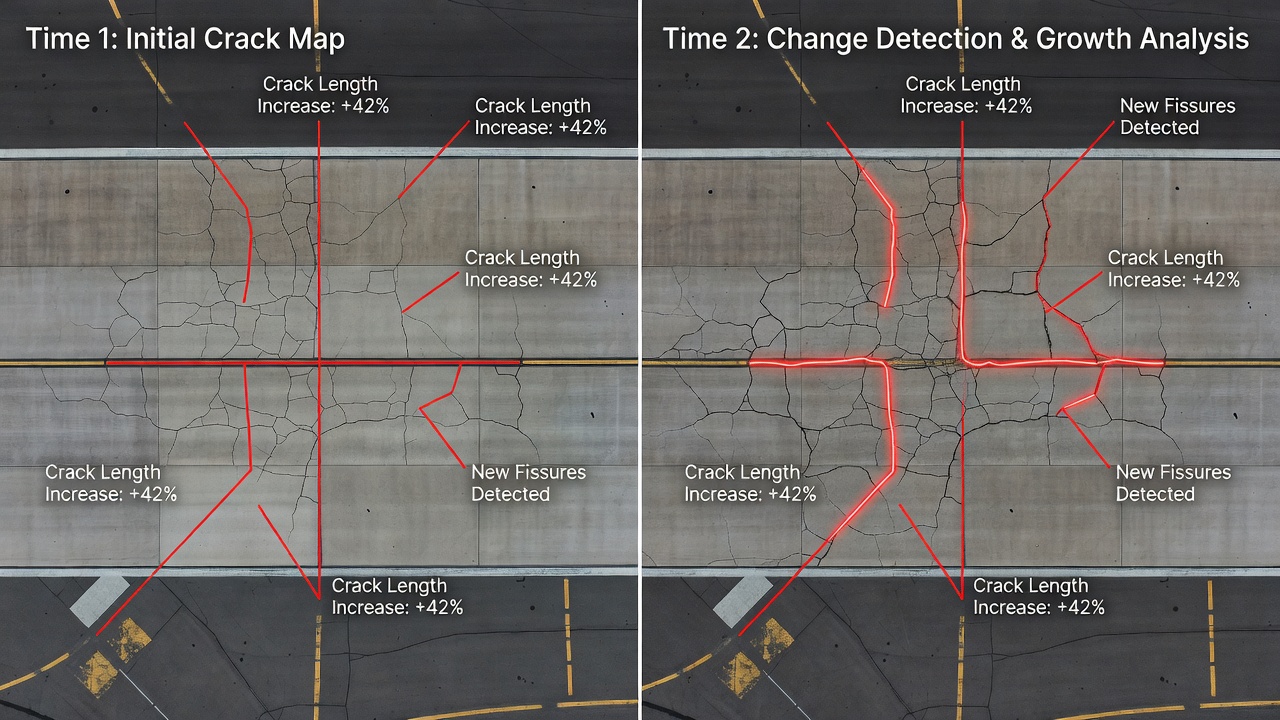
Detekcia zmien porovnáva koregistrované snímky alebo mračná bodov tej istej konštrukcie nasnímané v rôznych časoch s cieľom identifikovať nové, zhoršujúce sa alebo opravené chyby — trhliny, ktoré narástli, vydrolenia, ktoré sa zväčšili, koróziu, ktorá sa rozšírila. Umožňuje kvantitatívne sledovanie zhoršovania stavu v čase pre monitorovanie infraštruktúry.
Detekcia zmien pre monitorovanie infraštruktúry
Definícia a účel
Detekcia zmien je proces identifikácie rozdielov v stave konštrukcie, povrchu alebo prostredia porovnaním pozorovaní získaných v rôznych časových bodoch. V kontexte monitorovania civilnej infraštruktúry detekcia zmien systematicky porovnáva koregistrované snímky, ortomozaily alebo 3D mračná bodov toho istého majetku — dráhy, mostovej dosky, vozovky alebo budovy — nasnímané počas opakovaných meraní, s cieľom identifikovať nové defekty, kvantifikovať progresiu existujúceho zhoršovania a overiť účinnosť zásahov údržby. Na rozdiel od jednorazovej inšpekcie, ktorá zachytáva iba okamžitý stav, detekcia zmien odhaľuje časový rozmer zhoršovania: ktoré trhliny aktívne rastú, ktoré vydrolené oblasti sa zväčšujú, kde sa šíri korózia a aké deformácie sa kumulujú.
Základným účelom detekcie zmien je transformovať údaje o stave infraštruktúry zo statických snímok do dynamických časových záznamov. Jedna inšpekcia odpovedá na otázku „aký je aktuálny stav?" Detekcia zmien odpovedá na prevádzkovo relevantnejšiu otázku „ako sa stav mení?" Toto rozlíšenie je kritické pre správu infraštruktúrneho majetku, pretože zhoršovanie je dynamický proces. Trhlina, ktorá zostala stabilná pri šírke 0,3 mm počas troch rokov, predstavuje inú prioritu údržby ako trhlina, ktorá narástla z 0,3 mm na 1,5 mm v rovnakom období, aj keď obe trhliny vyzerajú pri jednej inšpekcii identicky. Detekcia zmien kvantifikuje túto rýchlosť zhoršovania, čo umožňuje plánovanie údržby na základe stavu, prognózovanie rozpočtu a hodnotenie rizík, ktoré sú založené na základe statických inšpekcií nemožné.
Pri správe letiskových vozoviek podľa ICAO Annex 14 — Aerodromes, Volume I je prevádzkovateľ letiska povinný udržiavať vozovky v stave, ktorý zabraňuje poškodeniu lietadiel a je bez voľného materiálu. Zatiaľ čo pravidelné vizuálne inšpekcie spĺňajú základné požiadavky, ICAO Doc 9157 (Aerodrome Design Manual, Part 3: Pavements) a norma ASTM D5340 pre index stavu letiskových vozoviek (PCI) zdôrazňujú dôležitosť sledovania trendov zhoršovania v čase. Detekcia zmien poskytuje kvantitatívny základ pre analýzu trendov, čo umožňuje prevádzkovateľom letísk identifikovať vozovky so zrýchľujúcou sa mierou zhoršovania skôr, než dosiahnu kritické stavy. Metodika priamo podporuje ciele ICAO Global Air Navigation Plan (GANP) v oblasti odolnosti infraštruktúry a optimalizácie údržby na základe rizika.
Koncept detekcie zmien pochádza z diaľkového prieskumu a geopriestorovej analýzy, kde bol vyvinutý na monitorovanie zmien vo využívaní pôdy, sledovanie odlesňovania a analýzu urbánneho rozvoja pomocou satelitných snímok. Tieto základné metódy — diferenčné snímkovanie, analýza hlavných komponentov a porovnávanie po klasifikácii — boli adaptované a rozšírené pre infraštruktúrne aplikácie, kde je miera zmien oveľa menšia (milimetre až centimetre, nie metre až kilometre) a požiadavky na presnosť sú zodpovedajúco vyššie. Moderná detekcia zmien infraštruktúry pracuje so sub-milimetrovou citlivosťou pre meranie trhlín a sub-centimetrovou citlivosťou pre monitorovanie deformácií.
Registrácia snímok — predpoklad detekcie zmien
Prečo presnosť registrácie určuje kvalitu detekcie zmien
Spoľahlivá detekcia zmien zásadne závisí od presnosti registrácie snímok — procesu geometrického zarovnania dvoch alebo viacerých snímok tej istej scény tak, aby zodpovedajúce pixely reprezentovali rovnaké fyzické miesto na konštrukcii. Bez presnej registrácie bude každé porovnanie snímok obsahovať falošné signály zmien na hranách objektov, textúrových rozhraniach a povrchových prvkoch, ktoré sú jednoducho nesprávne zarovnané, nie fyzicky zmenené. Chyby registrácie už na úrovni jedného pixelu môžu vytvárať falošné artefakty zmien, ktoré prekryjú skutočné signály defektov, najmä pri malých defektoch, ako sú trhliny, ktoré môžu byť v typických infraštruktúrnych snímkach široké iba 2–5 pixelov.
Vzťah medzi presnosťou registrácie a minimálnou detekovateľnou zmenou je riadený pomerom signálu k šumu detekčného systému. Pri metódach detekcie zmien založených na pixeloch sa chyby registrácie prejavujú ako aditívny šum v diferenčnom obraze. Výskum konzistentne dokazuje, že sub-pixelová presnosť registrácie — typicky lepšia ako 0,5 pixelu strednej kvadratickej chyby (RMSE) — je potrebná pre spoľahlivú detekciu malých zmien defektov. Pri vzdialenosti vzorkovania na zemi (GSD) 1 mm na pixel (typická pre presné merania dráh) to zodpovedá geometrickej tolerancii zarovnania 0,5 mm. Dosiahnutie tejto tolerancie pri opakovaných meraniach vykonávaných s odstupom mesiacov alebo rokov vyžaduje konzistentné metodiky merania, stabilné geodetické siete a robustné registračné algoritmy.
Registrácia snímok založená na prvkoch
Registrácia založená na prvkoch identifikuje výrazné, opakovateľné prvky v referenčnej aj cieľovej snímke, vytvára korešpondencie medzi týmito prvkami a počíta geometrickú transformáciu, ktorá mapuje cieľovú snímku do súradnicového systému referenčnej snímky. Tento prístup je najpoužívanejšou metódou pre detekciu zmien infraštruktúry, pretože je robustný voči zmenám osvetlenia, miernym rozdielom v uhle pohľadu a sezónnym zmenám vzhľadu povrchu, ktoré nepredstavujú štrukturálne zhoršovanie.
Registračný pipeline začína detekciou prvkov pomocou algoritmov navrhnutých pre opakovateľnosť pri rôznych obrazových podmienkach. Scale-Invariant Feature Transform (SIFT) zostáva najpoužívanejším detektorom pre registráciu infraštruktúry, identifikuje kľúčové body na miestach s vysokým priestorovým gradientom, ktoré sú robustné voči zmenám mierky a rotácii. Speeded-Up Robust Features (SURF) poskytuje rýchlejší výpočet s porovnateľným výkonom pre mnohé aplikácie. Pre povrchy vozoviek, kde je textúra relatívne uniformná, ponúkajú prvky ORB (oriented FAST and rotated BRIEF) a AKAZE alternatívy s rôznymi kompromismi medzi výpočtovou efektivitou a robustnosťou párovania. Typický 20-megapixelový ortomozail 500-metrového úseku dráhy poskytuje 10 000 – 50 000 detekovateľných prvkov v závislosti od textúry vozovky, rozstupu škár a povrchových značení.
