograniczonym zasięgu, typowo poniżej 30 metrów.
Przestrzeń powietrzna i aspekty regulacyjne
FAA Part 107 (Stany Zjednoczone)
FAA Part 107 reguluje komercyjne operacje dronów w przestrzeni powietrznej USA. Wymaga certyfikatu pilota zdalnego (Remote Pilot Certificate) uzyskanego poprzez zdanie testu wiedzy UAG z obowiązkiem szkolenia okresowego co 24 miesiące. Limit wysokości wynosi 400 stóp (122 metry) AGL w niekontrolowanej przestrzeni powietrznej. Maksymalna prędkość to 100 mph (87 węzłów). VLOS musi być utrzymywana przez cały czas, choć obserwator wizualny może pomagać. Loty nocne są dozwolone z oświetleniem przeciwkolizyjnym widocznym z odległości 3+ mil statutowych. Operacje nad ludźmi są dozwolone w kategoriach 1–4 w zależności od wagi drona i ryzyka obrażeń. Nadawanie Remote ID jest wymagane w przypadku większości operacji Part 107, transmitując identyfikator drona, lokalizację i pozycję stacji kontrolnej.
Klasy przestrzeni powietrznej nakładają różne wymagania: Klasa G (niekontrolowana) nie wymaga autoryzacji, podczas gdy Klasy B, C, D i E wymagają autoryzacji LAANC. LAANC (Low Altitude Authorization and Notification Capability) zapewnia niemal natychmiastową zgodę w wielu lokalizacjach. Minimum pogodowe wymagają widzialności 3 mil statutowych, 500 stóp poniżej chmur i 2000 stóp odległości poziomej od chmur. Part 107.49 prawnie wymaga przedlotowej weryfikacji zdolności do lotu przed każdą operacją.
Proponowana zasada Part 108 dotycząca BVLOS, mandatowana przez ustawę FAA Reauthorization Act z 2024 roku, tworzy nowe ramy dla rutynowych operacji poza wizualną linią widzenia (BVLOS), których finalizacja przewidziana jest na sierpień 2025 roku. Będzie to miało znaczący wpływ na przepływy pracy inspekcji infrastruktury, szczególnie w przypadku długich obiektów liniowych, takich jak rurociągi i linie energetyczne.
EASA (Europa)
Europejska Agencja Bezpieczeństwa Lotniczego klasyfikuje operacje dronów w trzech kategoriach. Kategoria otwarta (Open Category) obejmuje operacje niskiego ryzyka z podkategoriami A1, A2 i A3 w zależności od klasy drona (C0–C4), maksymalną wysokością 120 metrów AGL, wymogiem VLOS i brakiem konieczności uzyskania zezwolenia operacyjnego. Od 1 stycznia 2024 roku wszystkie drony kategorii otwartej muszą być oznaczone klasą. Kategoria szczególna (Specific Category) obejmuje operacje o podwyższonym ryzyku, w tym większość inspekcji infrastruktury, wymagając zezwolenia operacyjnego od krajowej władzy lotniczej. Wykorzystuje standardowe scenariusze (STS-01, STS-02) dla predefiniowanych operacji oraz ramy PDRA (Pre-Defined Risk Assessment), w tym operacje BVLOS z odpowiednimi środkami ograniczającymi ryzyko. Kategoria certyfikowana (Certified Category) dotyczy operacji równoważnych standardom lotnictwa załogowego.
Normy ICAO
Międzynarodowa Organizacja Lotnictwa Cywilnego ustanawia podstawowe normy, które poszczególne państwa wdrażają poprzez krajowe przepisy (FAA, EASA, CASA itp.). Kluczowe zasady obejmują „zobacz i unikaj" (see-and-avoid), zasady pierwszeństwa oraz ograniczenia wysokości. Zestaw narzędzi UAS Toolkit ICAO zapewnia wytyczne dla państw członkowskich dotyczące integracji bezzałogowych statków powietrznych w ich systemach przestrzeni powietrznej.
