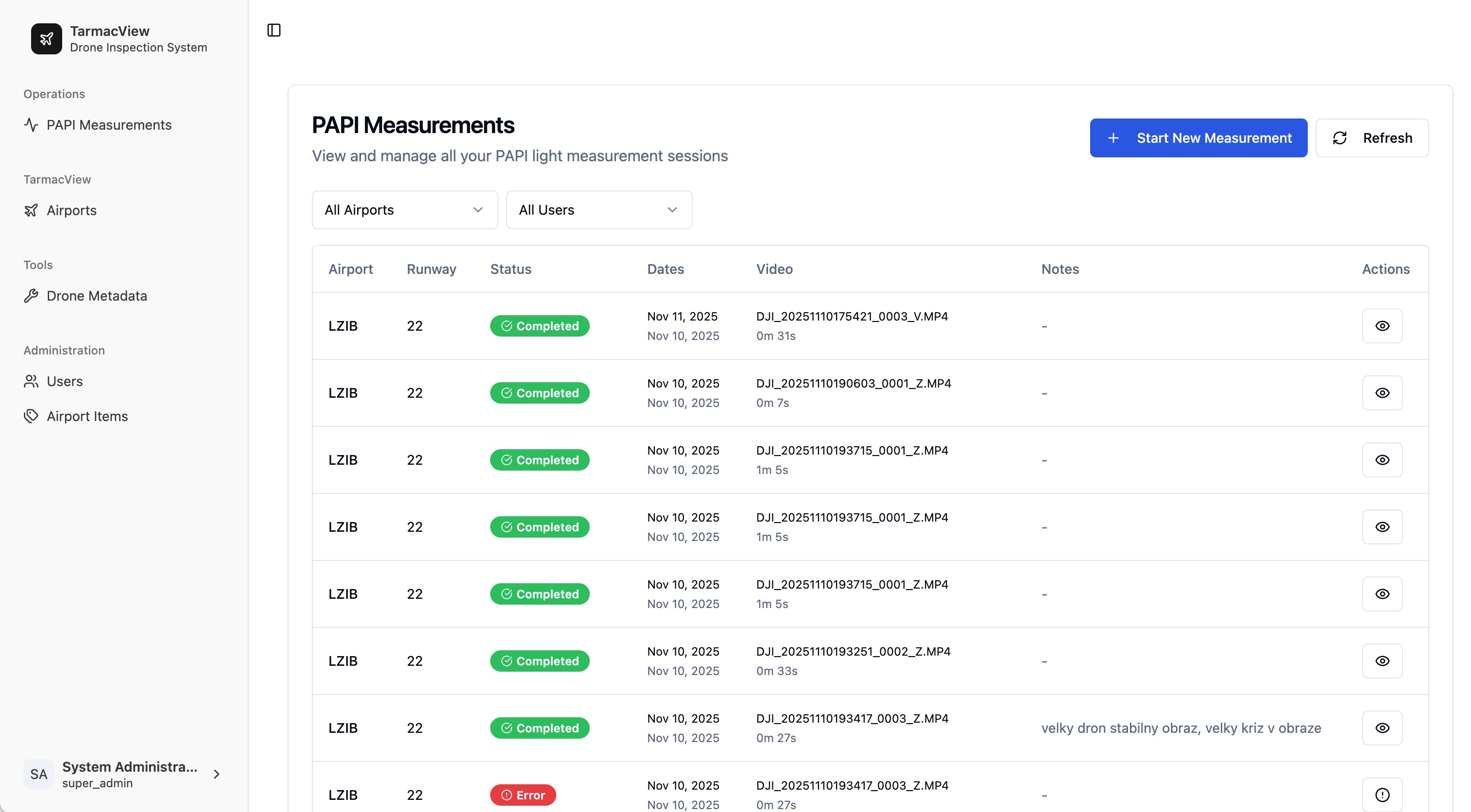

Automated Flight Planning
Precision mission control for repeatable results
1 min read
A deep look into how we turn raw video and GPS data into ICAO-compliant measurements with sub-pixel accuracy.