Párovanie prvkov vytvára korešpondencie medzi detegovanými prvkami v referenčnej a cieľovej snímke pomocou podobnosti deskriptorových vektorov, typicky meranej ako Euklidovská alebo Hammingova vzdialenosť medzi deskriptorovými vektormi. Počiatočná množina zhôd nevyhnutne obsahuje odľahlé hodnoty — nesprávne korešpondencie vyplývajúce z opakujúcich sa vzorov, podobných textúrových plôch alebo nejednoznačnosti prvkov. Odmietanie odľahlých hodnôt používa RANSAC (Random Sample Consensus) alebo jeho varianty (MLESAC, MSAC) na iteratívny odhad transformačného modelu pri klasifikácii zhôd ako vnútorných alebo odľahlých na základe ich konzistencie s odhadovaným modelom. Prahová hodnota RANSAC 2–3 pixely pri rozlíšení ortomozailu je typická pre detekciu zmien infraštruktúry, pričom zamieta zhody, ktorých reziduálna chyba presahuje túto hodnotu.
Geometrický transformačný model sa vyberá na základe očakávanej deformácie medzi meraniami. Pre opakované dronové merania vykonávané s konzistentnými letovými parametrami a RTK polohovaním je zvyčajne postačujúca podobnostná transformácia (posun, rotácia, rovnomerná mierka) alebo afinná transformácia (šesť parametrov: dva posuny, dve mierky, dve skosenia). Pre merania s významnými perspektívnymi rozdielmi alebo terénnymi variáciami môže byť potrebná projektívna transformácia (osem parametrov, tiež nazývaná homografia) alebo polynomická transformácia (vyššieho rádu, typicky 2. alebo 3. rádu pre veľkoplošné merania). Transformácia sa počíta z vnútorných korešpondencií pomocou metódy najmenších štvorcov, pričom reziduálna RMSE slúži ako primárny ukazovateľ kvality. RMSE registrácie pod 0,5 pixelu je cieľom pre vysokokvalitnú detekciu zmien; RMSE nad 1 pixel indikuje potrebu zlepšených riadiacich bodov alebo výberu transformačného modelu.
Registrácia snímok založená na intenzite
Registrácia založená na intenzite pracuje priamo s hodnotami intenzity pixelov namiesto diskrétnych prvkov, pričom optimalizuje transformačné parametre na maximalizáciu metriky podobnosti vypočítanej cez prekrývajúcu sa oblasť snímky. Tento prístup je výhodný, keď obsah snímky nemá dostatok výrazných prvkov na spoľahlivé párovanie prvkov — napríklad čerstvo položené betónové povrchy, rovnomerne textúrovaný asfalt alebo povrchy pokryté vodou či sutinami. Metódy založené na intenzite sa tiež používajú na doladenie po počiatočnej registrácii založenej na prvkoch, čím sa dosahuje sub-pixelová presnosť potrebná pre vysoko citlivú detekciu zmien.
Optimalizačný proces iteratívne transformuje cieľovú snímku, počíta metriku podobnosti oproti referenčnej snímke a upravuje transformačné parametre na zlepšenie metriky. Bežné metriky podobnosti zahŕňajú:
Normalizovaná krížová korelácia (NCC) počíta korelačný koeficient medzi zodpovedajúcimi intenzitami pixelov po normalizácii každého obrazového okna na nulový priemer a jednotkovú smerodajnú odchýlku. Hodnoty NCC sa pohybujú od -1 do +1, pričom hodnoty blízke 1 indikujú silné zarovnanie. NCC je robustné voči lineárnym rozdielom intenzity medzi snímkami, vďaka čomu je vhodné pre merania s rôznymi nastaveniami expozície alebo menšími zmenami osvetlenia.
Vzájomná informácia (MI) meria štatistickú závislosť medzi rozdeleniami intenzít dvoch snímok na základe informačnej entropie. MI je obzvlášť robustná voči nelineárnym rozdielom intenzity medzi snímkami, ako sú tie spôsobené rôznymi typmi senzorov, sezónnymi zmenami vegetácie alebo podmienkami suchého versus mokrého povrchu. MI medzi dvoma dokonale zarovnanými snímkami tej istej scény je maximalizovaná, keď má spoločné rozdelenie intenzít minimálnu entropiu — t. j. vzťah medzi intenzitami je čo najpredvídateľnejší.
Súčet štvorcových rozdielov (SSD) a súčet absolútnych rozdielov (SAD) sú najjednoduchšie metriky, ktoré priamo počítajú pixelový rozdiel intenzity. Predpokladajú, že zodpovedajúce pixely v dvoch snímkach by mali mať po geometrickom zarovnaní identické intenzity, čo je predpoklad, ktorý je v praxi málokedy platný kvôli variáciám osvetlenia, expozície a odozvy senzora. SSD a SAD sa zvyčajne používajú iba pre viacpohľadové stereo párovanie v rámci jednej etapy merania, nie pre medzičasovú detekciu zmien.
Optimalizačné algoritmy pre registráciu založenú na intenzite zahŕňajú gradientný zostup, Powellovu metódu a Levenbergov-Marquardtov algoritmus. Viacúrovňové (hrubé až jemné) stratégie sú štandardné, začínajúc s podvzorkovanými snímkami na odhad približného zarovnania a postupne sa spresňujú pri vyšších rozlíšeniach. Pre detekciu zmien infraštruktúry dosahuje registrácia založená na intenzite typicky presnosť 0,1–0,3 pixelu po doladení v porovnaní s presnosťou 0,3–0,8 pixelu pri metódach založených iba na prvkoch.
Georeferencovaná registrácia pomocou GCP a GNSS
Georeferencovaná registrácia používa zamerané geodetické kontrolné body (GCP) a presné polohy kamier z RTK (Real-Time Kinematic) alebo PPK (Post-Processed Kinematic) GNSS na priame stanovenie geometrického vzťahu medzi snímkami a súradnicami reálneho sveta. Každá snímka je geotagovaná svojou polohou kamery (X, Y, Z) a orientáciou (omega, phi, kappa) z palubného GNSS/IMU a táto informácia je spresnená počas fotogrametrického spracovania pomocou GCP zameraných s centimetrovou presnosťou.
Pre detekciu zmien je kľúčovou výhodou georeferencovanej registrácie to, že opakované merania sú inherentne zarovnané do rovnakého súradnicového systému, čo výrazne zjednodušuje problém registrácie. Namiesto výpočtu párových transformácií medzi etapami merania je každé meranie spracované nezávisle na vytvorenie ortomozailov a mračien bodov v spoločnom súradnicovom referenčnom systéme (typicky WGS84 s lokálnou Transverzálnou Mercatorovou projekciou). Zvyškové nesprávne zarovnanie medzi meraniami sa potom koriguje pomocou reziduálnej transformácie odhadnutej zo stabilných prvkov viditeľných v oboch dátových sadách — značenie vozovky, letiskové svetlá, tesnenia škár alebo špeciálne geodetické terče.
Norma ISO 19157 pre kvalitu geografických informácií špecifikuje požiadavky na polohovú presnosť geopriestorových údajov, ktoré sa priamo vzťahujú na georeferencovanú detekciu zmien. Pre monitorovanie infraštruktúry sú typické ciele presnosti horizontálna RMSE lepšia ako 3 cm a vertikálna RMSE lepšia ako 5 cm pre merania vozoviek. Keď sa tieto presnosti dosiahnu pomocou fotogrametrie založenej na GCP alebo RTK dronového polohovania, reziduálna chyba registrácie medzi opakovanými meraniami je typicky 1–3 pixely pri GSD 1 mm, ktorá sa potom ďalej znižuje pomocou jemnej registrácie na sub-pixelovú úroveň.
ICAO Annex 15 — Aeronautical Information Services stanovuje požiadavky na kvalitu leteckých údajov, ktoré ovplyvňujú návrh meraní pre detekciu zmien. Dátové údaje použité na správu letiskových vozoviek musia spĺňať definované úrovne presnosti, rozlíšenia a integrity zodpovedajúce kritickosti údajov. Pre aplikácie detekcie zmien, kde údaje z meraní informujú rozhodnutia o údržbe ovplyvňujúce bezpečnosť dráhy, sú požiadavky na kvalitu údajov zodpovedajúco prísne, vyžadujúce zdokumentované overenie presnosti pomocou nezávislých kontrolných bodov a komplexné metadátové vykazovanie.
Metódy detekcie zmien
Diferencovanie snímok
Diferencovanie snímok je najpriamejšia a výpočtovo najefektívnejšia metóda detekcie zmien. Po registrácii sa počíta pixelový rozdiel medzi referenčnou snímkou a cieľovou snímkou: Difference(x, y) = I_target(x, y) - I_reference(x, y). Pre stupne šedi s 8-bitovými hodnotami intenzity (0–255) sa diferenčný obraz pohybuje od -255 do +255, typicky sa pre vizualizáciu preškáluje na 0–255. Oblasti bez zmeny produkujú hodnoty rozdielu blízke nule (v závislosti od šumu senzora a menších zmien osvetlenia), zatiaľ čo oblasti s fyzickou zmenou produkujú významné pozitívne alebo negatívne odchýlky.
Kritickým parametrom pri diferencovaní snímok je prah zmeny — veľkosť rozdielu, nad ktorou je pixel klasifikovaný ako zmenený. Výber vhodného prahu vyžaduje vyváženie miery detekcie (správna identifikácia skutočných zmien) a miery falošných poplachov (nesprávna klasifikácia nezmenených pixelov ako zmenených). Optimálny prah závisí od pomeru signálu k šumu zobrazovacieho systému, presnosti registrácie a veľkosti cieľových zmien. Bežné prístupy k výberu prahu zahŕňajú:
Prahovanie smerodajnou odchýlkou nastavuje prah na k × σ, kde σ je smerodajná odchýlka diferenčného obrazu v oblastiach známych ako nezmenené a k je násobiteľ typicky medzi 2 a 5. Prah 3σ zodpovedá približne 99,7% spoľahlivosti, že rozdiel pixelov presahujúci túto hodnotu predstavuje skutočnú zmenu, za predpokladu normálne rozloženého šumu.