Kluczowe koncepcje regulacyjne
NOTAM (Notice to Airmen) — powiadomienia dla personelu lotniczego muszą być sprawdzane przed każdym lotem pod kątem tymczasowych ograniczeń lotów (TFR) i ograniczeń przestrzeni powietrznej. TFR mogą być wydawane z krótkim wyprzedzeniem dla ruchu VIP, pożarów lasów, wydarzeń na stadionach i innych zagrożeń bezpieczeństwa. Klasy przestrzeni powietrznej wahają się od Klasy A (brak dostępu dla UAS) przez B/C/D/E (kontrolowana, wymagająca autoryzacji) do G (niekontrolowana). BVLOS generalnie wymaga zwolnienia (waiver) w ramach Part 107 lub szczególnego zezwolenia w ramach EASA. VLOS pozostaje standardem dla prawie wszystkich operacji inspekcji infrastruktury do dnia dzisiejszego.
Kontrole przed lotem
FAA 14 CFR Part 107.49 wymaga, aby pilot zdalny dowodzący ocenił środowisko operacyjne (pogoda, przestrzeń powietrzna, osoby i mienie na ziemi) oraz upewnił się, że mały bezzałogowy statek powietrzny (sUAS) jest w stanie bezpiecznej eksploatacji. NTSB przypisała wiele incydentów z UAS nieodpowiednim procedurom przedlotowym.
Faza planowania przy biurku
Przed wyjściem z biura operator powinien zaimportować wysokorozdzielczy DEM/DSM do planisty misji, nałożyć ograniczenia operacyjne, w tym granice własności, strefy zakazu lotu i przeszkody (wieże radiowe, budynki, linie energetyczne), zaplanować misję zoptymalizowaną pod konkretny ładunek (fotogrametria vs LiDAR vs termowizja), uruchomić symulator lotu, aby zweryfikować wysokości, prędkości, akcje kamery i śledzenie terenu, sprawdzić NOTAM i TFR dla obszaru operacji oraz potwierdzić autoryzację LAANC dla kontrolowanej przestrzeni powietrznej.
Kontrole terenowe — płatowiec i napęd
Sprawdź płatowiec pod kątem pęknięć, wgnieceń i luźnych elementów. Sprawdź wszystkie śmigła pod kątem odprysków, pęknięć i odkształceń — wymień natychmiast, jeśli zostanie znalezione jakiekolwiek uszkodzenie. Sprawdź, czy oznaczenia zgodne z kierunkiem obrotu (CW — zgodnie z ruchem wskazówek zegara, CCW — przeciwnie) pasują do pozycji silników. Upewnij się, że śmigła są w pełni zablokowane i prawidłowo osadzone. Sprawdź mocowania silników pod kątem luzów. Obróć silniki ręcznie, aby sprawdzić, czy nie występują tarcie lub opór. Sprawdź podwozie. Upewnij się, że wszystkie śruby i elementy złączne są dokręcone. Sprawdź swobodę ruchu gimbala i upewnij się, że zacisk gimbala został usunięty.
Kontrole terenowe — baterie
Poziom naładowania baterii lotniczej musi wynosić minimum 95 procent dla pełnych misji. Sprawdź baterie pod kątem wybrzuszeń, wgnieceń lub uszkodzeń termicznych. Sprawdź, czy liczba cykli mieści się w limitach producenta (typowa żywotność cyklu LiPo to 200–300 cykli dla inteligentnych baterii DJI). Upewnij się, że bateria jest prawidłowo osadzona i zablokowana. Sprawdź poziom naładowania baterii kontrolera oraz baterii urządzenia mobilnego lub wyświetlacza. Noś minimum jedną zapasową baterię do krytycznych misji. W przypadku lotów w niskich temperaturach ogrzej baterie LiPo powyżej 68°F (20°C) przed lotem. Awaria baterii jest główną przyczyną nieplanowanych lądowań dronów. Przechowuj baterie przy poziomie naładowania 40–60 procent do długoterminowego przechowywania i nigdy nie przechowuj całkowicie rozładowanych.
Kontrole terenowe — kontroler zdalny i łącze danych
Włącz kontroler i sprawdź, czy oprogramowanie układowe jest aktualne. Potwierdź reakcję drążków sterowniczych we wszystkich osiach. Sprawdź, czy transmisja wideo jest aktywna przed startem. Sprawdź siłę sygnału łącza sterującego. Ustaw odpowiednią wysokość RTH dla przeszkód na terenie — zazwyczaj 50–100 metrów AGL w zależności od lokalnych przeszkód, upewniając się, że uwzględnia teren między bieżącą pozycją a miejscem startu. Skonfiguruj zachowanie zabezpieczeń (RTH vs zawis vs lądowanie). Sprawdź, czy karta SD jest zainstalowana w kontrolerze, jeśli dotyczy.