From raw pixels to precise angles
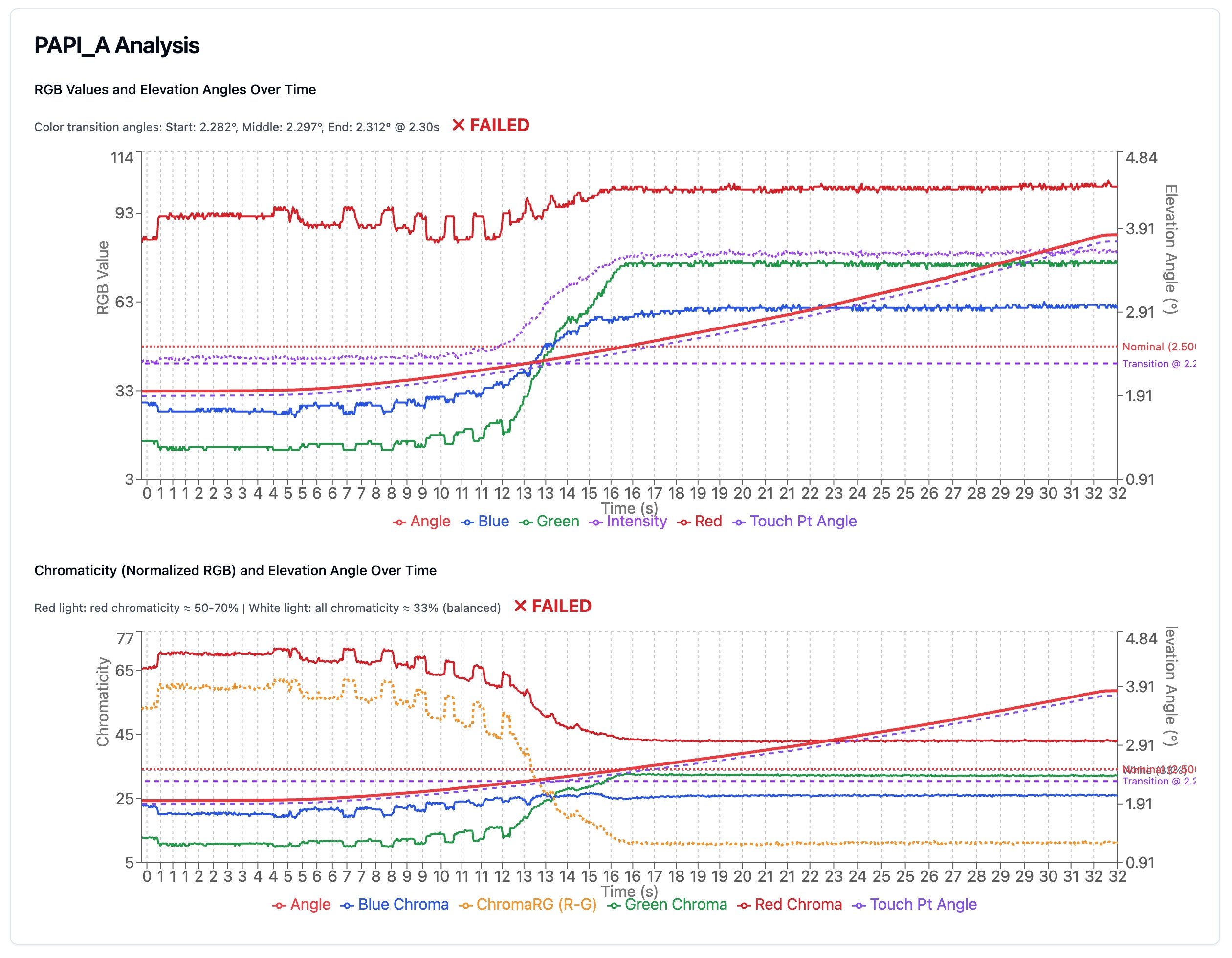
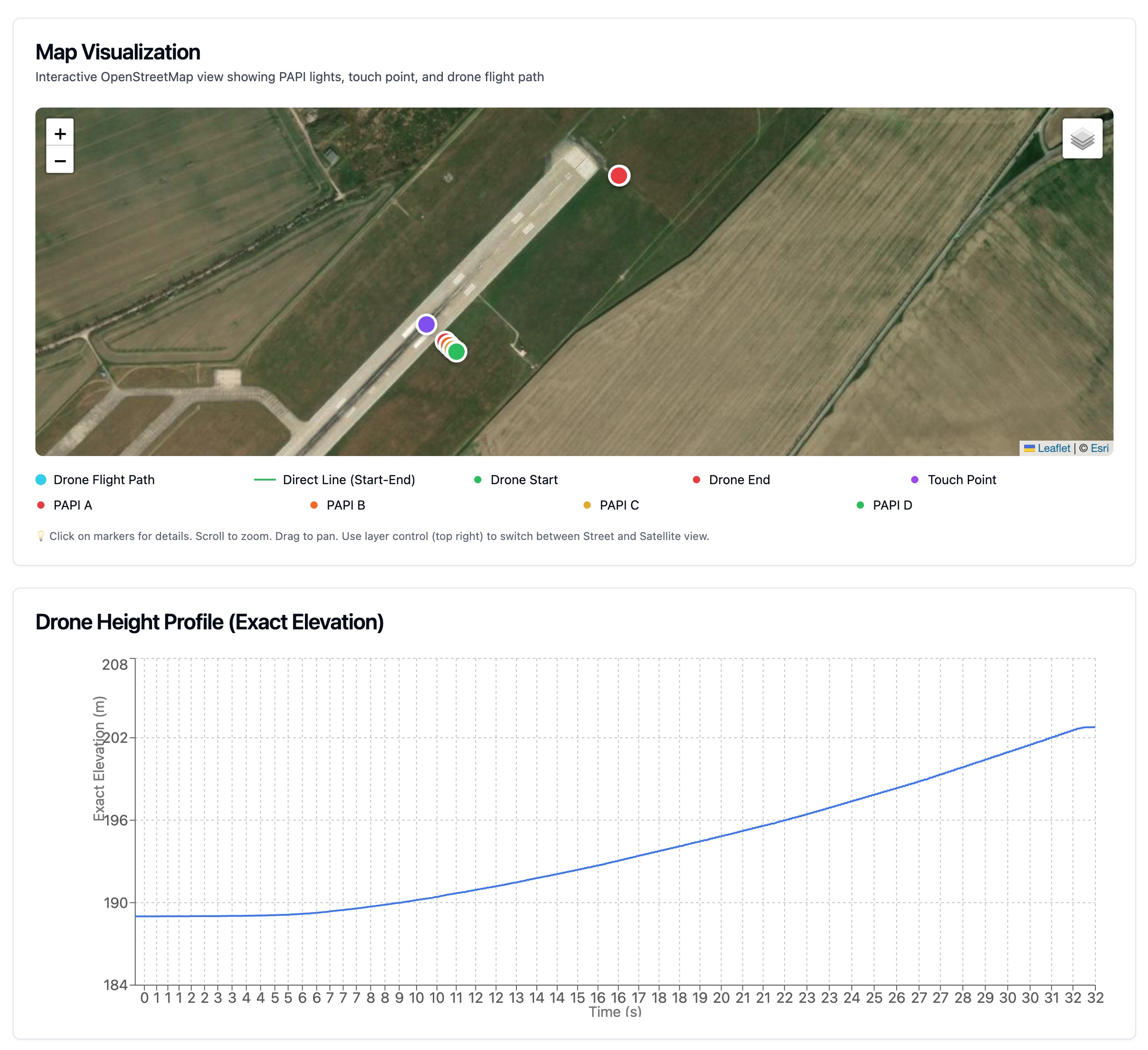
The process begins with high-bitrate 4K video captured at 60fps. Crucially, we synchronize the video frames with the drone's RTK GPS logs using precise timestamps. This allows us to know the exact 3D position (Latitude, Longitude, Altitude) of the camera sensor for every single frame of video, down to the millisecond.