Otsuova metóda počíta prah, ktorý minimalizuje vnútrotriedny rozptyl medzi pixelmi zmeny a bez zmeny, automaticky sa prispôsobujúc štatistickým vlastnostiam každého diferenčného obrazu. Je účinná, keď oblasť zmeny tvorí mierny zlomok celkového obrazu (5–30 %).
Bayesovské prahovanie modeluje diferenčný obraz ako zmes dvoch rozdelení — pixely bez zmeny nasledujúce úzke Gaussovo rozdelenie centrované na nule a pixely so zmenou nasledujúce širšie rozdelenie s možným nenulovým priemerom. EM (Expectation-Maximization) algoritmus odhaduje parametre oboch rozdelení a optimálny prah sa počíta z priesečníka týchto dvoch rozdelení.
Diferencovanie snímok je najefektívnejšie na detekciu zmien vzhľadu povrchu: nové trhliny (tmavé lineárne prvky na svetlej vozovke), škvrny z netesností alebo chemických únikov, rast vegetácie a povrchové zafarbenie z iniciácie korózie. Je menej účinné na kvantifikáciu geometrických zmien, ktoré neprodukujú silné rozdiely intenzity — napríklad rozširovanie trhlín, kde trhlina už bola viditeľná v referenčnej snímke a nárast šírky produkuje iba jemné posuny hrán.
Analýza hlavných komponentov (PCA)
Analýza hlavných komponentov (PCA) aplikovaná na detekciu zmien transformuje viacčasové obrazové dáta do nového súradnicového systému, kde sú informácie o zmenách koncentrované v špecifických komponentoch. Pre pár snímok (referenčná a cieľová) sa PCA počíta na kombinovanej dátovej matici, čím vznikajú dva hlavné komponenty. Prvý hlavný komponent zachytáva spoločnú informáciu — pixely, ktoré sú medzi dvoma snímkami podobné. Druhý hlavný komponent zachytáva reziduálny rozdiel — informáciu o zmene.
Výhodou PCA oproti jednoduchému diferencovaniu je, že automaticky dekoreluje dáta, čím oddeľuje signály zmien od systematických rozdielov v celkovom jase, kontraste a odozve senzora. Vďaka tomu je PCA robustnejšia voči zmenám osvetlenia medzi meraniami. PCA obraz zmien (typicky druhý hlavný komponent) často odhaľuje jemné zmeny, ktoré by boli pri priamom diferencovaní skryté v šume.
Pre viacčasovú analýzu s tromi alebo viacerými etapami merania rozširuje koncept PCA Multivariate Alteration Detection (MAD). MAD hľadá lineárne transformácie viacčasových dát, ktoré maximalizujú koreláciu medzi transformovanými pásmami, a potom identifikuje zmeny ako odchýlky od tejto korelačnej štruktúry. Komponenty MAD sú zoradené podľa klesajúceho obsahu informácie o zmene, čo umožňuje analytikovi zamerať sa na najvýznamnejšie signály zmien. Iteratively Reweighted MAD (IR-MAD) zlepšuje robustnosť iteratívnym znižovaním váhy pixelov identifikovaných ako zmenené v predchádzajúcich iteráciách, čím spresňuje model pozadia bez zmeny.
Detekcia zmien pomocou strojového učenia
Metódy strojového učenia pre detekciu zmien sa významne posunuli vpred s dostupnosťou veľkých tréningových datasetov a architektúr hlbokého učenia. Tieto metódy sa učia mapovanie z párov snímok na mapy zmien priamo z označených príkladov, namiesto spoliehania sa na ručne nastavené prahy alebo štatistické modely. Pre monitorovanie infraštruktúry sú relevantné tri hlavné kategórie detekcie zmien založenej na ML:
Klasifikácia založená na pixeloch spracúva každý pixel nezávisle a klasifikuje ho ako zmenu alebo bez zmeny na základe prvkov extrahovaných zo zodpovedajúcich pixelov v oboch snímkach plus kontextu okolia. Prvky môžu zahŕňať spektrálne rozdiely, textúrové miery (GLCM, Gaborove filtre), lokálne priestorové štatistiky a viacúrovňové reprezentácie. Bežnými klasifikátormi sú Random Forest, Support Vector Machines (SVM) a Gradient Boosting. Tréning vyžaduje označené mapy zmien pre reprezentatívnu množinu infraštruktúrnych povrchov a typov defektov.
Hlboké učenie založené na výrezoch používa konvolučné neurónové siete (CNN) pracujúce na výrezoch obrazu centrovaných na každom pixeli. Siestrová sieťová architektúra spracúva referenčný výrez a cieľový výrez cez dve identické CNN vetvy so zdieľanými váhami, potom porovnávací modul (konkatenácia, diferencovanie alebo korelácia) spája reprezentácie prvkov a klasifikačná hlavica produkuje pravdepodobnosť zmeny pre centrálny pixel. Architektúry založené na UNet s preskakovacími spojeniami sú obzvlášť účinné pre detekciu zmien, pretože zachovávajú priestorové rozlíšenie pri integrácii viacúrovňového kontextu. Tréningové datasety pre detekciu zmien infraštruktúry musia zahŕňať reprezentatívne príklady každého typu defektu (trhliny, vydrolenia, korózia, škvrny) pri rôznych svetelných a povrchových podmienkach.
Detekcia zmien založená na objektoch (OBIA) najprv segmentuje obraz na zmysluplné objekty — jednotlivé panelové dosky, segmenty trhlín, vydrolené oblasti — a potom porovnáva objekty v čase namiesto pixelov. Tento prístup je obzvlášť vhodný pre monitorovanie infraštruktúry, pretože defekty sú prirodzene objektom podobné: vydrolenie je súvislá oblasť, trhlina je lineárny prvok, korózne škvrny sú priestorovo koherentné. Objektová detekcia zmien počíta zmeny vlastností objektov (plocha, obvod, tvar, priemerná intenzita) a klasifikuje objekty ako stabilné, rastúce, zmenšujúce sa alebo nové. Objektový prístup inherentne znižuje šum z izolovaných pixelových artefaktov a poskytuje informácie o zmenách v pojmoch priamo relevantných pre hodnotenie stavu infraštruktúry — plocha nového vydrolenia, dĺžka predĺženia trhliny, percentuálny nárast pokrytia koróziou.
Metóda
Typická presnosť
Silné stránky
Obmedzenia
Diferencovanie snímok
60–75 % pixelová presnosť
Jednoduché, rýchle, interpretovateľné
Citlivé na osvetlenie, vyžaduje optimálny prah
PCA / MAD
70–85 % pixelová presnosť
Robustné voči zmenám jasu
Vyžaduje multi-spektrálne alebo viacčasové dáta
Random Forest / SVM
75–88 % pixelová presnosť
Zvláda nelineárne vzťahy
Vyžaduje označené tréningové dáta, obmedzená generalizácia
CNN (siestrový UNet)
85–95 % pixelová presnosť
Vysoká presnosť, učí sa priestorový kontext
Vyžaduje veľké tréningové dáta, výpočtovo náročné
OBIA
80–92 % objektová presnosť
Metriky zmien zodpovedajú sémantike defektov
Závislé od kvality segmentácie, zložitý workflow
Detekcia zmien trhlín
Kvantifikácia rastu trhlín
Detekcia zmien trhlín je najbežnejšou a prevádzkovo najdôležitejšou aplikáciou časovej analýzy pre monitorovanie infraštruktúry. Rast trhlín — nárast šírky, dĺžky alebo hustoty trhlín v čase — je primárnym indikátorom aktívneho zhoršovania betónových a asfaltových konštrukcií. Detekcia zmien trhlín musí pracovať so sub-milimetrovou citlivosťou, pretože merané rozdiely sú často menšie ako samotná trhlina: trhlina, ktorá mala v základnom meraní šírku 0,5 mm a v následnom meraní 1,2 mm, predstavuje zmenu 0,7 mm, ktorá musí byť spoľahlivo detegovaná proti šumu obrazu a neistote registrácie.
Pixelová detekcia zmien trhlín používa diferenčné mapovanie trhlín, kde sa porovnávajú mapy pravdepodobnosti trhlín z každej etapy merania. Mapa pravdepodobnosti trhlín — vytvorená modelom hlbokého učenia na segmentáciu trhlín alebo konvenčným algoritmom detekcie trhlín — priraďuje každému pixelu hodnotu medzi 0 (bez trhliny) a 1 (určite trhlina). Mapa zmien je pixelový rozdiel pravdepodobnosti trhlín medzi etapami, pričom pozitívne hodnoty indikujú nové alebo rozšírené trhliny a negatívne hodnoty indikujú zahojené alebo zalepené trhliny. Morfologické filtrovanie odstraňuje izolované zmenené pixely a analýza spojených komponentov zoskupuje zmenené pixely do diskrétnych objektov zmien.
Kvantitatívne meranie zmeny šírky trhlín vyžaduje sub-pixelovú lokalizáciu hrán. Pre každý segment trhliny v sieti trhlín sú okraje trhliny extrahované s sub-pixelovým rozlíšením pomocou metód, ako je detekcia stupňovitých hrán (fitovanie odozvy hrany na skokovú funkciu a nájdenie sub-pixelovej nulovej úrovne), detekcia hrán založená na momentoch (výpočet polohy hrany z obrazových momentov) alebo modely aktívnych kontúr (snakes), ktoré sa vyvíjajú tak, aby zodpovedali hraniciam trhliny. Šírka v každom bode pozdĺž trhliny sa počíta ako vzdialenosť medzi dvomi sub-pixelovými polohami hrán meranými kolmo na stredovú líniu trhliny. Zmena šírky je potom rozdiel medzi etapami v každom bode a priemerný nárast šírky pozdĺž dĺžky segmentu trhliny je sumárna štatistika. Pre letiskové merania vozoviek s GSD 1 mm je zmena šírky trhliny 0,2–0,3 mm spoľahlivo detekovateľná pomocou sub-pixelových metód s presnosťou lokalizácie hrán 0,1 pixelu.