Kontrole terenowe — kamera i ładunek
Wyczyść obiektyw kamery. Sprawdź ustawienia kamery, w tym rozdzielczość, liczbę klatek na sekundę, balans bieli i ekspozycję. Upewnij się, że karta SD jest zainstalowana, sformatowana i ma wystarczającą pojemność. Sprawdź kalibrację i stabilizację gimbala. Sprawdź, czy filtr ND lub polaryzacyjny jest zainstalowany, jeśli potrzeba. W przypadku misji mapujących ustaw parametry zakładki obrazów. W przypadku misji wideo potwierdź format nagrywania i rozdzielczość.
Przestrzeń powietrzna i pogoda — na miejscu bezpośrednio przed lotem
Sprawdź status autoryzacji LAANC. Zweryfikuj NOTAM i TFR dla obszaru operacji za pomocą aplikacji B4UFLY lub równoważnej. Prędkość wiatru: przerwij, jeśli przekracza limity drona, zazwyczaj 24+ mph w sposób ciągły. Widzialność: FAA Part 107 wymaga minimum 3 mil statutowych. Podstawa chmur: zachowaj minimum 500 stóp poniżej chmur zgodnie z Part 107.
Test zawisu po starcie
Przed rozpoczęciem misji unieś drona na 5–10 stóp AGL. Sprawdź znoszenie pozycji, aby zweryfikować jakość utrzymania GPS. Nasłuchuj nieprawidłowych dźwięków silników. Sprawdź dane telemetryczne, w tym liczbę satelitów, HDOP (Horizontal Dilution of Precision) i napięcie baterii. W przypadku wykrycia jakiejkolwiek anomalii, ląduj natychmiast i diagnozuj przed kontynuacją.
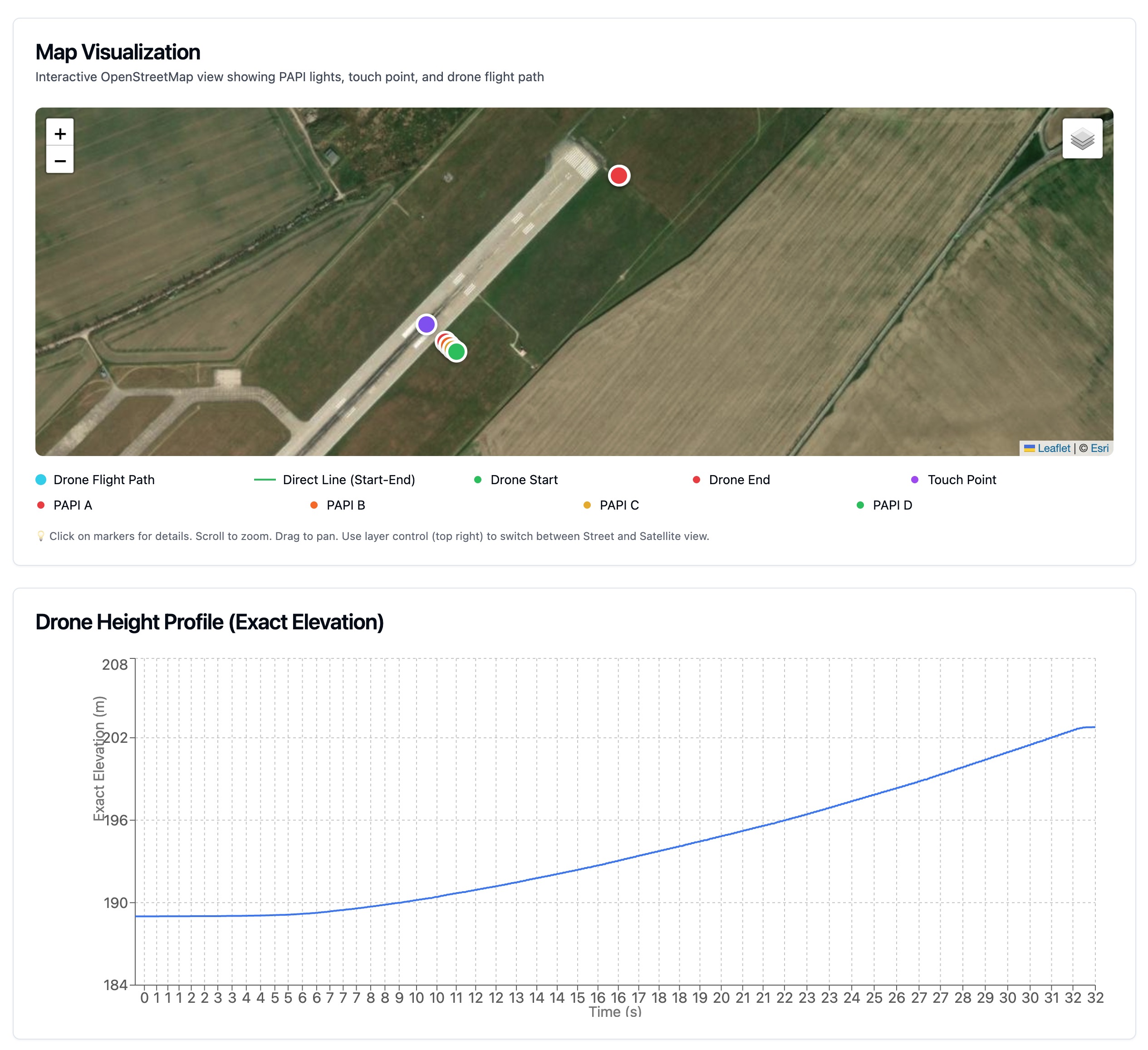
Planowanie lotów dla inspekcji pasa startowego
Inspekcja pasa startowego wymaga szczególnych rozważań ze względu na krytyczne dla bezpieczeństwa znaczenie nawierzchni lotniskowych. Wykrywanie pęknięć, ciał obcych (FOD), osadów gumowych, uszkodzeń oświetlenia i degradacji nawierzchni wymaga niezwykle wysokiej dokładności geometrycznej. Długości pasów startowych wynoszą zazwyczaj od 1500 do 4000 metrów (4900 do 13 000 stóp), a szerokości od 23 do 60 metrów (75 do 200 stóp).