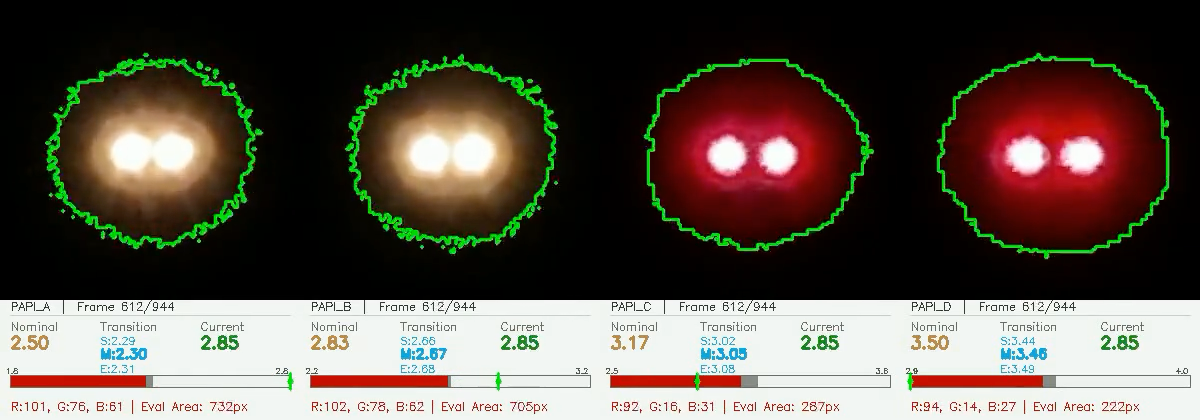
For each frame, we employ a custom blob detection algorithm. It isolates the PAPI lights based on high-intensity thresholds and chromaticity signatures. Instead of just finding the 'center pixel', we calculate the 'intensity centroid'—a weighted average of the pixel cluster. This technique allows us to determine the light's position on the sensor with sub-pixel accuracy (typically < 0.1 pixels), overcoming the resolution limits of the sensor.
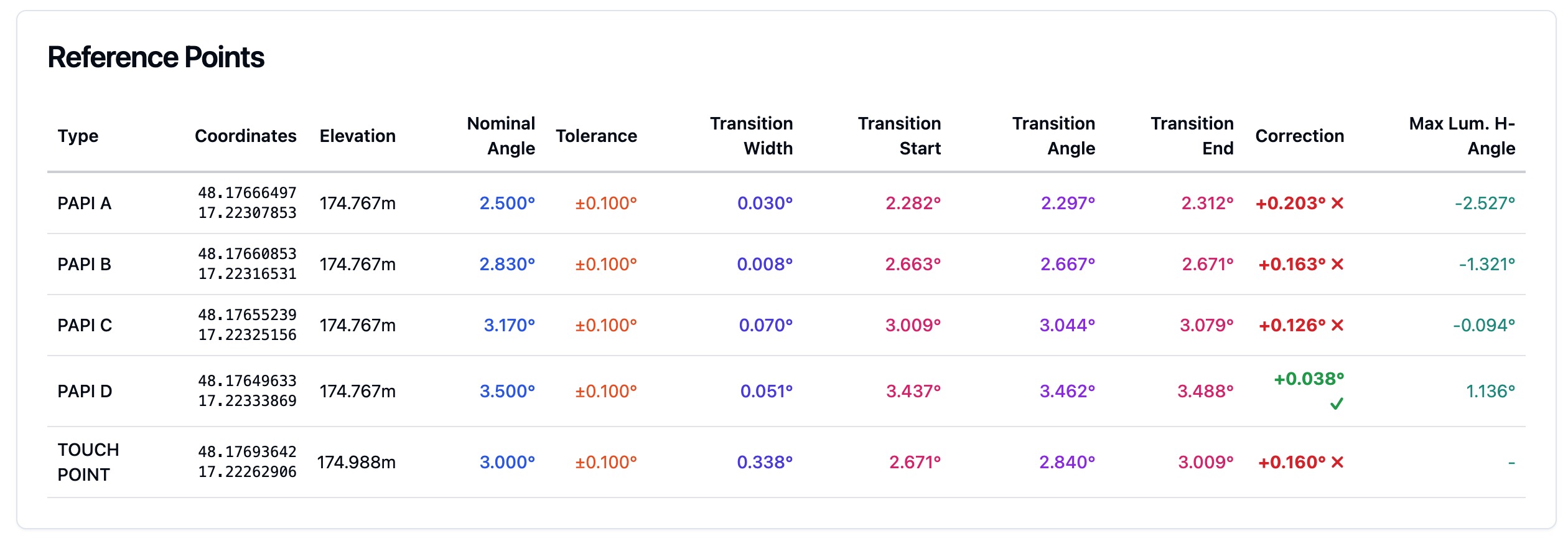
We calculate exact vertical angles relative to two key reference points: the specific PAPI light unit and the runway touchdown point (aiming point). By triangulating the drone's GPS position against these fixed ground coordinates, we verify both the individual alignment of each light housing and the effective glide path angle that guides the pilot to the correct landing spot.
Accuracy Metrics
Our system's accuracy is defined by two main factors: GPS positioning error and optical resolution.
How our drone-based method stacks up against traditional techniques.
| Method | Accuracy | Time / Runway | Repeatability | Disruption | Output |
|---|---|---|---|---|---|
| TarmacView Drone | Superior ±0.017° / ±1 min | ~20 mins | High Automated Path | Minimal No Closure | Digital Report Photo/Video Proof |
| Flight Inspection (Aircraft) | Standard ±0.05° / ±3 min | 2-4 Hours | Medium Pilot Dependent | High Runway Closure | Pass/Fail Analog Data |
| Ground Clinometer | Medium Static Only | 1-2 Hours | Low Human Reading | Medium Access Required | Manual Log No Visual Proof |
A detailed analysis of why each method performs the way it does and how accuracy can be maximized.