Predĺženie dĺžky trhliny meria nárast celkovej dĺžky siete trhlín. To si vyžaduje vektorizáciu kostry trhliny v každej etape ako množinu polylínií a potom párovanie segmentov trhlín medzi etapami pomocou kritérií priestorového prekrytia a blízkosti. Nové predĺženie trhliny sa prejavuje ako segmenty trhlín v následnom meraní, ktoré sa neprekrývajú so žiadnym segmentom trhliny v základnom meraní, ale sú pripojené k existujúcim trhlinám. Miera rastu trhlín — mm za mesiac alebo mm za rok — sa počíva vydelením celkového nárastu dĺžky časovým intervalom medzi meraniami. Pre diaľničné a letiskové vozovky sa typické miery rastu trhlín pohybujú od 0,5 do 5 mm za mesiac v závislosti od dopravného zaťaženia, environmentálnych podmienok a štrukturálnej kapacity vozovky.
Detekcia nových trhlín
Detekcia nových trhlín identifikuje pixely alebo objekty trhlín, ktoré sa objavia v následnom meraní, ale v základnom meraní chýbali. Vyžaduje rozlíšenie skutočne nových trhlín od falošne pozitívnych výsledkov spôsobených chybou registrácie, rozdielmi v osvetlení alebo artefaktmi povrchovej vlhkosti. Proces detekcie typicky zahŕňa nasledujúce kroky:
Generovanie základnej masky trhlín pomocou validovaného modelu detekcie trhlín so známou mierou falošne pozitívnych výsledkov. Základná maska by mala konzervatívne nadsegmentovať skôr než podsegmentovať — zahrnutie neistých kandidátov na trhliny znižuje šancu, že sa zmeškajú nové trhliny, ktoré boli v základnom meraní čiastočne viditeľné.
Generovanie masky trhlín následného merania pomocou rovnakého modelu detekcie trhlín a rovnakých parametrov spracovania aplikovaných na koregistrovaný ortomozail následného merania. Konzistentné používanie detekčného algoritmu je nevyhnutné; zmeny v detekčnom modeli alebo parametroch spracovania medzi etapami by zaviedli nefyzické signály zmien.
Výpočet masky zmien identifikáciou pixelov, ktoré sú v maske následného merania trhlinou, ale v základnej maske nie sú trhlinou. Morfologické otvorenie (erózia nasledovaná dilatáciou) odstraňuje izolovaný pixelový šum a tenké artefakty na okrajoch trhlín spôsobené sub-pixelovou chybou registrácie.
Geometrické filtrovanie eliminuje objekty zmien, ktoré nespĺňajú kritériá geometrie trhlín — minimálna dĺžka (typicky >10 pixelov), minimálny pomer strán (pomer dĺžky k šírke >3) a prepojenie s existujúcimi sieťami trhlín. Izolované zhluky pixelov, ktoré netvoria lineárne prvky, sú klasifikované ako artefakty netrhlínového charakteru.
Validácia voči manuálnej inšpekcii alebo pozemnej pravde pre vzorku detegovaných zmien na kalibráciu miery falošne pozitívnych výsledkov a úpravu detekčných parametrov.
Minimálna detekovateľná šírka novej trhliny je približne GSD snímky — typicky 1–2 mm pre merania dráh. Trhliny užšie ako GSD môžu byť stále detekovateľné, ak produkujú merateľný rozdiel intenzity (kontrast) v obraze, ale spoľahlivosť detekcie klesá pre trhliny so šírkou pod úrovňou pixelu. Pipeline detekcie zmien trhlín TarmacView dosahuje 90–95 % mieru detekcie pre nové trhliny širšie ako 2 mm pri GSD 1 mm, s mierou falošne pozitívnych výsledkov pod 5 % pre typické povrchy letiskových vozoviek.
Detekcia zmien vydrolení a korózie
Zmena plochy vydrolení
Vydrolenie — fragmentácia a oddelenie povrchového materiálu z betónu alebo muriva — vytvára viditeľné depresie, odkryté kamenivo a ostré hrany na rozhraní medzi zdravým a znehodnoteným materiálom. Detekcia zmien vydrolení kvantifikuje nárast plochy, hĺbky a obvodu vydrolenia v čase. Na rozdiel od detekcie trhlín, ktorá pracuje s lineárnymi prvkami, detekcia vydrolení vyžaduje presné vymedzenie nepravidelných plošných prvkov.
Detekcia zmien vydrolení používa porovnanie založené na segmentácii medzi etapami merania. Hranica vydrolenia v každom ortomozaili je vymedzená buď manuálne inšpektormi, semi-automaticky pomocou interaktívnych nástrojov segmentácie (grab cut, watershed alebo algoritmy aktívnych kontúr), alebo plne automaticky pomocou modelov hlbokého učenia na segmentáciu (Mask R-CNN, DeepLab alebo UNet trénované na datasetoch vydrolení). Keď sú hranice vydrolení extrahované ako polygóny v každej etape, vypočítajú sa metriky zmien:
Zmena plochy = Plocha_nasledná - Plocha_základná (typicky uvádzaná v cm² alebo m²). Miera rastu plochy = Zmena plochy / časový interval (cm²/mesiac alebo m²/rok). Zmena obvodu meria komplexnosť hranice vydrolenia, ako postupuje do predtým zdravého materiálu. Radiálny rast meria maximálnu vzdialenosť od pôvodnej hranice vydrolenia k novej hranici v ľubovoľnom smere, čo indikuje smer najrýchlejšieho zhoršovania.
Pre betónové konštrukcie sa miery rastu vydrolení výrazne líšia v závislosti od mechanizmu príčiny. Vydrolenia spôsobené delamináciou vyvolanou koróziou typicky rastú rýchlosťou 1–5 cm radiálneho predĺženia za rok v agresívnom prostredí. Vydrolenia spôsobené pôsobením mrazu a rozmrazovania vykazujú sezónne vzorce rastu sústredené v zime a na jar. Vydrolenia spôsobené nárazom alebo preťažením sú typicky náhleho nástupu a môžu zostať stabilné, ak je príčina zaťaženia odstránená.
Mapovanie šírenia korózie
Detekcia zmien korózie identifikuje oblasti, kde sa produkty korózie (hrdza na oceli, oxidačné škvrny na betóne) objavili, rozšírili alebo zintenzívnili medzi etapami merania. Korózia sa prejavuje ako charakteristické sfarbenie — oranžové, hnedé alebo červenohnedé na oceľových povrchoch; hrdzavé škvrny na betónových povrchoch — ktoré je detekovateľné v snímkach viditeľného spektra. Spektrálny signatúra korózie je odlišná od väčšiny ostatných povrchových prvkov, čo umožňuje pomerne robustnú detekciu.
Výpočet korózneho indexu konvertuje RGB snímky na metriku citlivú na koróziu. Bežné indexy zahŕňajú: pomer Červená/Zelená (skorodované oblasti majú vyššiu červenú reflexiu voči zelenej); normalizovaný korózny index NCI = (Červená - Zelená) / (Červená + Zelená); a hrdzový index RI = (2 × Červená - Zelená - Modrá) normalizovaný intenzitou. Tieto indexy sú prahované na vytvorenie binárnych máp korózie v každej etape.
Zmena pokrytia koróziou je percentuálny nárast oblasti ovplyvnenej koróziou voči celkovej ploche. Pre oceľové mosty a komponenty je prah detekcie zmien typicky 1–2 % celkovej plochy pre významnú progresiu korózie. Pre betónové povrchy so škvrnami sa používajú menšie plošné prahy (0,5–1 %), pretože škvrny sú často priestorovo rozptýlenejšie ako jamková korózia na oceli.
Zmena závažnosti korózie kategorizuje progresiu korózie podľa úrovne závažnosti v súlade s normami, ako je ISO 4628-3 (Farby a laky — Hodnotenie degradácie náterov — Časť 3: Stupeň hrdzavenia) alebo SSPC-VIS 2 (Štandard na hodnotenie stupňa hrdzavenia na natretých oceľových povrchoch). Detekcia zmien priraďuje úroveň závažnosti každej koróznej škvrne v každej etape a označuje škvrny, ktoré medzi meraniami postúpili na vyššiu úroveň závažnosti. Úrovne závažnosti sú založené na percentuálnom podiele viditeľného povrchu ovplyvneného hrdzou: Ri0 (0 %), Ri1 (<0,05 %), Ri2 (0,05–0,5 %), Ri3 (0,5–1 %), Ri4 (1–5 %), Ri5 (>5 %) podľa ISO 4628-3.
Detekcia zmien mračna bodov
Porovnanie Cloud-to-Cloud (C2C)
Vzdialenosť Cloud-to-Cloud (C2C) je najjednoduchšia metóda na porovnanie dvoch mračien bodov. Pre každý bod v referenčnom mračne sa nájde najbližší sused v cieľovom mračne a vypočíta sa Euklidovská vzdialenosť medzi nimi. Výsledkom je hodnota vzdialenosti pre každý bod, ktorá môže byť vizualizovaná ako farebne odstupňovaná mapa vzdialeností, kde modrá indikuje žiadnu zmenu (takmer nulová vzdialenosť) a červená indikuje veľkú zmenu.
Výhodou C2C je výpočtová efektivita (O(n log n) s kd-stromovou akceleráciou) a koncepčná jednoduchosť. C2C má však zásadné obmedzenia pre detekciu zmien infraštruktúry. Po prvé, meria najkratšiu vzdialenosť k akémukoľvek bodu v cieľovom mračne, nie vzdialenosť v smere normály k povrchu, čo môže výrazne podceniť veľkosť deformácie na naklonených povrchoch. Po druhé, C2C je citlivé na variácie hustoty bodov medzi mračnami — mračno s vyššou hustotou bude systematicky vykazovať menšie vzdialenosti najbližšieho suseda bez ohľadu na fyzickú zmenu. Po tretie, C2C neposkytuje interval spoľahlivosti pre meranie vzdialenosti, čo sťažuje rozlíšenie skutočnej deformácie od šumu merania.
Z týchto dôvodov sa C2C najlepšie používa ako rýchla screeningová metóda na identifikáciu oblastí potenciálnej zmeny, po ktorej nasleduje rigoróznejšia analýza týchto oblastí pomocou sofistikovanejších metód. V praxi poskytuje C2C s prahom 2–3-násobku úrovne šumu mračna bodov konzervatívny screening detekcie zmien, ktorý zachytáva väčšinu významných zmien pri minimalizácii falošne pozitívnych výsledkov zo šumu a variácie hustoty.