Parametry planowania lotów dla pasów startowych
Typ misji powinien być misją korytarzową lub liniową wykonaną wzdłuż linii środkowej pasa startowego. Wysokość należy ustawić na 30–60 metrów AGL do wykrywania pęknięć lub 60–100 metrów do ogólnych przeglądów stanu. Docelowe GSD to 0,5–1,5 cm/piksel do wykrywania pęknięć i 2–3 cm/piksel do ogólnych przeglądów stanu. Zakładka powinna wynosić 80 procent z przodu i 70–75 procent z boku dla kompleksowego pokrycia. Kąt gimbala powinien wynosić -90 stopni (nadir) do generowania ortofotomapy i -45 stopni (ukośnie) dla elementów pionowych, takich jak światła krawędziowe pasa startowego. Prędkość lotu powinna wynosić 3–5 metrów na sekundę, wolniej dla wyższej rozdzielczości i większej zakładki. Wzór podwójnej siatki (double grid) jest korzystny dla modelowania 3D powierzchni pasa startowego.
Specjalne uwagi dotyczące operacji na pasie startowym
Koordynacja przestrzeni powietrznej z kontrolą ruchu lotniczego jest obowiązkowa. NOTAM musi być wydany dla operacji dronów w pobliżu aktywnych pasów startowych. Operator musi skoordynować z operacjami lotniskowymi zamknięcie pasa startowego lub harmonogram aktywności. BVLOS jest zazwyczaj wymagane do pełnego pokrycia długości pasa startowego, co wymaga zwolnienia (waiver) w ramach Part 107. Zakłócenia elektromagnetyczne (EMI) z radarów lotniskowych i urządzeń nawigacyjnych mogą wpływać na kompas i GPS drona. Zagrożenia ze strony dzikich zwierząt i FOD muszą być sprawdzone przed lotem. Strefa awaryjnego lądowania musi być zidentyfikowana przed startem. Misje inspekcji pasów startowych wymagają najwyższego poziomu planowania przed lotem i koordynacji bezpieczeństwa spośród wszystkich typów inspekcji infrastruktury.