Our system achieves superior accuracy by completely eliminating human error. Unlike a pilot who must subjectively judge the color transition, our computer vision algorithms analyze the spectral signature of the light frame-by-frame. Combined with RTK GPS stability, this removes the variability of human reaction time and perception, resulting in consistent, objective measurements that exceed ICAO standards.
Traditional flight inspection relies heavily on the pilot's visual perception to identify the transition from red to white. This introduces significant human error, as the exact 'transition point' is subjective and can vary between pilots or even on different runs. Atmospheric turbulence and the aircraft's speed further degrade the precision of these subjective observations.
Clinometers measure the physical tilt of the light unit housing, not the actual light beam. While the device itself is precise (±1 min), it assumes the light bulb and lens are perfectly aligned with the housing. Accuracy is often compromised by 'settling' of the concrete foundation or human error in reading the bubble level. Digital clinometers and laser interferometry can reduce human error but cannot account for internal optical misalignments.
Unique Advantage
Why choose between data and visual proof when you can have both? Our system is the only solution that combines the rigorous analytical precision of a laboratory instrument with the real-world visual verification of a flight check.
We are building network of partners to revolutionize airport maintenance with cutting-edge technology.
Precision mission control for repeatable results
State-of-the-art algorithms and secure cloud infrastructure
Flexible options for airports and opportunities for drone operators
Cookie Consent
We use cookies to enhance your browsing experience and analyze our traffic. See our privacy policy.