Viacúrovňové porovnanie modelu s modelom (M3C2)
M3C2 je v súčasnosti najmodernejší algoritmus na detekciu zmien mračna bodov, vyvinutý autormi Lague, Brodu a Leroux (2013) a široko prijatý v geomorfológii a monitorovaní infraštruktúry. M3C2 rieši obmedzenia C2C výpočtom vzdialeností pozdĺž lokálneho normálového smeru povrchu v mierke zodpovedajúcej drsnosti povrchu, so štatisticky rigoróznymi intervalmi spoľahlivosti.
Algoritmus M3C2 funguje nasledovne:
Výpočet normálového vektora v každom bode referenčného mračna fitovaním roviny na lokálne okolie. Polomer okolia (D/2) sa volí tak, aby zodpovedal mierke analyzovaných povrchových prvkov — menšie polomery pre jemné prvky, ako sú trhliny, väčšie polomery pre široké deformačné vzory. Pre monitorovanie infraštruktúry sa typické polomery pohybujú od 10 cm pre podrobnú analýzu trhlín po 1 m pre celkové hodnotenie deformácie.
Projekcia a výpočet vzdialenosti pozdĺž normálového smeru. Pre každý bod v referenčnom mračne je valec s polomerom d (projekčná mierka) orientovaný pozdĺž normálového vektora. Identifikujú sa body z referenčného aj cieľového mračna, ktoré spadajú do tohto valca. Vzdialenosť medzi dvoma množinami bodov pozdĺž normálového smeru sa počíta ako rozdiel medzi ich priemernými polohami pozdĺž normálového vektora. Projekčná mierka d sa typicky nastavuje na 2–5-násobok priemerného rozstupu bodov, aby sa zabezpečil dostatočný počet bodov pre robustný výpočet priemeru.
Odhad intervalu spoľahlivosti pomocou lokálnej drsnosti mračna bodov a počtu bodov. Algoritmus M3C2 počíta 95% interval spoľahlivosti (alebo ľubovoľnú špecifikovanú úroveň spoľahlivosti) pre meranie vzdialenosti v každom bode na základe smerodajnej odchýlky bodov v rámci projekčného valca a počtu bodov. Zmeny menšie ako interval spoľahlivosti nie sú štatisticky významné a nemali by byť interpretované ako skutočná deformácia. Táto vstavaná štatistická kontrola kvality je kľúčovou výhodou M3C2 oproti jednoduchším metódam.
Viacúrovňová analýza umožňuje operátorovi analyzovať zmeny na viacerých priestorových mierkach súčasne. Analýza v jemnej mierke (malé D/2 a d) deteguje malé prvky, ako je otváranie trhlín a hranice vydrolení. Analýza v hrubej mierke (veľké D/2 a d) deteguje široké deformácie, ako je priehyb mosta a rozdielne sadanie. Porovnanie výsledkov naprieč mierkami dokáže rozlíšiť povrchovú zmenu (erózia, depozícia, vydrolenie) od deformácie (štrukturálny posun, naklonenie, sadanie).
Pre monitorovanie infraštruktúry dosahuje M3C2 detekčnú citlivosť 0,5–2 mm pre terestriálne laserové skenovacie mračná bodov s hustotou presahujúcou 500 bodov/m². Pre fotogrametrické mračná bodov (ktoré majú typicky viac šumu ako TLS dáta) je detekčná citlivosť 2–5 mm v závislosti od textúry povrchu, kvality obrazu a geometrie merania. Algoritmus je implementovaný v open-source softvéri CloudCompare a je štandardnou metódou pre detekciu zmien mračna bodov v infraštruktúrnych aplikáciách na celom svete.
Metóda detekcie zmien mračna bodov
Typický detekčný prah
Interval spoľahlivosti
Najlepšia aplikácia
C2C (Cloud-to-Cloud)
2–5 mm
Nie je k dispozícii
Rýchly screening, detekcia veľkých zmien
C2M (Cloud-to-Mesh)
1–3 mm
Čiastočný
Analýza deformácie oproti referenčnému povrchu
M3C2
0,5–2 mm (TLS), 2–5 mm (foto)
Áno (používateľský)
Kvantitatívne monitorovanie deformácií, rigorózna zmena
PCA na prvkoch mračna bodov
2–10 mm
Štatistické
Detekcia vzorov zmien, nielen veľkosti
Digitálny model elevácie rozdielu (DOD)
DOD porovnáva digitálne modely elevácie (DEM) alebo digitálne modely povrchu (DSM) vytvorené z mračien bodov v každej etape merania. Dva DEM sú odčítané na vytvorenie diferenčného rastru, kde každá hodnota pixelu predstavuje zmenu elevácie na danom mieste. DOD je výpočtovo efektívny, pretože pracuje na pravidelných mriežkach namiesto neštruktúrovaných mračien bodov, a výsledky sa ľahko vizualizujú a interpretujú ako tepelné mapy zmien elevácie.
Presnosť DOD závisí od kvality generovania DEM — interpolácia z nepravidelných mračien bodov na pravidelné mriežky zavádza dodatočnú neistotu. Úroveň detekcie (LoD) pre DOD sa počíta ako LoD = t × √(σ_základná² + σ_nasledná²), kde σ je neistota elevácie každého DEM a t je Studentova t-hodnota pre požadovanú úroveň spoľahlivosti (typicky t = 1,96 pre 95% spoľahlivosť). DOD je najvhodnejší na monitorovanie objemových zmien — strata materiálu eróziou alebo vydrolením, nahromadenie materiálu sedimentom alebo sutinami a rozsiahle sadanie alebo zdvih. Je menej vhodný na detekciu jemných defektov, kde sú potrebné detaily jednotlivých trhlín alebo vydrolení.
Kadencia opakovaných dronových meraní
Určenie frekvencie meraní
Optimálny interval medzi opakovanými meraniami pre detekciu zmien závisí od rýchlosti zhoršovania, kritickosti majetku, regulačných požiadaviek a minimálnej detekovateľnej zmeny meracieho systému. Základným princípom je, že interval merania by mal byť dostatočne krátky na to, aby očakávané zhoršenie počas intervalu presiahlo detekčný prah analýzy zmien, ale dostatočne dlhý na to, aby boli kumulatívne zmeny prevádzkovo zmysluplné a ekonomicky opodstatnené.
Pre letiskové vozovky v rámci rámcov zhody s ICAO Annex 14 je typická kadencia meraní:
Ročné merania pre všetky prevádzkové vozovky (dráhy, rolovacie dráhy, stojanky) ako súčasť bežného monitorovania stavu. Ročné merania stanovujú základnú mieru zhoršovania a identifikujú oblasti vyžadujúce častejšiu pozornosť. ICAO Annex 14, Sekcia 10.2 vyžaduje, že „povrch vozoviek sa musí kontrolovať v pravidelných intervaloch" a že „frekvencia kontrol sa určuje podľa typu a objemu dopravy a prevládajúcich klimatických podmienok."
Štvrťročné merania pre vozovky v zlom stave (PCI < 40) alebo so známym aktívnym zhoršovaním. Štvrťročná detekcia zmien sleduje účinnosť dočasnej údržby a poskytuje včasné varovanie pred rýchlym zhoršovaním, ktoré môže vyžadovať konštrukčný zásah.
Mesačné merania pre vozovky pod dohľadom pre kritické defekty — trhliny blízko okrajov vozovky, ktoré by mohli viesť k vydroleniu, oblasti aktívneho sadania alebo úseky vozovky vystavené vysoko namáhavým operáciám (napr. konce dráh, kde lietadlá odbočujú a pôsobia vysokým krútiacim momentom).
Pomerania po udalostiach po extrémnych poveternostných udalostiach (silné dažde, cykly mrazu a rozmrazovania, extrémne teplo), po neobvyklých udalostiach zaťaženia (lietadlá s nadváhou, tvrdé pristátia) alebo po zásahoch údržby na overenie účinnosti.
Pre mostové konštrukcie sú intervaly kontrol riadené národnými normami pre kontrolu mostov (napr. NBIS v Spojených štátoch, DIN 1076 v Nemecku, BASt smernice v Európe). Rutinné vizuálne kontroly sú typicky dvojročné, ale merania detekcie zmien pre známe defekty môžu byť vykonávané v rôznych frekvenciách:
Dvojročné merania pre mosty v dobrom stave bez známych významných defektov. Tie stanovujú základné miery zhoršovania na porovnanie s budúcimi meraniami.
Ročné merania pre mosty so známymi defektmi pod dohľadom — trhliny v kritických prvkoch, korózia v oceľových komponentoch, zraniteľnosť voči vymlievaniu alebo pohyb v ložiskách.
Štvrťročné až polročné merania pre mosty s aktívnym zhoršovaním monitorovaným z hľadiska rýchlosti progresie, overenie po oprave alebo mosty so zvyškovou životnosťou pod 5 rokov.
Požiadavky na konzistenciu dát
Spoľahlivá detekcia zmien naprieč opakovanými meraniami vyžaduje starostlivú kontrolu parametrov zberu údajov, aby sa minimalizovali nefyzické rozdiely medzi etapami. Kľúčové požiadavky na konzistenciu zahŕňajú:
Vzdialenosť vzorkovania na zemi (GSD) by mala byť konzistentná naprieč meraniami v rozmedzí 10–20 %. Významné zmeny GSD menia priestorové rozlíšenie, pri ktorom sa defekty merajú, a môžu zaviesť zdanlivé zmeny, ktoré sú čisto artefaktmi rozdielov v rozlíšení. Konzistencia GSD sa dosahuje lietaním v rovnakej výške s rovnakým kamerovým senzorom vo všetkých etapách merania.
Podmienky osvetlenia by mali byť čo najkonzistentnejšie. Merania vykonané na priamom slnku vytvárajú silné tiene z trhlín a povrchovej textúry, ktoré sa líšia od meraní pri zamračenom osvetlení. Odporúčaným postupom je vykonávať všetky opakované merania za podobných svetelných podmienok — najlepšie pri zamračení s difúznym osvetlením, ktoré minimalizuje tiene a poskytuje najrovnomernejší vzhľad povrchu pre detekciu defektov.