Planowanie lotów dla inspekcji mostów
Inspekcja mostów z użyciem dronów jest jednym z najbardziej wymagających zastosowań inspekcji infrastruktury, wymagającym pokrycia zarówno górnego pomostu, jak i złożonej podkonstrukcji poniżej. Badania akademickie opublikowane przez PMC (PMC10459964 — badanie ścieżki lotu na moście Blessington Bridge) oraz badania FHWA (FHWA-HRT-21-086) ustaliły konkretne parametry skutecznej inspekcji mostów.
Wyniki badań
Wysokość UAV i kąt kamery mają najsilniejszy wpływ na gęstość i jednolitość danych. Minimum 66 procent zakładki jest wymagane do udanej rekonstrukcji 3D, podczas gdy zakładka 77 procent osiąga najwyższe pokrycie w badaniach mostów. Wiele ścieżek lotu poprawia lokalną dokładność geometryczną bardziej niż samo zwiększanie procentu zakładki. Co istotne, żaden pojedynczy zestaw parametrów lotu nie jest optymalny dla każdego celu zbierania danych — parametry muszą być dostosowane do konkretnego typu mostu, jego stanu i wymagań inspekcyjnych.
Pomost mostu — powierzchnia górna
W przypadku pomostu mostu lub powierzchni górnej stosuje się misję typu siatka 2D lub podwójna siatka. Wysokość powinna wynosić 20–50 metrów AGL w zależności od wymaganej rozdzielczości wykrywania pęknięć. Docelowe GSD to 2–5 cm/piksel dla przeglądów stanu i 0,5–2 cm/piksel do mapowania pęknięć. Zakładka powinna wynosić 75–80 procent z przodu i 65–75 procent z boku, z gimbalem ustawionym na -90 stopni (nadir).
Podkonstrukcja mostu — pod pomostem, filary i przyczółki
Podkonstrukcja stanowi największe wyzwanie dla inspekcji dronem. Typ misji to niestandardowe punkty nawigacyjne 3D lub pionowe mapowanie elewacji. Głównym wyzwaniem jest zacienienie sygnału GNSS pod pomostem mostu, które tworzy środowisko bez dostępu do GPS. Rozwiązania obejmują systemy pozycjonowania wizualnego (VIO), misje punktów nawigacyjnych zainicjowane przed lotem pod pomostem oraz ręczny lot w obszarach bez GPS z asystą VIO. Odległość od konstrukcji powinna wynosić 3–10 metrów, z kątem gimbala od 0 do -45 stopni (poziomo do ukośnie w zależności od celu). Zakładka powinna wynosić 80 procent lub więcej dla wiarygodnej rekonstrukcji metodą Structure from Motion (SfM) w złożonej geometrii.
Filary i kolumny mostów
Misje orbitalne lub POI są wykonywane wokół każdego filara z promieniem orbity 5–15 metrów w zależności od szerokości filara. Wykonuje się wiele przelotów orbitalnych na różnych poziomach wysokości z pochyleniem gimbala -45 stopni dla ukośnego pokrycia.
Kluczowe wyzwania
Wielościeżkowość i odbicia GPS występują w pobliżu stalowych konstrukcji mostów. Zacienienie sygnału GNSS pod pomostem stwarza trudności nawigacyjne. Ograniczone przestrzenie między dźwigarami ograniczają manewrowość drona. Ruch pod mostem stwarza zagrożenia bezpieczeństwa. Turbulencje wiatru wokół nadkonstrukcji mostu wpływają na stabilność lotu. Badania DroneBlocks z Purdue University opracowały zautomatyzowane ścieżki lotu specjalnie do inspekcji pod pomostem z wykorzystaniem podejść programowania wizualnego.
Planowanie lotów dla inspekcji budynków
Inspekcja budynków i elewacji z użyciem dronów stała się preferowaną metodą w stosunku do tradycyjnych podejść z rusztowaniami i podnośnikami ze względu na znaczące oszczędności kosztów i poprawę bezpieczeństwa.
Parametry mapowania elewacji
W przypadku mapowania powierzchni pionowych stosuje się pionowy wzór zygzakowaty (tryb elewacji) wzdłuż ściany budynku. Odległość od obiektu powinna wynosić 5–20 metrów w zależności od wysokości budynku i rozdzielczości kamery. Pionowy odstęp między przelotami powinien wynosić 5–15 metrów, aby zapewnić 60–70 procent zakładki pionowej. Pochylenie gimbala jest ustawione na 0 stopni (poziomo, skierowane na powierzchnię budynku). Prędkość lotu jest ograniczona do 1–3 metrów na sekundę dla szczegółowego przechwytywania.
Przeloty orbitalne dla kompleksowego pokrycia
Przeloty orbitalne są wykonywane wokół budynku dla narożników i kompleksowego pokrycia 3D. Promień orbity jest ustawiany od środka budynku, zazwyczaj jeden przelot na 4–8 pięter. Krok wysokości między przelotami orbitalnymi wynosi 10–20 metrów, z pochyleniem gimbala -45 stopni dla ujęć ukośnych rejestrujących zarówno elewację, jak i linię dachu.
Zalecane kamery i ustawienia
Drony Enterprise zalecane do inspekcji budynków to DJI Matrice 350 RTK z kamerą Zenmuse P1 (pełnoklatkowa 45MP) lub H20T oraz Mavic 3 Enterprise z matrycą CMOS 20MP 4/3 i wideo 4K. Ustawienia kamery powinny obejmować ISO 100–400, czas migawki 1/500 do 1/1000 sekundy oraz ręczny balans bieli. Najlepsze rezultaty daje wideogrametria z użyciem 4K przy minimalnie 30 kl./s z nakładającymi się przelotami.
Aspekty regulacyjne i bezpieczeństwa dla inspekcji elewacji
Zgodnie z FAA Part 107 maksymalna wysokość 400 stóp AGL jest wystarczająca dla większości budynków średniej wysokości. W przypadku budynków wyższych niż 400 stóp operator musi pozostać w odległości poziomej nie większej niż 400 stóp od konstrukcji, aby kwalifikować się do odstępstwa powyżej 400 stóp. Operacje w środowisku miejskim wymagają uwzględnienia pieszych poniżej — mogą być potrzebne zamknięcia ulic. Kwestie prywatności mają zastosowanie, gdy widoczne są okna i lokatorzy. Należy ustalić plan awaryjnego lądowania w środowisku miejskim, gdzie bezpieczne strefy lądowania są ograniczone. Inspekcja budynków w środowisku miejskim wymaga najwyższego poziomu świadomości sytuacyjnej pilota i wstępnego planowania.
Wykonywanie misji i monitorowanie
Telemetria na żywo
Dane przesyłane w czasie rzeczywistym podczas lotu obejmują pozycję (współrzędne GPS/RTK, HDOP, liczba satelitów), orientację (przechylenie, pochylenie, odchylenie), prędkość (prędkość względem ziemi, prędkość pionowa), baterię (napięcie, procent pozostałego poziomu, pobór prądu, pozostały czas lotu), łącze radiowe (moc sygnału RC, moc sygnału wideo, jakość łącza danych) oraz odległość (odległość od domu, przebyta odległość).
Najlepsze praktyki monitorowania telemetrii obejmują ciągłą obserwację — większość wypadków daje wczesne ostrzeżenie poprzez anomalie telemetryczne. HDOP powinien być monitorowany z celem poniżej 1,0 dla RTK i poniżej 2,5 dla standardowego GPS. Rezerwa baterii powinna utrzymywać minimum 20–30 procent dla marginesu bezpieczeństwa, z zabezpieczeniem niskiego poziomu baterii ustawionym na RTH przy 25–30 procentach i automatyczne lądowanie przy 10–15 procentach.
Powrót do domu (RTH)
RTH może być wywołany przez polecenie pilota (ręczny RTH), ostrzeżenie o niskim poziomie baterii, utratę sygnału (limit czasu łącza RC), naruszenie geofence, lub aktywację zabezpieczeń. Wysokość RTH musi być ustawiona wyżej niż wszystkie przeszkody w obszarze lotu — zazwyczaj 50–100 metrów AGL w zależności od lokalnych przeszkód — i musi uwzględniać teren między bieżącą pozycją a domem. Opcje zachowania obejmują RTH, zawis lub lądowanie przy utracie sygnału. Opcje lądowania obejmują precyzyjne lądowanie z użyciem znacznika wizualnego lub standardowe lądowanie.