Povrchová vlhkosť by mala byť konzistentná. Mokré povrchy vozoviek vyzerajú výrazne odlišne od suchých — trhliny sa plnia vodou a stávajú sa menej viditeľnými, povrchové škvrny vyzerajú tmavšie a celková odrazivosť klesá. Merania by sa mali vykonávať iba vtedy, keď je povrch vozovky suchý (minimálne 48 hodín od posledného dažďa pre betón, 24 hodín pre asfalt).
Parametre kamery a senzora — expozičný čas, clona, ISO, zaostrovacia vzdialenosť — by mali byť konzistentné. Automatické nastavenia expozície (auto-expozícia, auto-ISO) by mali byť zakázané v prospech pevných nastavení určených počas plánovania merania, aby sa zabezpečila konzistentná rádiometria snímok naprieč etapami.
Letová dráha a prekrytie by mali nasledovať rovnaký misijný plán vo všetkých etapách merania. Použitie vopred naprogramovaných letových plánov s rovnakými waypointmi, výškou, rýchlosťou a nastaveniami prekrytia zabezpečuje konzistentnú geometriu snímania, čo zjednodušuje registráciu a znižuje geometrické rozdiely medzi meraniami.
Upozornenia detekcie zmien
Konfigurácia prahov upozornení
Upozornenia detekcie zmien prevádzajú kvantitatívne merania zmien na akčné notifikácie pre manažérov infraštruktúry. Prahy upozornení definujú veľkosť zmeny, ktorá spúšťa notifikáciu, kategorizovanú podľa úrovne závažnosti na podporu primeraného prioritizovania odozvy. Konfigurácia prahov závisí od typu defektu, kritickosti majetku a prevádzkového kontextu.
Pre upozornenia na rast trhlín sú prahy typicky založené na náraste šírky trhliny:
Úroveň sledovania — nárast šírky trhliny o 0,3–0,5 mm medzi meraniami. Indikuje možnú aktívnu tvorbu trhlín. Nevyžaduje okamžitý zásah, ale odporúča sa zvýšená frekvencia monitorovania. Overenie pozemnou inšpekciou pri najbližšej plánovanej návšteve.
Úroveň varovania — nárast šírky trhliny o 0,5–1,5 mm medzi meraniami. Indikuje potvrdenú aktívnu tvorbu trhlín. Odporúča sa inžinierske hodnotenie na určenie príčiny a posúdenie štrukturálnych dôsledkov. Naplánovať podrobnú inšpekciu do 30–60 dní.
Úroveň alarmu — nárast šírky trhliny presahujúci 1,5 mm medzi meraniami (alebo akákoľvek jednotlivá šírka trhliny presahujúca 5 mm, podľa smerníc závažnosti ASTM D5340). Indikuje rýchlo postupujúce zhoršovanie. Vyžaduje okamžité inžinierske hodnotenie. Obmedziť zaťaženie, ak je trhlina v kritickom konštrukčnom prvku. Naplánovať opravu do 30 dní.
Pre upozornenia na rast vydrolení sú prahy založené na náraste plochy:
Úroveň sledovania — nárast plochy vydrolenia o 10–25 % v porovnaní so základným stavom. Monitorovať pri najbližšom cykle merania.
Úroveň varovania — nárast plochy vydrolenia o 25–50 % alebo hĺbka vydrolenia presahujúca hrúbku krytia. Naplánovať podrobné posúdenie. Vyhodnotiť prítomnosť voľného materiálu, ktorý by sa mohol stať FOD (cudzí predmet) na letiskových vozovkách.
Úroveň alarmu — nárast plochy vydrolenia presahujúci 50 % v porovnaní so základným stavom, alebo akékoľvek nové vydrolenie presahujúce 25 cm v maximálnom rozmere na letiskových vozovkách (podľa smerníc ICAO pre cudzie predmety). Vyžaduje okamžitú pozemnú inšpekciu. Odstrániť voľný materiál. Naplánovať opravu do 7–14 dní.
Pre upozornenia na šírenie korózie sú prahy založené na zmene pokrytia a kategórie závažnosti:
Úroveň sledovania — nárast pokrytia koróziou o 5–15 % postihnutej oblasti alebo progresia z Ri2 na Ri3 podľa ISO 4628-3. Monitorovať pri najbližšom meraní.
Úroveň varovania — nárast pokrytia koróziou o 15–30 % alebo progresia z Ri3 na Ri4. Inžinierske hodnotenie stavu náteru a integrity podkladu. Naplánovať prenáter do 6–12 mesiacov.
Úroveň alarmu — pokrytie koróziou presahujúce 30 % alebo progresia na Ri5. Okamžité hodnotenie nosnosti. Pre oceľové mostné prvky posúdenie straty prierezu pomocou ultrazvukového merania hrúbky. Naplánovať zásah do 1–3 mesiacov.
Viacúrovňový rámec upozornení
Efektívny systém upozornení detekcie zmien pracuje na viacerých kaskádových úrovniach, aby sa predišlo zahlteniu manažérov infraštruktúry notifikáciami pri súčasnom zabezpečení, že kritické zmeny nie sú prehliadnuté:
Úroveň 1 — Štatistické upozornenie sa spúšťa, keď veľkosť zmeny presahuje štatistický prah odvodený zo šumu merania. Toto je najnižšia úroveň upozornenia, indikujúca, že pozorovaná zmena je štatisticky významná (presahuje 95% interval spoľahlivosti meracieho systému). Počas bežného monitorovania sa očakáva veľa upozornení úrovne 1 a nevyžadujú okamžitú pozornosť.
Úroveň 2 — Prevádzkové upozornenie sa spúšťa, keď veľkosť zmeny presahuje vopred definovaný prah, ktorý skúsenosť ukázala ako indikujúci aktívne zhoršovanie vyžadujúce pozornosť. Prevádzkové upozornenia sú špecifické pre každý majetok a typ defektu, kalibrované na základe historických údajov o zhoršovaní a záznamov o údržbe.
Úroveň 3 — Kritické upozornenie sa spúšťa, keď veľkosť zmeny indikuje okamžitý bezpečnostný problém — rýchly rast trhliny v kritickom konštrukčnom prvku, náhle sadanie mostného oporu alebo vznik vydrolenia, ktoré by mohlo generovať FOD na aktívnej dráhe. Kritické upozornenia vyžadujú okamžité informovanie zodpovedných osôb a urýchlenú odozvu v priebehu hodín až dní.
Rámec upozornení by mal tiež zahŕňať časovú konzistenciu — zmeny, ktoré pretrvávajú alebo rastú naprieč viacerými etapami merania, dostávajú vyššiu prioritu ako izolované zmeny, ktoré neprogredujú. Trhlina, ktorá vykazuje rast 0,4 mm v jednom intervale merania, ale stabilizuje sa v nasledujúcom, by mala byť degradovaná z Varovania na Sledovanie, zatiaľ čo trhlina vykazujúca konzistentný rast 0,3–0,5 mm v každom z troch po sebe nasledujúcich meraní by mala byť eskalujúca.
Integrácia s modelmi zhoršovania
Od detekcie zmien k predikcii zhoršovania
Dáta detekcie zmien poskytujú empirický základ pre modely zhoršovania, ktoré predpovedajú budúce stavy a zvyškovú životnosť. Integrácia detekcie zmien s modelovaním zhoršovania transformuje reaktívnu údržbu — opravovanie defektov, keď dosiahnu kritický stav — na proaktívne plánovanie údržby založené na stave, kde sú zásahy plánované na základe predpokladaných trajektórií zhoršovania.
Empirické krivky zhoršovania sa vytvárajú vynesením výsledkov detekcie zmien z viacerých etáp merania. Pre každý typ defektu a konštrukčný prvok sa miera zmeny (rast šírky trhliny v mm/rok, rast plochy vydrolenia v cm²/rok, nárast pokrytia koróziou v %/rok) počíta z časového radu meraní. Tieto empirické miery sa potom používajú na projekciu budúcich stavov pri predpoklade pokračujúceho zhoršovania pozorovanou rýchlosťou. Pre letiskové vozovky je krivka zhoršovania indexu stavu vozovky (PCI) typicky modelovaná ako exponenciálny pokles: PCI(t) = PCI_počiatočný × exp(-k × t), kde k je konštanta rýchlosti zhoršovania odvodená z meraní detekcie zmien naprieč viacerými cyklami merania.
Pravdepodobnostné modely zhoršovania zahŕňajú neistotu v meraní aj predikcii. Detekcia zmien poskytuje nielen veľkosť zmeny, ale aj interval spoľahlivosti pre toto meranie (z M3C2 alebo zo štatistickej analýzy zmien). Tieto neistoty sa prenášajú do modelu zhoršovania, čím vytvárajú medze spoľahlivosti pre predpokladaný budúci stav. Markovský reťazový model napríklad používa údaje detekcie zmien na odhad prechodových pravdepodobností medzi stavmi, s intervalmi spoľahlivosti odrážajúcimi neistotu merania v každej etape.
Predikcia zhoršovania pomocou strojového učenia používa časovú postupnosť meraní detekcie zmien ako vstupné prvky na predikciu budúceho stavu. Rekurentné neurónové siete (RNN) a siete s dlhodobou krátkodobou pamäťou (LSTM) sú obzvlášť vhodné na túto úlohu, pretože sa učia časové vzory priamo z postupnosti meraní. Vstupné prvky zahŕňajú časové rady šírky trhlín, časové rady plochy vydrolení, hodnoty PCI a environmentálne kovariáty (teplotné cykly, zrážky, udalosti mrazu a rozmrazovania). Výstupom modelu je predpokladaný stav v budúcich časových bodoch s príslušnými predikčnými intervalmi.
Spätná väzba s údržbovými zásahmi
Detekcia zmien tiež umožňuje kvantitatívne hodnotenie účinnosti údržby prostredníctvom porovnania pred a po. Keď je defekt opravený — trhlina zalepená, vydrolenie opravené, korózia ošetrená — analýza detekcie zmien medzi meraním pred opravou a prvým meraním po oprave overí, že defekt už nie je prítomný. Následné merania sledujú, či oprava zostáva účinná alebo či sa defekt opakuje.