Geofencing
Geofencing tworzy wirtualny obwód ograniczający lot drona. Cylindryczny geofencing (Mission Planner, PX4) jest wyśrodkowany na pozycji startu i zdefiniowany przez maksymalny promień i wysokość. Wielokątny geofencing (UgCS, DroneDeploy) umożliwia rysowanie niestandardowych granic na mapie. Działania przy naruszeniu obejmują ostrzeżenie pilota, zawis w miejscu, automatyczny RTH lub natychmiastowe lądowanie. Geofencing jest kluczowy dla operacji w pobliżu lotnisk, operacji miejskich i zgodności z granicami nieruchomości.
Konfiguracja zabezpieczeń
Warunek
Opcje działania
Utrata sygnału RC
Zawis, RTH, Lądowanie, Rozbrojenie
Niski poziom baterii (Etap 1)
Tylko ostrzeżenie
Niski poziom baterii (Etap 2)
Wywołanie RTH
Krytyczny poziom baterii (Etap 3)
Natychmiastowe lądowanie
Naruszenie geofence
Ostrzeżenie, RTH, Lądowanie
Utrata GPS
Zawis (jeśli niepotrzebny), Lądowanie
Naruszenie limitu wysokości
Utrzymaj wysokość, RTH
Planowanie awaryjne misji
Kryteria przerwania misji muszą być zdefiniowane przed lotem. Minimum jedna zapasowa bateria powinna być dostępna na miejscu. Należy zidentyfikować strefy awaryjnego lądowania. Należy wyznaczyć alternatywne miejsce startu i lądowania, jeśli podstawowe jest zagrożone. Należy ustalić plan komunikacji z załogą i interesariuszami. UgCS zaleca symulację całego lotu przed wyruszeniem w teren.
Przepływ pracy po misji
Po zakończeniu misji inspekcyjnej operator powinien przejrzeć logi telemetrii pod kątem anomalii, zweryfikować jakość obrazów i wideo (sprawdzając ostrość, ekspozycję i pokrycie), wykonać kopię zapasową danych na nadmiarowym nośniku, naładować baterie do następnego lotu, przeprowadzić inspekcję po locie sprawdzającą uszkodzenia, wyczyścić obiektyw kamery i zdjąć śmigła, jeśli są uszkodzone. Uzupełnij dziennik lotów i dokumentację do celów zgodności.
Faza analizy po misji obejmuje przetwarzanie zarejestrowanych obrazów przez oprogramowanie fotogrametryczne w celu wygenerowania ortofotomap, chmur punktów, siatek 3D i raportów inspekcyjnych. Konsekwentne planowanie lotów zapewnia, że dane z okresowych inspekcji są bezpośrednio porównywalne, umożliwiając analizę trendów i planowanie konserwacji predykcyjnej. Ta powtarzalność jest fundamentalną propozycją wartości ustrukturyzowanego planowania lotów dronów — bez niej analiza porównawcza w szeregach czasowych danych jest zawodna.
Podsumowanie kluczowych norm liczbowych
Parametr
Zakres standardowy
Uwagi krytyczne
Zakładka wzdłużna (frontlap)
75–85%
Minimum 66% dla rekonstrukcji 3D
Zakładka poprzeczna (sidelap)
60–75%
77% optymalne dla pokrycia pomostu mostu
GSD do wykrywania pęknięć
0,5–2 cm/piksel
Zależy od wysokości i matrycy
Wysokość mapowania
50–120 m AGL
FAA maks. 400 stóp (122 m)
Prędkość lotu (mapowanie)
3–8 m/s
Koordynuj z interwałem przechwytywania
Prędkość lotu (elewacja)
1–3 m/s
Wolno dla szczegółowych przelotów pionowych
Czas migawki
minimum 1/500 s
1/1000s+ dla redukcji rozmycia ruchu
ISO
100–400
Maks. 800 z auto-ISO
Wysokość RTH
50–100 m AGL
Musi przewyższać wszystkie przeszkody
Próg lądowania baterii
20–30%
Minimalny margines bezpieczeństwa
Wysokość śledzenia terenu (DJI)
30–200 m AGL
RTK wymagane dla minimum 25 m
Planowanie lotów dronów do inspekcji infrastruktury to interdyscyplinarna dziedzina łącząca inżynierię lotniczą, fotogrametrię, fizykę czujników, zgodność z przepisami i bezpieczeństwo operacyjne. Jakość danych inspekcyjnych — a ostatecznie wartość inspekcji — jest determinowana prawie wyłącznie przez jakość planowania lotu, które ją poprzedza. W miarę jak rynek oprogramowania do planowania lotów dronów stale rośnie, a ramy regulacyjne ewoluują, umożliwiając bardziej złożone operacje BVLOS, możliwości i zastosowania inspekcji infrastruktury opartej na dronach będą się nadal rozwijać, czyniąc ustrukturyzowane planowanie lotów coraz bardziej kluczową umiejętnością dla profesjonalistów inspekcyjnych we wszystkich sektorach infrastruktury.