Sledovanie trvanlivosti opráv naprieč viacerými cyklami merania poskytuje údaje o strednom čase do opätovného objavenia sa defektov po rôznych metódach opravy. Tieto údaje informujú plánovanie údržby identifikáciou najtrvanlivejších stratégií opráv pre každý typ defektu pri špecifických environmentálnych a zaťažovacích podmienkach. Napríklad, ak detekcia zmien odhalí, že zalepenie trhlín na konkrétnom úseku dráhy má stredný čas rekurencie 18 mesiacov, zatiaľ čo frézovanie a zalepenie má stredný čas rekurencie 36 mesiacov, vyššie počiatočné náklady frézovania a zalepenia sú opodstatnené predĺženou životnosťou.
Zmluvy o údržbe založené na výkonnosti používajú údaje detekcie zmien na overenie, že dodávatelia údržby dosiahli špecifikované výkonnostné výsledky. Zmluva môže špecifikovať, že šírka trhlín v ošetrených oblastiach nesmie presiahnuť 125 % šírky po oprave po dobu najmenej 24 mesiacov. Merania detekcie zmien 6, 12 a 24 mesiacov po oprave poskytujú objektívne overenie zhody, pričom platba je viazaná na preukázaný výkon, nie iba na dokončenie prác.
Softvér a automatizácia pre detekciu zmien
Komerčné a open-source nástroje
CloudCompare je primárny open-source softvér na detekciu zmien mračna bodov, implementujúci metódy M3C2, C2C, C2M (Cloud-to-Mesh) a DOD. Podporuje formáty LAS, LAZ, PLY a ďalšie bežné formáty mračna bodov, poskytuje dávkové spracovanie pre automatizované pipeline a zahŕňa vizualizačné nástroje pre farebne odstupňované mapy zmien. CloudCompare beží na Windows, macOS a Linux a je de facto štandardom pre analýzu zmien mračna bodov v monitorovaní infraštruktúry.
Agisoft Metashape podporuje porovnanie ortomozailov a DEM pre detekciu zmien prostredníctvom svojho workflow na výpočet rozdielov medzi spracovanými projektmi. Softvér poskytuje automatickú registráciu snímok naprieč meraniami pomocou spoločnej siete GCP a výsledné ortomozaily je možné porovnávať pixelovo alebo prostredníctvom vstavaného nástroja na diferenciu DEM. Python API Metashape umožňuje skriptovanie workflow detekcie zmien pre dávkové spracovanie viacerých párov meraní.
Pix4Dmapper a Pix4Dmatic zahŕňajú možnosti porovnania ortomozailov a DSM s automatickými správami detekcie zmien, ktoré zvýrazňujú oblasti s významným rozdielom elevácie. Kvalitatívna správa Pix4D zahŕňa odhady presnosti pre každý pixel, ktoré informujú štatistickú významnosť detegovaných zmien.
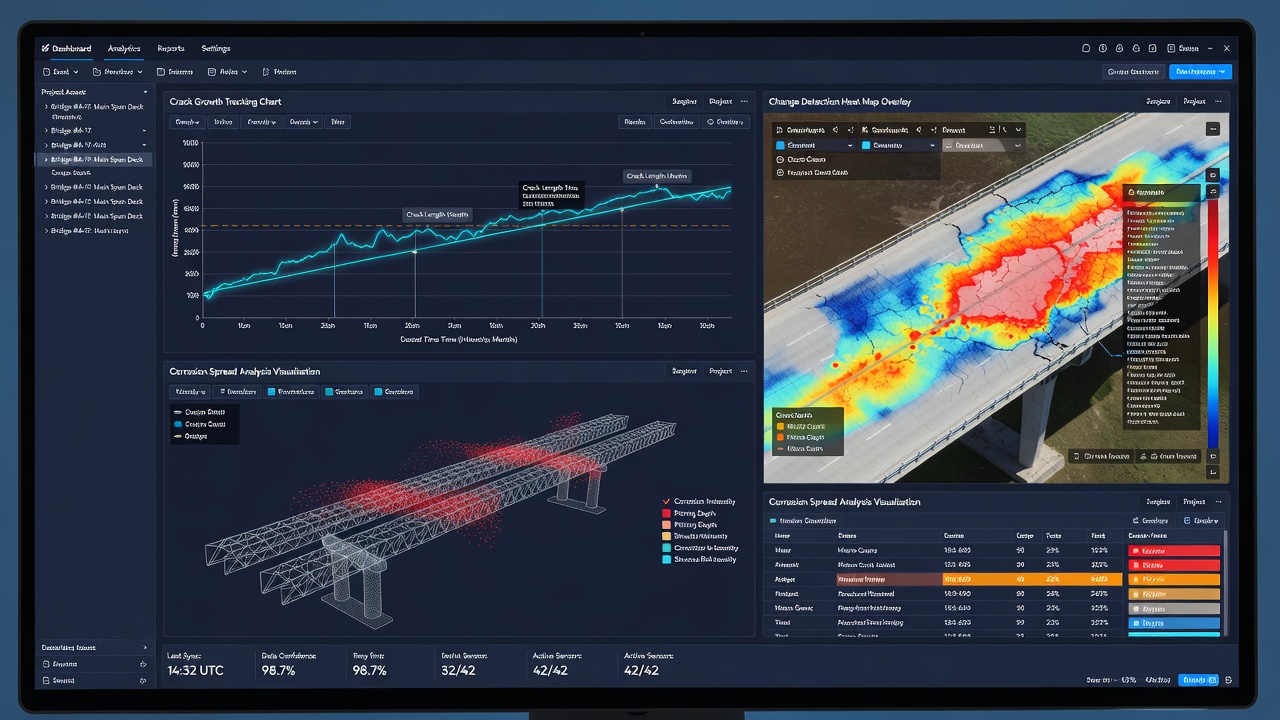
TarmacView poskytuje špecializovanú detekciu zmien pre infraštruktúru letiskových vozoviek, porovnáva ortomozaily a mapy trhlín naprieč opakovanými meraniami s automatickou klasifikáciou zmien. Platforma sleduje rast trhlín (šírka a dĺžka), tvorbu nových trhlín, zmeny plochy vydrolení a trendy zhoršovania PCI. Výsledky detekcie zmien sú vizualizované ako prekryvné mapy na aktuálnom ortomozaili, s farebne odstupňovanou závažnosťou zmien a automatickým generovaním upozornení pre zmeny presahujúce konfigurovateľné prahy.
Automatizované spracovateľské pipeline
Plná automatizácia detekcie zmien vyžaduje integrovaný pipeline, ktorý spracúva všetky kroky od príjmu dát po generovanie správ:
Krok 1 — Príjem dát: Importovať nové údaje z merania (snímky, GNSS logy, súradnice GCP) a získať zodpovedajúce základné údaje z databázy majetku. Overiť, že obe merania pokrývajú rovnakú oblasť majetku a spĺňajú požiadavky na kvalitu.
Krok 2 — Registrácia: Vykonať automatickú registráciu nového ortomozailu alebo mračna bodov k základnej referencii. Pre ortomozaily použiť registráciu založenú na prvkoch s prvkami SIFT alebo AKAZE, po ktorej nasleduje jemná registrácia založená na intenzite. Pre mračná bodov aplikovať hrubú registráciu pomocou GCP alebo ICP (Iterative Closest Point) a následne jemnú registráciu.
Krok 3 — Výpočet zmien: Aplikovať vybranú metódu detekcie zmien — diferencovanie snímok pre zmeny intenzity, M3C2 pre deformáciu mračna bodov, porovnanie založené na objektoch pre zmeny trhlín a vydrolení. Vypočítať štatistiky zmien s intervalmi spoľahlivosti.
Krok 4 — Klasifikácia: Klasifikovať detegované zmeny podľa typu (rast trhliny, nová trhlina, šírenie vydrolenia, korózia, deformácia), úrovne závažnosti a priestorovej polohy. Priradiť každý objekt zmeny k príslušnému komponentu majetku.
Krok 5 — Generovanie upozornení: Porovnať veľkosti zmien s nakonfigurovanými prahmi pre každý typ defektu a lokalitu. Generovať upozornenia úrovne 1, 2 alebo 3 podľa potreby. Zaznamenať upozornenia v systéme správy majetku s priestorovou referenciou, veľkosťou zmeny, intervalom spoľahlivosti a časovou pečiatkou.
Krok 6 — Generovanie správ: Vytvoriť správy o detekcii zmien, ktoré zahŕňajú mapy zmien (prekryv na aktuálnom ortomozaili), sumárne štatistiky (celková zmena dĺžky trhlín, počet nových defektov, trend PCI), podrobné údaje o zmenách pre jednotlivé defekty (história šírky trhlín, história plochy vydrolení) a odporúčané opatrenia na základe úrovní upozornení.
Krok 7 — Aktualizácia databázy: Aktualizovať databázu stavu majetku s novými výsledkami detekcie zmien. Pripojiť časové rady údajov pre každý defekt a prvok majetku. Aktualizovať krivky zhoršovania s novým meracím bodom. Prepočítať predpokladaný stav a zvyškovú životnosť, ak sú integrované modely zhoršovania.
Zabezpečenie kvality pre automatizovanú detekciu zmien
Automatizovaná detekcia zmien vyžaduje systematické zabezpečenie kvality, aby sa zabezpečilo, že hlásené zmeny sú skutočné a nie artefakty chýb spracovania:
Kontrola kvality registrácie: RMSE registrácie medzi meraniami musí byť pod projektovým prahom (typicky 0,5 pixelu pre ortomozaily, 0,5 cm pre mračná bodov). Ak je kvalita registrácie nedostatočná, výsledky detekcie zmien sú označené na manuálne preskúmanie.
Screening falošne pozitívnych výsledkov: Výsledky detekcie zmien sú preverené oproti známym indikátorom bez zmeny: oblasti stojatej vody (detegované blízkou infračervenou alebo termálnou snímkou), oblasti nedávnej údržby (zaznamenané v systéme správy majetku) a oblasti so známou kontamináciou povrchu (olejové škvrny, nahromadenie gumy na dráhach).
Kontrola časovej konzistencie: Zmeny, ktoré sa objavia v jednom intervale merania, ale nie sú potvrdené v nasledujúcich meraniach, sú označené ako potenciálne prechodné — povrchové škvrny, ktoré sa zmyjú, vzory vlhkosti, ktoré sa menia s počasím, alebo suť, ktorá je odstránená. Pretrvávajúce zmeny získavajú vyššie hodnotenie spoľahlivosti.