Najczęściej Zadawane Pytania
Planowanie lotów dronów do inspekcji infrastruktury to proces projektowania zautomatyzowanych tras lotu (misji punktów nawigacyjnych) z zoptymalizowanymi parametrami — wysokością, prędkością, zakładką, kątem gimbala i ustawieniami kamery — w celu rejestrowania spójnych, powtarzalnych i wysokiej jakości obrazów inspekcyjnych. Zapewnia jednolitą wielkość próbkowania terenu (GSD), wystarczającą zakładkę obrazów do rekonstrukcji fotogrametrycznej, zgodność z przepisami oraz bezpieczeństwo podczas misji nad mostami, pasami startowymi, budynkami, rurociągami i innymi obiektami infrastrukturalnymi.
Sześć podstawowych typów misji to: (1) Misje siatki 2D do mapowania ortofotomap płaskich obszarów; (2) Misje korytarzowe/liniowe dla rurociągów, linii energetycznych i pasów startowych; (3) Misje orbitalne/POI dla wież, turbin wiatrowych i filarów mostów; (4) Misje mapowania elewacji do inspekcji zewnętrznych części budynków; (5) Misje 3D z punktami nawigacyjnymi dla złożonych konstrukcji wymagających pełnej kontroli nad każdą pozycją kamery; oraz (6) Misje panoramiczne do dokumentacji przeglądowej 360 stopni.
Zakładka wzdłużna (frontlap) 75–85% i zakładka poprzeczna (sidelap) 60–75% są standardem. Minimalny próg udanej rekonstrukcji 3D to 66% zakładki. Dla szczegółowych inspekcji pomostów mostowych zakładka 77% zapewnia najwyższe pokrycie. Zwiększanie zakładki powyżej 85% przynosi malejące korzyści w dokładności, jednocześnie znacznie zwiększając czas lotu i obciążenie obliczeniowe.
Zgodnie z FAA Part 107 limit wysokości wynosi 400 stóp (122 m) AGL w niekontrolowanej przestrzeni powietrznej, maksymalna prędkość to 100 mph, należy zachować VLOS, a wymagana widzialność to 3 mile statutowe. Kategoria otwarta EASA ogranicza operacje do 120 m AGL bez konieczności uzyskania zezwolenia operacyjnego dla lotów niskiego ryzyka. Inspekcje infrastruktury zwykle podlegają kategoriom szczególnym lub certyfikowanym, wymagającym zezwolenia operacyjnego. LAANC zapewnia niemal natychmiastową autoryzację w kontrolowanych strefach.
Śledzenie terenu dostosowuje wysokość drona nad poziomem gruntu (AGL), aby utrzymać stałą odległość od powierzchni terenu, zapewniając jednolite GSD i zakładkę na zmiennym ukształtowaniu. Bez niego dron lecący na stałej wysokości AMSL nad pagórkowatym terenem uzyskuje wyższą rozdzielczość na wzniesieniach i niższą w dolinach, z potencjalnymi lukami w pokryciu. DJI Pilot 2 obsługuje śledzenie terenu w czasie rzeczywistym od 30 do 200 m AGL przy użyciu importowanych plików DTM/DSM GeoTIFF z pozycjonowaniem RTK.
Optymalizuj swoje inspekcje infrastruktury
Wykorzystaj profesjonalne planowanie lotów dronów do precyzyjnych, powtarzalnych i zgodnych z przepisami inspekcji infrastruktury. Skontaktuj się z nami, aby dowiedzieć się, jak nasze rozwiązania mogą usprawnić Twoje procesy inspekcyjne.
Automatyczna inspekcja infrastruktury z wykorzystaniem dronów
Automatyczna inspekcja dronowa wykorzystuje zaprogramowane trasy lotu, wizję komputerową i analizę AI do przeglądu obiektów infrastrukturalnych, w tym pasów sta...