Vzorka manuálneho preskúmania: Štatisticky platná vzorka detegovaných zmien je preskúmaná kvalifikovaným inšpektorom pre každý cyklus merania. Veľkosť vzorky je vypočítaná na dosiahnutie 95% spoľahlivosti, že miera falošne pozitívnych výsledkov automatického systému je pod prijateľným prahom (typicky 5–10 % pre upozornenia na úrovni sledovania, 1–2 % pre upozornenia na úrovni alarmu).
Záver
Detekcia zmien transformuje inšpekciu infraštruktúry zo statickej snímky stavu na dynamický časový záznam zhoršovania, opráv a štrukturálneho správania. Presnou koregistráciou snímok a mračien bodov z opakovaných meraní detekcia zmien kvantifikuje jemnú, milimetrovú progresiu trhlín, vydrolení, korózie a deformácií, ktorá by bola v jednej inšpekcii neviditeľná, ale v kumulácii v čase určuje životnosť majetku.
Metodika integruje rigoróznu geometrickú registráciu — založenú na prvkoch, intenzite alebo georeferencovanú pomocou GCP — so štatistickou analýzou zmien, ktorá oddeľuje skutočné zhoršovanie od šumu merania. Výber metódy detekcie zmien závisí od typu defektu a požadovanej citlivosti: diferencovanie snímok pre zmeny vzhľadu povrchu, M3C2 pre deformáciu mračna bodov, porovnanie založené na objektoch pre geometrické zmeny trhlín a vydrolení a metódy strojového učenia pre automatickú klasifikáciu s vysokou presnosťou.
Pre letiskové vozovky, mosty a kritickú infraštruktúru poskytuje detekcia zmien dátový základ pre údržbu založenú na stave, modelovanie zhoršovania a alokáciu rozpočtu na základe rizika. Umožňuje manažérom infraštruktúry identifikovať zrýchľujúce sa zhoršovanie skôr, než dosiahne kritické úrovne, overiť účinnosť zásahov údržby a optimalizovať načasovanie a rozsah opráv. Integrácia detekcie zmien s automatizovanými spracovateľskými pipeline, rámcami upozornení a modelmi zhoršovania vytvára uzavretý systém riadenia stavu, ktorý nepretržite zlepšuje kvalitu rozhodnutí o údržbe prostredníctvom empirických dôkazov o rýchlostiach zhoršovania a trvanlivosti opráv.
TarmacView implementuje detekciu zmien ako kľúčovú schopnosť svojej platformy na inšpekciu letiskových vozoviek, čo umožňuje automatizované sledovanie rastu trhlín, šírenia vydrolení a trendov stavu pri postupných dronových meraniach. Platforma aplikuje rigoróznu registráciu a štatistickú kontrolu kvality, aby zabezpečila, že hlásené zmeny sú skutočné a akčné, poskytujúc manažérom infraštruktúry kvantitatívne dôkazy pre plánovanie údržby a vykazovanie zhody podľa noriem ICAO Annex 14 a ASTM D5340.
Často kladené otázky
Detekcia zmien je technika časovej analýzy, ktorá porovnáva koregistrované snímky, ortomozaily alebo mračná bodov tej istej infraštruktúry nasnímané v rôznych časoch. Identifikuje a kvantifikuje rozdiely, ako sú nové trhliny, rast trhlín, zväčšovanie vydrolení, šírenie korózie, povrchová deformácia a sadanie. Proces vyžaduje presnú registráciu snímok alebo zarovnanie mračna bodov tak, aby sa v diferenčnej analýze objavili iba skutočné fyzické zmeny — nie artefakty spôsobené nesprávnym zarovnaním.
Pre detekciu zmien na úrovni pixelov by presnosť registrácie mala byť sub-pixelová — typicky lepšia ako 0,5 pixelu RMSE. Pri vzdialenosti vzorkovania na zemi (GSD) 1 mm/pixel to zodpovedá presnosti registrácie 0,5 mm. Chyby registrácie väčšie ako 1 pixel vytvárajú falošné signály zmien na hranách a textúrových rozhraniach, ktoré môžu prekryť skutočné zmeny defektov. Registrácia založená na prvkoch s použitím mierkovo invariantných prvkov a RANSAC odmietania odľahlých hodnôt bežne dosahuje presnosť 0,3–0,8 pixelu. RTK/PPK geotagging v kombinácii s GCP umožňuje konzistentnú sub-pixelovú registráciu naprieč opakovanými meraniami.
Detekcia zmien trhlín typicky kombinuje analýzu na úrovni pixelov a na úrovni objektov. Metódy na úrovni pixelov detegujú zmeny v hustote pixelov trhlín v rámci lokálneho okolia medzi časovými krokmi. Metódy na úrovni objektov najprv vektorizujú trhliny v každej etape merania, potom porovnávajú mapy trhlín výpočtom zmien šírky na zodpovedajúcich miestach, predĺženia existujúcich trhlín a hustoty tvorby nových trhlín. Modul LTCCD (Lie-group-based Temporal Crack Change Detection) a metódy riadené PDE sú pokročilé prístupy, ktoré sledujú vývoj trhlín so sub-pixelovou presnosťou modelovaním okrajov trhlín ako propagujúcich sa frontov.
Multiscale Model-to-Model Cloud Comparison (M3C2) je štatisticky rigorózny algoritmus na výpočet vzdialeností medzi dvoma mračnami bodov. Na rozdiel od jednoduchých metód najbližšieho suseda, M3C2 počíta vzdialenosti pozdĺž lokálneho normálového smeru povrchu vo viacerých mierkach a poskytuje intervaly spoľahlivosti pre každé meranie vzdialenosti. Zohľadňuje drsnosť mračna bodov, variáciu hustoty a neistotu registrácie. M3C2 je štandardnou metódou pre monitorovanie deformácií z opakovaných LiDAR alebo fotogrametrických meraní, dosahujúcou sub-milimetrovú citlivosť, keď hustota mračna bodov presahuje 500 bodov/m².
Kadencia meraní závisí od rýchlosti zhoršovania, kritickosti majetku a regulačných požiadaviek. Pre letiskové vozovky podľa ICAO Annex 14 sú vizuálne inšpekcie zvyčajne ročné, ale merania detekcie zmien pre aktívne zóny zhoršovania môžu byť štvrťročné alebo mesačné. Mostové dosky so známym trhlinami môžu byť merané každých 6 mesiacov počas aktívneho zhoršovania a každé 2–3 roky pre bežné sledovanie stavu. Minimálna detekovateľná zmena je približne 2,5–3-násobok presnosti merania (95% spoľahlivosť), preto by sa frekvencia meraní mala kalibrovať tak, aby očakávané zhoršenie počas intervalu presahovalo detekčný prah.
Upozornenia detekcie zmien používajú viacúrovňové prahy: (1) prahy veľkosti zmeny na úrovni pixelov na filtrovanie šumu; (2) minimálne prahy plochy priestorového zhlukovania na elimináciu izolovaných pixelových artefaktov; (3) kontroly časovej konzistencie vyžadujúce, aby zmeny pretrvávali alebo rástli naprieč viacerými meraniami; a (4) klasifikácia závažnosti (napr. nárast šírky trhliny >0,5 mm spúšťa sledovanie, >1,5 mm spúšťa alarm). Upozornenia sa typicky konfigurujú podľa typu defektu — upozornenia na rast trhlín používajú prahy nárastu šírky, upozornenia na vydrolenia používajú prahy nárastu plochy a upozornenia na deformácie používajú prahy veľkosti posunu.
Áno. Pracovné postupy detekcie zmien zvyčajne klasifikujú detegované zmeny do troch kategórií: (1) nové defekty — oblasti, ktoré boli klasifikované ako zdravé v základnom meraní, ale vykazujú pixely trhlín alebo vydrolení v následnom meraní; (2) zhoršujúce sa defekty — existujúce trhliny, ktoré sa zväčšili v šírke, dĺžke alebo hustote; a (3) opravené defekty — oblasti, kde predtým identifikované defekty už nie sú prítomné po údržbe. Táto klasifikácia vyžaduje presnú koregistráciu máp defektov naprieč etapami merania, typicky pomocou vektorizovaných sietí trhlín alebo pixelových označení defektov s časovou korešpondenciou.
Niekoľko platforiem podporuje detekciu zmien infraštruktúry: CloudCompare (open-source) implementuje algoritmy M3C2, C2C a C2M na porovnávanie mračien bodov; Metashape a Pix4D podporujú porovnávanie ortomozailov a DSM diferenciu; Cyclone Register 3D a FARUS Scene spracúvajú časové rady LiDAR. TarmacView poskytuje špecializovanú detekciu zmien pre letiskové vozovky, porovnáva ortomozaily a mapy trhlín naprieč opakovanými meraniami s automatickou klasifikáciou zmien, meraním rastu trhlín a analýzou trendov podľa noriem ASTM D5340 a ICAO.
Automatizovaná detekcia zmien pre infraštruktúru
TarmacView umožňuje automatizovanú detekciu zmien pri opakovaných dronových meraniach letiskových vozoviek, mostov a infraštruktúry. Sledujte rast trhlín, zväčšovanie vydrolení a trendy zhoršovania s kvantitatívnou presnosťou. Identifikujte zmeny včas a optimalizujte plánovanie údržby.
Zhoršovanie v letectve označuje postupný úbytok infraštruktúry, lietadiel alebo ľudskej výkonnosti v dôsledku environmentálnych, prevádzkových alebo vekových fa...
Detekcia trhlín pomocou AI pre kontrolu infraštruktúry
Detekcia trhlín pomocou AI využíva počítačové videnie — konvolučné neurónové siete, vision transformery a modely sémantickej segmentácie — na automatickú identi...
Preskúmajte kľúčové pojmy leteckej údržby: výmena, náhrada komponentov a riadenie údržby. Spoznajte regulačné požiadavky, osvedčené postupy a digitálne systémy ...
7 min čítania
Aviation
Maintenance
+5
Súhlas s cookies Používame cookies na vylepšenie vášho prehliadania a analýzu našej návštevnosti. See our privacy policy.